 十款智能遥控小车设计
十款智能遥控小车设计

智能小车渐渐地成为了工科男学习生涯的必做之品,用来消磨时间,或者用来参加各类比赛,不管怎样,智能小车似乎成为了一种象征。所以如果你还没准备做个体验下的话,不久之后,你将会被别人指着鼻子说;“智能小车都没玩过,你真out了”,下面总结了10款智能小车的制作,各有各的优点,赶紧行动起来吧!
1、手势感应无线遥控小车,一块开发板就能360°遥控!
传统的按键式遥控器已经out了,这个小车采用加速度计代替,既可以实现小车的无极转向,也更加方便、灵活的操作控制小车,使遥控小车更具有可控性,趣味性,以及准确实时性。
通过加速度器LIS302DL反馈使用者手势的变化,将四个方向的倾斜角度经过控制器进行数据处理后,通过无线模块将指令发送给小车,实现小车前进、后退、停止、左转、右转的功能。
2、51单片机的安卓蓝牙小车 智能遥控小车
普通的遥控小车已经满足不了大众的需求,要是手机能控制那就好玩多啦。这个小车材料很简单,四个电机轮子、一个驱动模块,把程序下载到51单片机就可以直接玩啦,手机上位机程序更是直接安装使用。有了附件里的文件,零基础这样能玩转小车。
3、三轮智能小车设计
三腿的蛤蟆不好找,但是三个轮子的小车还是可以设计出来的。这个小车不同于四个轮子的小车,前面的万用轮使小车的转向更加灵敏。采用PWM驱动芯片控制电机,红外传感器检测黑线,金属传感器检测铁片,光敏器件检测光强,红外LED和一体化接收头来避障。轻松完成避障、寻光、测速等功能。
4、避崖多方位蔽障小车(配视频并提供技术支持)
制作难点:1.超声波蔽障的时序,你要保证你在制作超声波时序的同时,还有避崖,所以不能用delay;2.超声波,舵机,电机三者的协调;3.实时快速反应,整个过程的程序要流畅,不能停留在某一处。
亮点:1.整个程序用时间片制作,没有用到一个delay;2.超声波,舵机,电机三者的协调得比较好。
5、基于树莓派的环保“捡垃圾”机器人小车(避障、摄像、红外、WIFI)
虽然这个小车的硬件不是自己设计的,但从代码实现上来看,难度应该是最大的。这个小车的亮点是能识别设定的物体,当然这个设定要提前在代码里实现。其他的一些功能在上述小车中也同样涉及到,比如避障、wifi、摄像等。
6、基于单片机的智能自动寻光循迹灭火小车
小车可以按照给定的路线行走,找到光源并尽快的行走到光源附近,启动风扇(相当于灭火),灭火后还可以按照以前的路线继续前进。这个工作受地面摩擦、机器人惯性、机器人电机的转数差、电压变化等多个因素影响,它模拟了现实机器人处理火警的过程,灯泡代表燃起的火源,机器人必须找到并熄灭它。如果产品化的话,一些非常危险的场合就能派上用场了。
7、两轮平衡小车,提供全部原理图、PCB、源程序、BOM
这个两轮平衡小车采用的处理器是atmel的ATMEGA32A,下位机采用AS 6编写,上位机可用手机安装蓝牙串口软件,用于控制小车。看了小车的测试视频,不明白为什么要加了两个那么大的音箱,还得请设计者说明呀。
8、简单的WiFi视频小车制作(原理图,上位机、下位机代码)
使用的是STC89C52单片机,P0口8个数据位两两控制一个电机,共四个电机;使用LM2575输出正5v电源,主控板上有两个usb接口,一个串口调试接口;附件提供了上位机安卓程序,下位机单片机源程序,编译成功的文件。
本制作以STC89C52RC单片机和ADXL345加速度模块。加速度模块固定在手上时,当手向左倾斜,小车左转;手向右倾斜,小车右转;手向前倾斜,小车前进;手向后倾斜,小车倒退;手水平不动,小车停止任何动作。有效控制范围 10米(开阔地)。小车视频可以见教程附件。
10、基于Arduino开源平台的wifi视频监控小车
这个创意是个舶来品。记得有个国外作者做了一个基于Arduino和wifi路由器的智能机器人。
要求有摄像头,能够拍摄小车经过地方的影像。要求使用Arduino模块实现控制。
-
智能遥控小车
+关注
关注
3文章
2浏览量
1031
发布评论请先 登录
低成本DIY视频预览遥控小车
基于蓝牙遥控的多功能智能小车设计
无线智能遥控小车的设计与制作
基于STM32的可遥控智能跟随小车的设计与实现
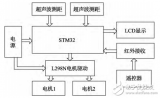
基于STM32的重力感应无线智能遥控小车设计

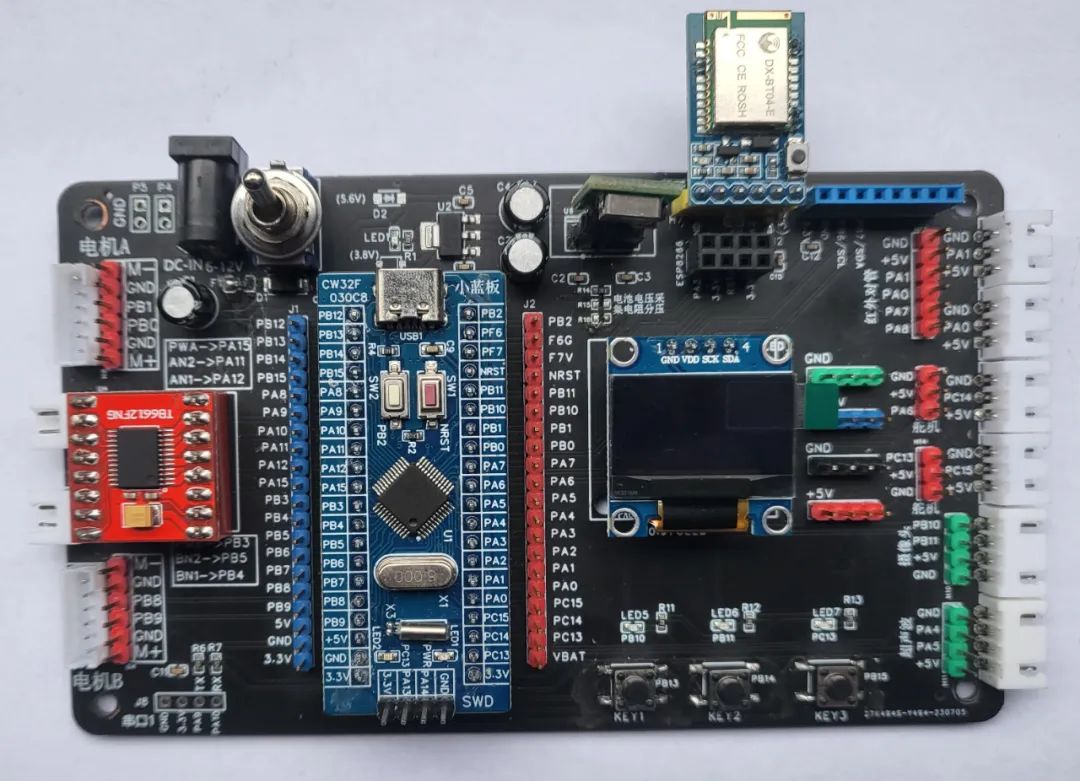
基于CW32的遥控循迹小车



评论