 一种基于光强度相关反馈的波前整形方法
一种基于光强度相关反馈的波前整形方法
摘要
基于反馈的波前整形通过散射介质聚焦光是一种成熟的方法。在传统的基于反馈的波前整形中,入射光被分成N个输入模式,这些模式由空间光调制器(SLM)使用N个段进行调制,每个段具有相同数量和大小的像素。在这里,课题组提出了一种基于光强度相关反馈的波前整形方法,该方法使用遗传算法在比传统方法更短的时间和更少的迭代次数内实现所需的波前整形。在该方法中,相位掩模被划分为几个区域,每个区域根据光强分布分配不同的相位调制单元,SLM的像素被非均匀地分组以调制入射光。与传统方法相比,课题组使用四个子区域的方法的实验响应时间缩短了15.6%,增强因子提高了30.4%。
01简介
光散射发生在油漆、牛奶或生物组织等介质中。当光在这种介质中传播时,会发生多重散射,这会降低能量,降低空间相干性,并使用相干光引起斑点,所有这些通常都是不良的。因此,控制光在散射介质中的传播是一个值得研究的课题。
波前整形是一种通过在时空域上整形波前来控制入射光传播的方法。前人利用空间光调制器(SLM)来调节入射光的波前,以便在穿过散射介质后在任何所需的位置产生焦斑。近年来,这种方法已被应用于光的光谱控制、超短脉冲的压缩和生物组织成像等用途。这种方法的基本思想是产生入射光的最佳波前,以补偿散射介质对其的失真。已经开发了几种方法来生成最佳波前,如光学相位共轭、传输矩阵测量和迭代优化。在这三种方法中,迭代优化,也称为基于反馈的波前整形,是一种易于实现的方法。入射光被分成几个部分,每个部分的相位被随机初始化,优化算法确定最佳相位掩模,以通过散射介质产生清晰的焦点。在这个过程中,已经采用了各种迭代优化算法来搜索最佳相位掩模。在这些优化算法中,遗传算法(GA)因其强大的抗噪性而被广泛使用。
课题组提出了一种基于光强依赖反馈的波前整形方法。与传统的基于反馈的波前整形不同,入射光的输入模式根据入射光的强度分布进行非均匀分割。在该方法中,光强度决定了如何对SLM像素进行分组。相位掩模被划分为几个区域,其中高强度区域中的区域被分组为更小的、因此数量更多的段,并且为了调制的目的被加权得更重。基于光强度相关反馈的波前整形在焦点处产生更高的强度,并且需要更少的时间进行优化。
02方法与实验
在基于反馈的波阵面整形中,入射波阵面被分为N个部分,每个部分的相位被调制,以使通过散射介质传输的光的焦点处的强度最大化。根据惠更斯-菲涅耳定理,目标处的透射光场是所有分段的线性组合,如

其中An和Φn分别是n段的振幅和相位,tmn是一个透射矩阵,它将入射光和透射光通过散射介质联系起来。N个片段的最佳校正可以产生清晰、强烈的焦点。
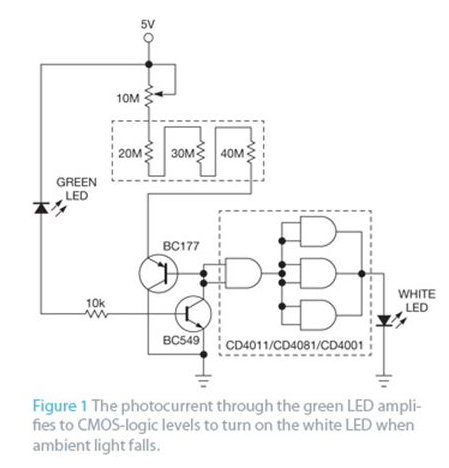
基于反馈的波前整形实验的示意图如图1所示。实验所用空间光调制器为UPOLabs的HDSLM80R。光束尽可能照亮SLM的中心并覆盖SLM的短边,以实现最佳调制。调制光束被物镜(O1)聚焦到散射样品(S)的后表面上。散射样品是磨砂玻璃板。然后,散射样品后方一个点被物镜(O2)和透镜(L)成像到CCD相机上,作为目标区域。使用中性密度滤光片(NDF)来避免激光对CCD相机的损坏。选择增强因子作为反馈信号,其定义为EF=Ifocus/Iaverage,其中Ifocus是聚焦在CCD相机上的目标区域的平均强度,Iaverage是优化前的平均背景强度。利用迭代优化算法优化入射光的波前。首先,在SLM上加载零相位掩模。未经调制的入射光在CCD相机上形成了随机的低强度散斑图案。执行由遗传算法驱动的闭环迭代优化反馈,以搜索生成焦点的最佳相位分布。随着反馈信号的增加,目标区域逐渐形成清晰而强烈的焦点。
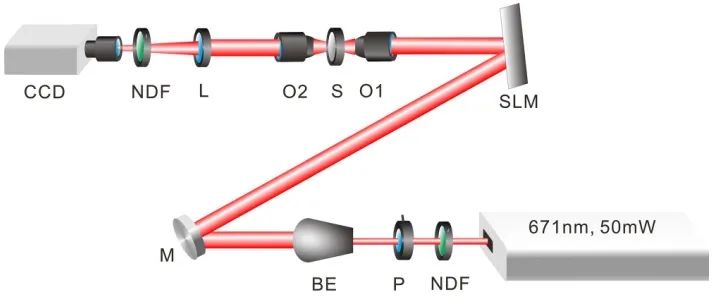
图 1.基于反馈的波前整形实验示意图
NDF,中性密度滤光片;P,偏光片;BE,扩束器;M,镜子;SLM,空间光调制器; O1和O2是显微镜物镜;S,散布介质;L,镜头。
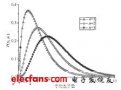
在像素合并策略方面,使用了一种基于入射光空间分布的反馈波前整形方法。入射光的强度分布如图2(a)所示。在实验中,入射激光强度呈高斯分布。入射光的中心具有最高的强度,并且强度从中心向外降低。只调制入射光照射的区域,该区域应从中心向外划分为一定数量的区域。像素根据束腰半径在每个子区域中分组,并用于形成非均匀分组的调制相位掩模。然后运行遗传算法以生成最佳的非均匀相位掩模。图2(b)-2(f)说明了该方法的波前分割原理。如图2(b)所示,获得了一个非均匀相位掩模。四个子区域的相位掩模如图2(c)-2(f)所示。
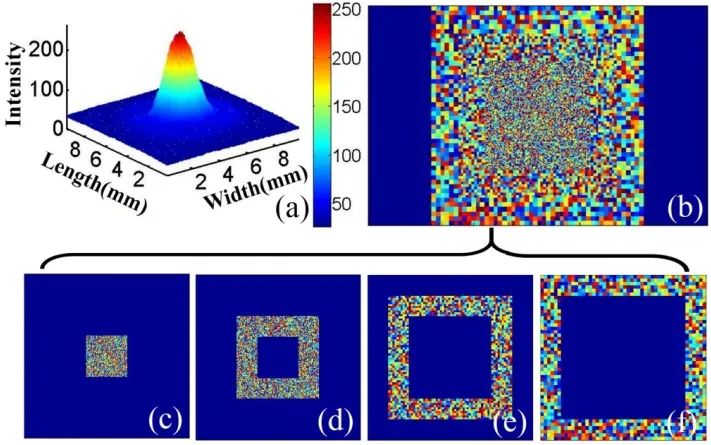
图 2. 入射光分布和四个子区域的相位掩膜。
(a) 实验中入射光的强度分布。(b) 将相位掩膜分为四个子区域并进行非均匀分组。(c) 最内侧的子区域,其中5×5像素分组,得到3600个片段 (d) 第二个子区域,其中6×6像素分组,得到 7500 个片段。(e) 倒数第二个子区域,其中15×15像素分组,得到2000个线段。(f) 最外侧的子区域,其中25×25像素分组,得到1008个片段。
03结果与讨论
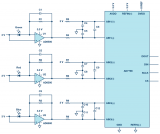
课题组将该方法与传统方法在基于反馈的波前整形方面的性能进行了比较。传统方法的最佳相位掩模如图3(a)所示。使用两个子区域的方法的最佳相位掩模如图3(b)所示。使用三个子区域的方法的最佳相位掩模如图3(c)所示,该方法有四个子区域的最佳相位掩模如图3(d)所示。图3(e)比较了传统方法和该方法的增强因子的演变。
可以看出,使用该方法,四个次区域的收敛速度最快,增强系数最高,其次是三个次区域和两个次区域。与传统方法对比,该方法只需更少的迭代次数就可以获得相同的增强因子。因此,该方法提高了基于反馈的波前整形的效率,用于通过散射介质聚焦光。传统方法和该方法获得的焦点如图3(f)-3(i)所示。使用识别板校准光学系统,CCD相机的一个像素对应于预期焦点位置的约0.3μm。在实验中,焦斑的尺寸被测量为约2.4μm,似乎小于成像系统(物镜和透镜)的衍射极限。实际上,已经证明,散射介质而不是成像系统通过使用基于反馈的波前整形方法来确定散射介质中焦斑的大小。此外,尽管这些焦斑的峰值强度几乎相同,但两种方法的平均焦点强度与图3(e)所示的增强一致。
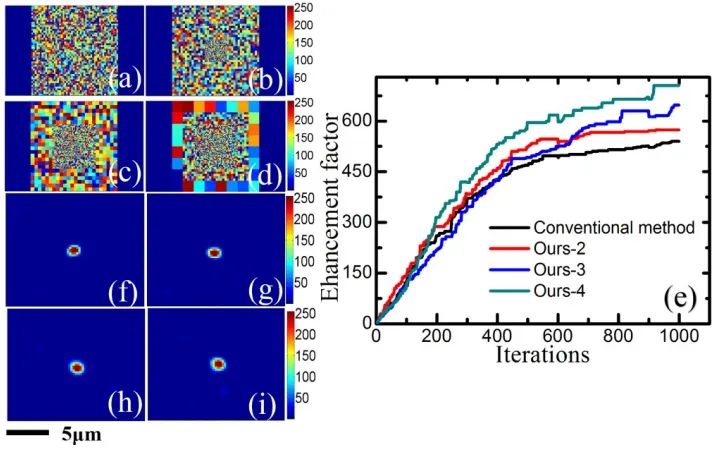
图 3.传统方法与通过散射介质聚焦光的方法的性能比较
(a) 通过常规方法获得的最优相位掩模。(b)–(d)该方法的最佳相位掩码显示为 (b)两个子区域、(c)三个子区域和(d)四个子区域。(e)在相同的实验条件下,使用两个亚区、三个亚区和四个亚区将常规方法的增强因子与该方法进行比较。(f)–(i)传统方法和该方法的焦点:(f)传统方法,(g)两个子区域,(h)三个子区域,以及 (i)四个子区域。
由于调制单元的数量对增强因子有很大影响,进一步将该方法与四个子区域以及调制单元数量为1440、2560、5760、10240和23040时的传统方法进行了比较。结果如图4所示。该方法的增强因子分别提高了85.2%、30.4%、39%、24.6%和6.7%。使用四个子区域的方法随着调制单元数量的增加而增加的增强因子总是高于传统方法,但增长率逐渐下降。这可以通过SLM上的像素随着调制单元数量的增加而更密集地分组来解释,因此非均匀组合实现的改进变得不那么明显。然而,当相位调制单元的数量非常大时,该过程非常耗时。尽管如此,该方法成功地平衡了时间要求和聚焦效率。
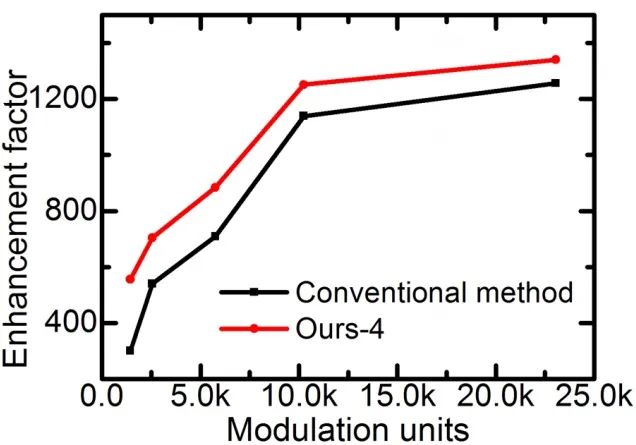
图 4.当调制单元的大小不同时,该方法与四个子区域和传统方法的增强因子比较。
该方法使用两个子区域、三个子区域和四个子区域的单次重复时间约为对比传统方法分别减少了约14.6%、15.3%和15.6%。
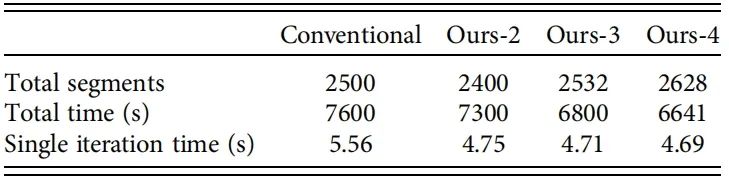
表 I. 该方法和常规方法所需的时间。
与单次迭代过程一样,遗传算法对旧的像素合并相位掩模进行调制,以产生新的最优相位掩模。然后,这个像素合并相位掩模应该反转为全像素相位掩模,并加载到SLM上,以检查焦点的新增强。在这里,一个完整的迭代过程被分为两个子过程。一个是硬件过程,包括将相位掩模加载到SLM中,用CCD相机捕获图像并传输到个人计算机。另一个是软件过程,由相位掩模的优化和调整两部分组成。前者是找到优化的相位掩模。后者是放大像素合并相位掩模,以适应SLM的屏幕尺寸。硬件时间由仪器的性能决定。相位掩模的优化时间由遗传算法的参数决定。相位掩模调整时间由其计算复杂度决定。由于两种方法使用了相同的仪器和遗传算法参数,推断出由于相位掩模调整时间不同而产生的时间差异。
在相位掩模的调整时间方面,对于该方法,首先将划分为几个部分的最佳相位掩模放大,以分别适应这些子区域。然后,这些单独的相位掩模被聚合在一起,形成最后一个相位掩模,其中包含数百万个适合SLM屏幕尺寸的元素。根据计算机数据结构理论,大维矩阵意味着高时间复杂度。该方法避免了将像素合并相位掩模直接放大到最后一个巨大的相位掩模,从而降低了时间复杂度。此外,该方法还避免了使用连续的大存储空间,从而降低了空间复杂度。因此,该方法可以提高相位掩模的调节效率,缩短其花费的时间,如表1所示。
-
算法
+关注
关注
23文章
4607浏览量
92826 -
相机
+关注
关注
4文章
1350浏览量
53580 -
空间光调制器
+关注
关注
1文章
66浏览量
8708 -
SLM
+关注
关注
0文章
81浏览量
6837
原文标题:基于光强分布的反馈波前整形,用于通过散射介质聚焦光
文章出处:【微信号:UPOLabs,微信公众号:UPOLabs】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
一种基于叠层成像和波前分离的新型无透镜成像方法

引入相关反馈的基于内容音频检索研究
基于模糊聚类表征的音频例子检索及相关反馈
IIC驱动BH1750FVI光强度传感器
一种Hartmann-Shack波前传感器图像的自适应阈值选
一种改进的基于伪相关反馈的查询扩展
基于多尺度分析和SVM相关反馈的纹理图像检索
极微弱脉冲光强度稳定控制技术
美国开发出一种UVLED 光强度是同类LED的五倍
基于一种用于测量光强度的电路设计
基于一种可以适应任何光强度而设计的高功率LED开关电路设计
如何测量不同光源的光强度





 工商网监
工商网监
评论