 如何理解具身智能的重要性
如何理解具身智能的重要性

在人工智能(AI)的快速发展中,我们见证了从简单的计算和数据处理到复杂的模式识别和决策制定的转变。然而,真正的智能不仅仅是对信息的处理,还包括与物理世界的互动。这就是具身智能的核心理念,它强调智能体必须具备感知环境、移动和操作物体的能力。
1. 感知与行动的结合
传统的AI系统,如计算机视觉和自然语言处理,主要关注于信息的处理和理解。这些系统通常在隔离的环境中运行,与物理世界的互动有限。然而,具身智能将感知和行动紧密结合,使智能体能够直接与环境互动,从而更有效地学习和适应。
例如,一个具身智能的机器人可以通过触摸和操纵物体来学习它们的物理属性,而不仅仅是通过视觉识别。这种直接的物理互动为机器人提供了更丰富的信息,有助于其更好地理解世界。
2. 环境适应性
具身智能的智能体必须能够适应不断变化的环境。这要求它们具备高度的灵活性和适应性,能够根据环境的变化调整自己的行为。这种适应性是通过与环境的持续互动来实现的,智能体通过试错和学习来优化自己的行为。
在自动驾驶汽车中,这种适应性尤为重要。车辆必须能够实时感知周围环境,如其他车辆、行人和道路状况,并根据这些信息做出快速决策。具身智能使车辆能够更好地理解和预测环境,从而提高安全性和效率。
3. 学习与进化
具身智能的智能体通过与环境的互动来学习。这种学习过程不仅仅是对数据的被动接收,而是主动探索和实验。智能体通过尝试不同的行为来发现哪些行为能够带来更好的结果,从而实现自我进化。
例如,一个具身智能的机器人可能会尝试不同的抓取策略来拿起一个物体。通过反复试验,它能够学习到最有效的抓取方法。这种学习过程是迭代的,智能体不断地改进自己的行为,以适应新的挑战。
4. 社会互动
人类社会是高度互动的,我们通过语言、肢体语言和情感来交流和合作。具身智能的智能体也需要具备这种社会互动的能力,以便更好地融入人类社会。
例如,一个服务机器人需要能够理解人类的指令,识别人类的情感,并以适当的方式回应。这种社会互动能力不仅要求智能体具备高级的感知和理解能力,还要求它们能够以人性化的方式行动。
5. 伦理与责任
随着具身智能的发展,我们面临着新的伦理和责任问题。智能体的行动可能会对人类和环境产生影响,因此我们需要确保它们的设计和行为符合伦理标准。
例如,自动驾驶汽车在紧急情况下需要做出快速决策,如避免撞到行人或车辆。这些决策需要基于对人类生命和安全的尊重。因此,开发具身智能系统时,我们必须考虑其伦理影响,并确保它们的行为是负责任的。
6. 跨学科的融合
具身智能的发展需要跨学科的合作。它涉及到计算机科学、认知科学、心理学、工程学等多个领域。通过这些学科的融合,我们可以更好地理解智能体如何与环境互动,并设计出更有效的智能系统。
例如,认知科学家可以帮助我们理解人类如何通过身体感知和行动来学习,这些知识可以应用于设计更自然的机器人行为。工程师可以开发新的传感器和执行器,使智能体能够更精确地感知和操作环境。
7. 未来展望
随着技术的不断进步,具身智能的智能体将越来越复杂和高效。它们将在家庭、工作场所和公共场所中发挥更大的作用,提高我们的生活质量。
例如,家庭服务机器人可以帮助做家务,照顾老人和儿童。在工业领域,机器人可以执行危险的任务,如在有毒环境中工作。在医疗领域,具身智能的设备可以帮助进行精确的手术和康复训练。
总之,具身智能是人工智能发展的一个重要方向。它强调智能体与物理世界的互动,使智能体能够更好地感知、行动和学习。随着技术的不断进步,具身智能将在各个领域发挥越来越重要的作用,推动社会的发展和进步。
-
人工智能
+关注
关注
1821文章
50485浏览量
267632 -
数据处理
+关注
关注
0文章
655浏览量
30103 -
具身智能
+关注
关注
0文章
547浏览量
918
发布评论请先 登录
导远科技入选具身智能行业多项榜单


openKylin与OpenLoong共推具身智能产业落地
具身智能交流会
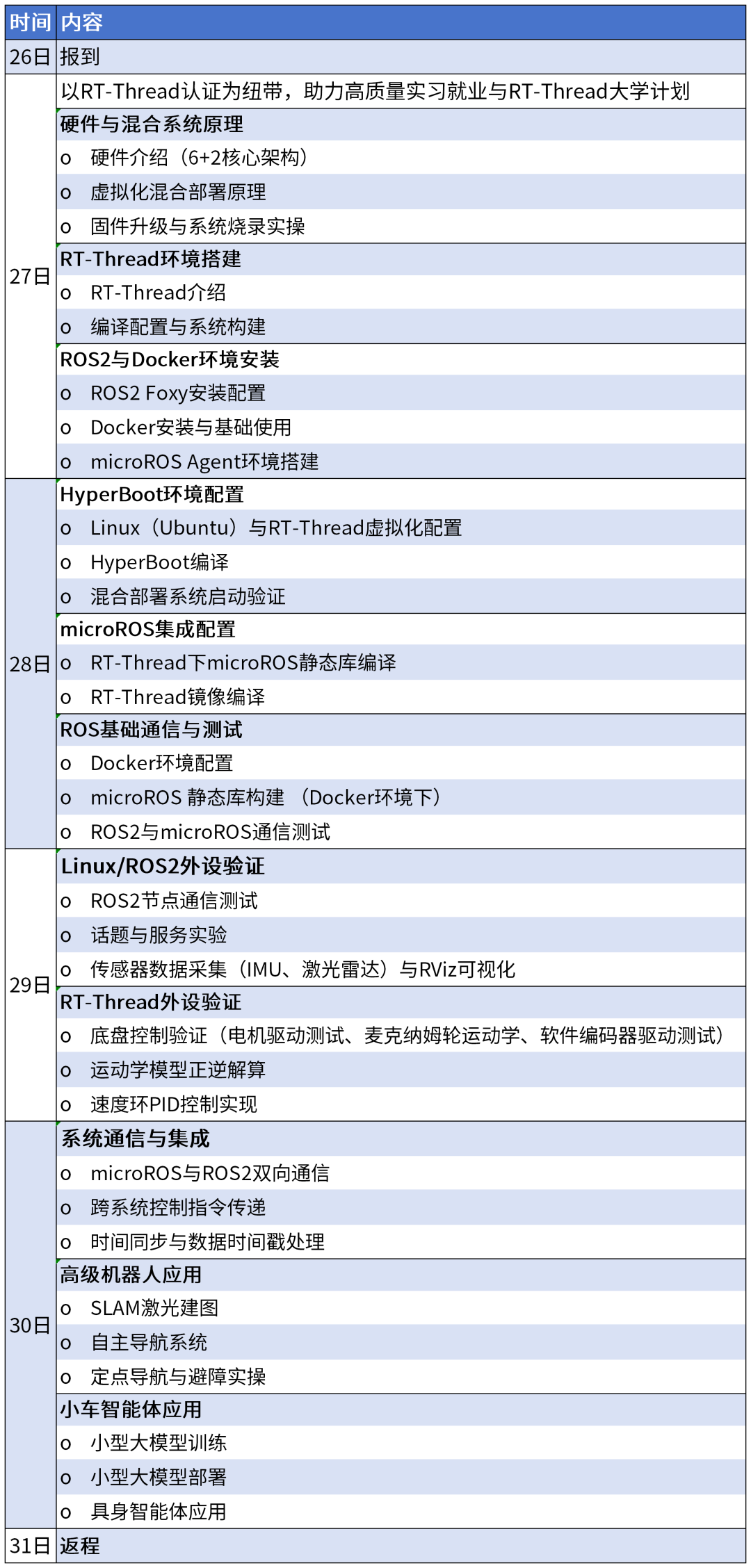
RT-Thread OS混合部署暨具身智能应用开发师资培训通知 | 雄鹰计划
2025开放原子开发者大会具身智能分论坛成功举办
什么样的智能体才能称为具身智能?

自动驾驶与具身智能技术上有什么共性及差异?

【「AI芯片:科技探索与AGI愿景」阅读体验】+具身智能芯片
广和通发布新一代具身智能开发平台Fibot





评论