 基于TSMaster的MIL/HIL仿真开发(空簧和连续阻尼控制篇)
基于TSMaster的MIL/HIL仿真开发(空簧和连续阻尼控制篇)
#01适用范围
本文适用于ASU或CDC的算法开发和验证,尤其适用于控制器底层软件也自主开发或可控的用户,不适用于整套系统完全黑盒的测试用户。因此,本文HIL的测试对象为控制器本身而非整套悬架系统。
#02
仿真前提
满足ASU&CDC的MIL/HIL测试须要满足如下条件
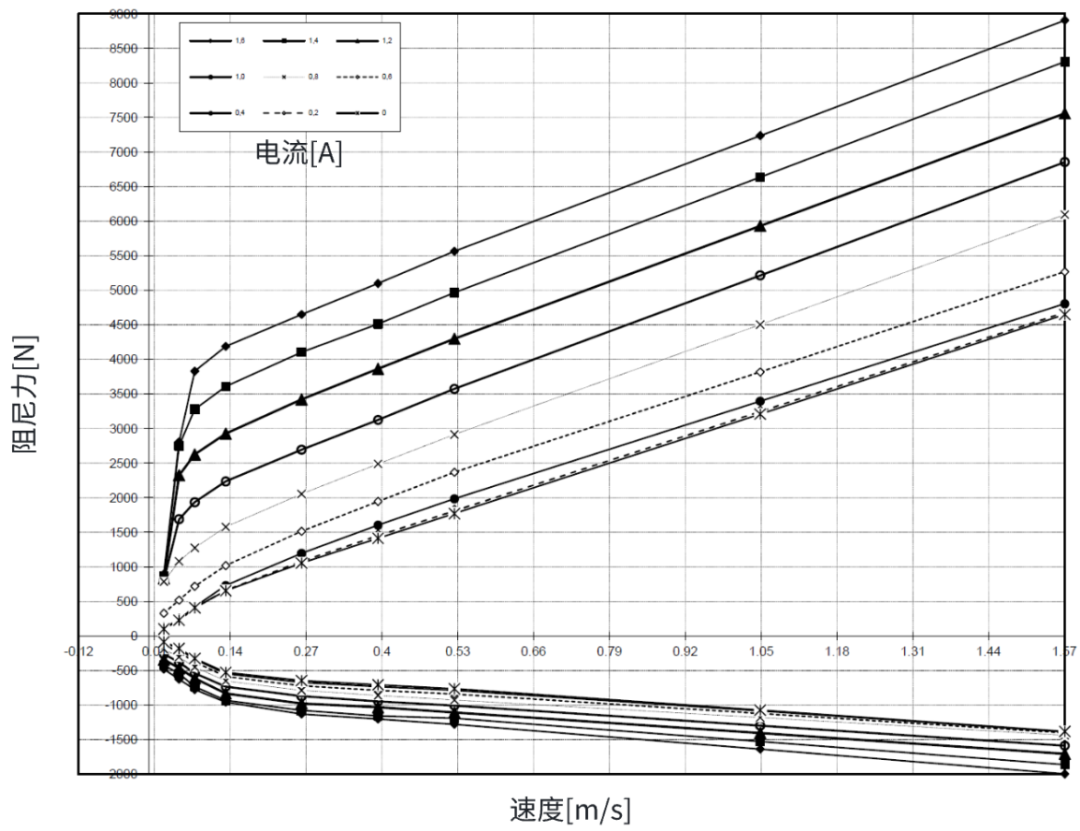
1.建立CDC物理模型,即CDC速度 - 电流 - 力图谱。通常由第三方激振台或CDC供应商提供,参考如下。
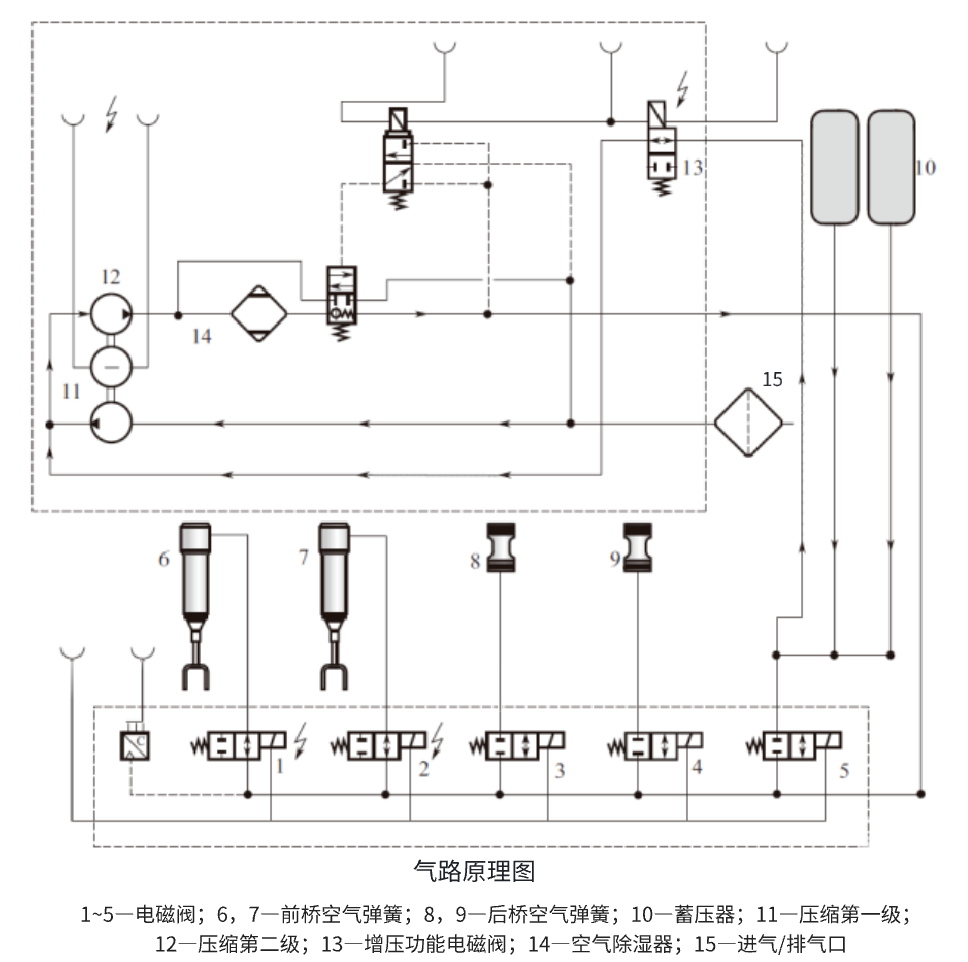
2.建立空簧本体、管路、阀体以及储气罐等物理仿真模型,甲方提供ASU气路原理图以及簧体本身的物理参数。提供ASU实物以及可控制各个阀体/电机动作的A2L文件。
3.匹配控制器的I/O接口。
○供电
○CAN
○速度和加速度传感器(通常为PSI5或PWM)
○采集ASU&CDC电磁阀电流
4.动力学可用第三方商业软件,推荐CarSim。
5.实时仿真系统。
6.部分底层软件匹配,例如bypass内部气压传感器。
#03
SIL/HIL仿真实施
基于ASU&CDC的物理模型,匹配CarSim动力学软件,在Simulink环境中即可完成SIL仿真,此处不作为重点展开。
完成HIL仿真的前提条件是具备一套实时仿真系统。通常一套HIL仿真系统需要由上位机、硬实时下位机、相关机箱和板卡等组成。这套系统往往是复杂的或者说不平易近人的。
TSMaster提供的解决方案是在Windows系统里建立软实时仿真环境用于运行动力学模型。通过CAN总线接口以及支持CAN接口的I/O板卡(例如通过CAN总线控制的PSI5板卡)完成I/O匹配,并通过内存与动力学软件实时交互。此外,TSMaster本身已具备测试用例管理,执行以及后处理能力,至于CAN总线仿真,更不用详述了。
那么参考ASU&CDC的I/O接口须要完成如下准备:
1.笔记本电脑:部署TSMaster和CarSim。
2.CAN工具:可以选择例如TC1014等工具。
3.电源&线束:电源用于对被测件供电;相关线束连接通常使用BOB。
4.PSI5模拟板卡:通过CAN指令控制。
5.板卡以及线束改造:获取电磁阀动作状态(通常通过采集电流)。
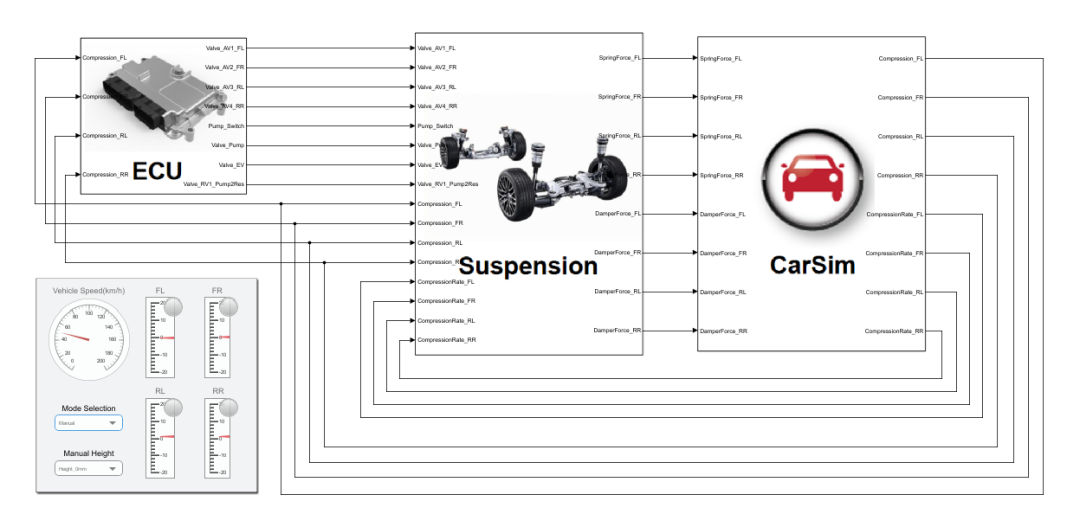
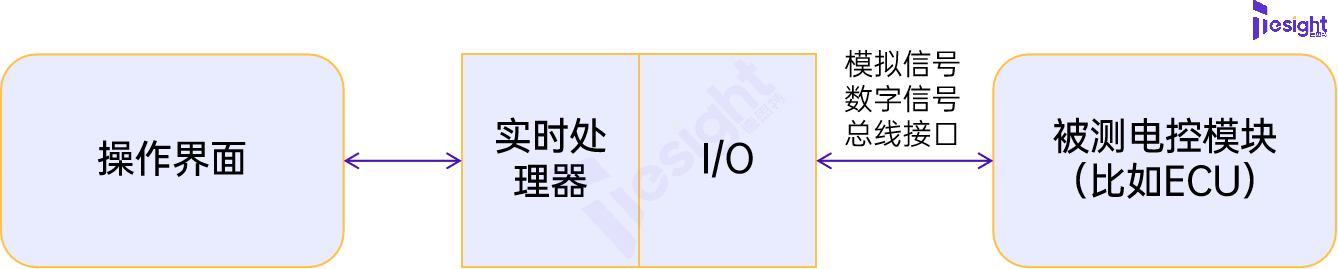
针对上述4和5两条,如果甲方具备底软能力,就可以通过私有CAN将传感器信号传入,将电磁阀电流信号或者驱动状态位通过CAN传出,整套测试系统就可以相应变得更为简洁。那么一套仿真系统也将会变得如下图一样简洁。

#04
案例分享
参考二/三章节,基于甲方提供的必要的信息输入,进行底层软件匹配,进而完成测试仿真系统搭建,参见下图。
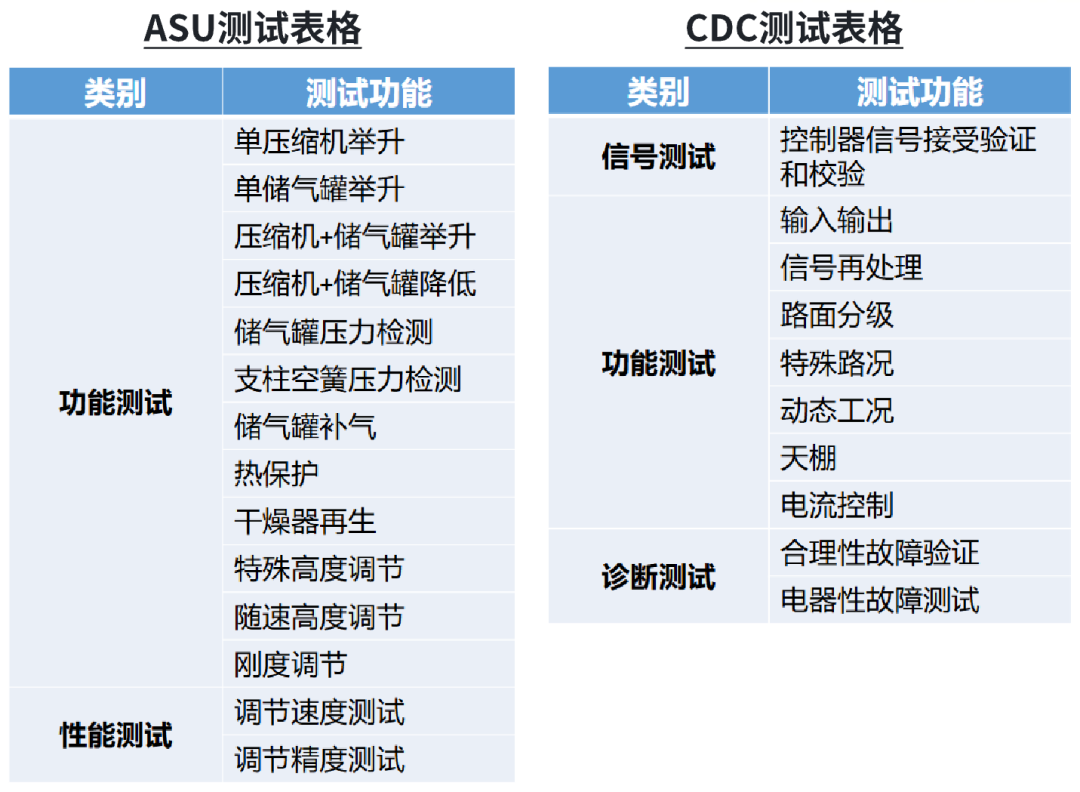
 基于此可以完成大量的测试仿真验证,以下是ASU和CDC测试内容的简要汇总。
基于此可以完成大量的测试仿真验证,以下是ASU和CDC测试内容的简要汇总。
以下为典型的测试工况举例:
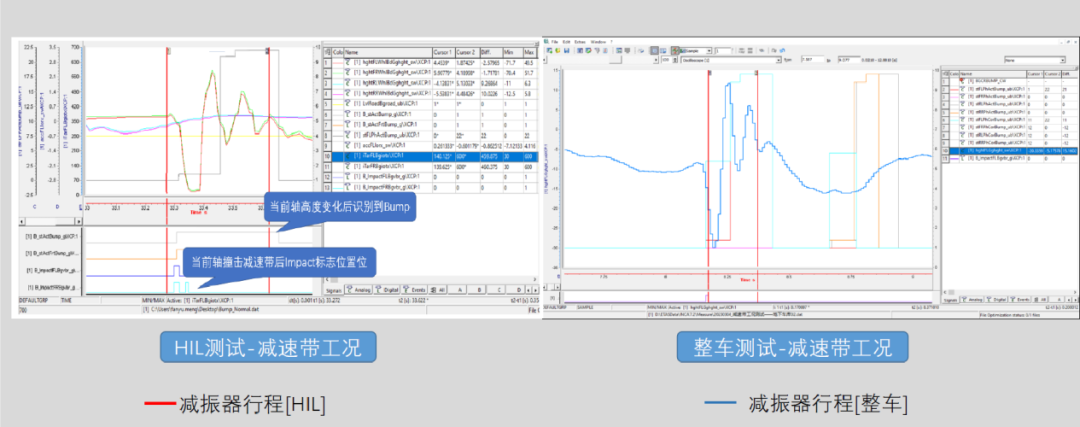
1.CDC减速带工况
HIL测试数据能较好地模拟实车状态,减振器高度波形和幅值吻合度较高,且能准确识别减速带的位置。
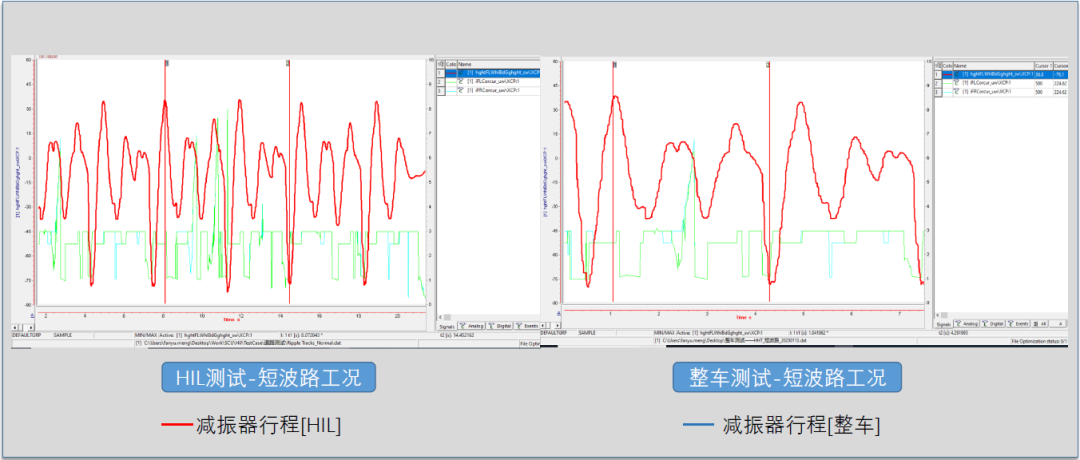
2.CDC短波路面工况
HIL测试数据也较好地体现了整车测试状态,减振器行程波形和幅值有良好的一致性。
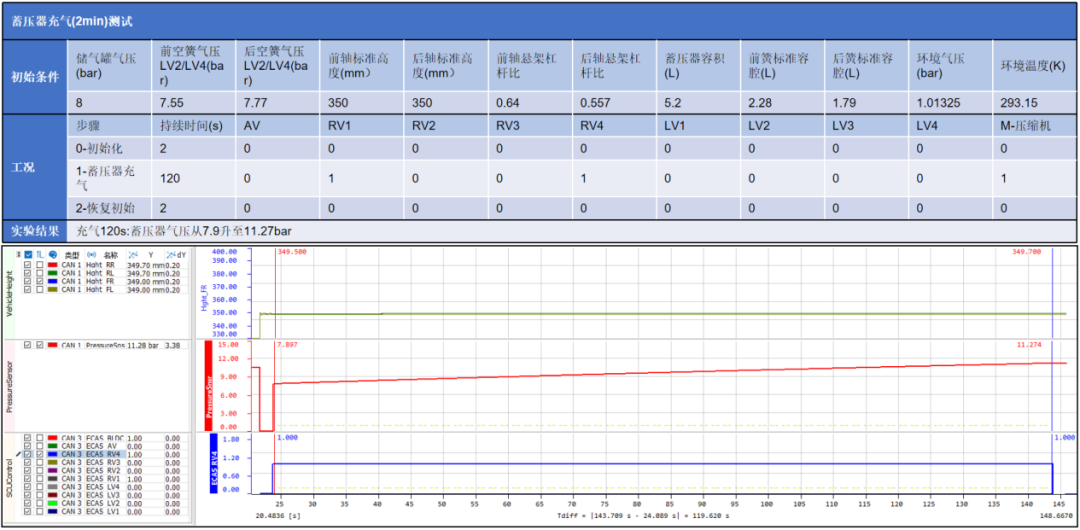
3.ASU蓄压气充气工况
仿真结果为充气120s,蓄压器气压从7.9bar提高到了11.27bar,比较符合实际情况。
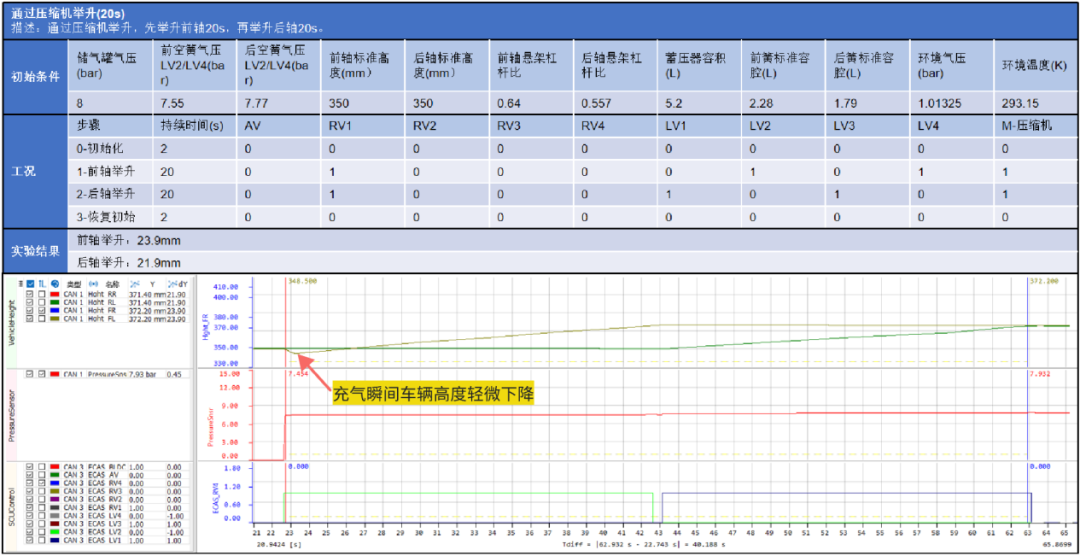
4.ASU压缩机举升工况
通过压缩机举升20s,前后轴分别举升23.9mm和21.9mm,也比较符合实际。此外,还准确模拟出了充气瞬间车辆短时轻微下降的状态(因为此时管路气压较低,且压缩机充气相对较慢)。
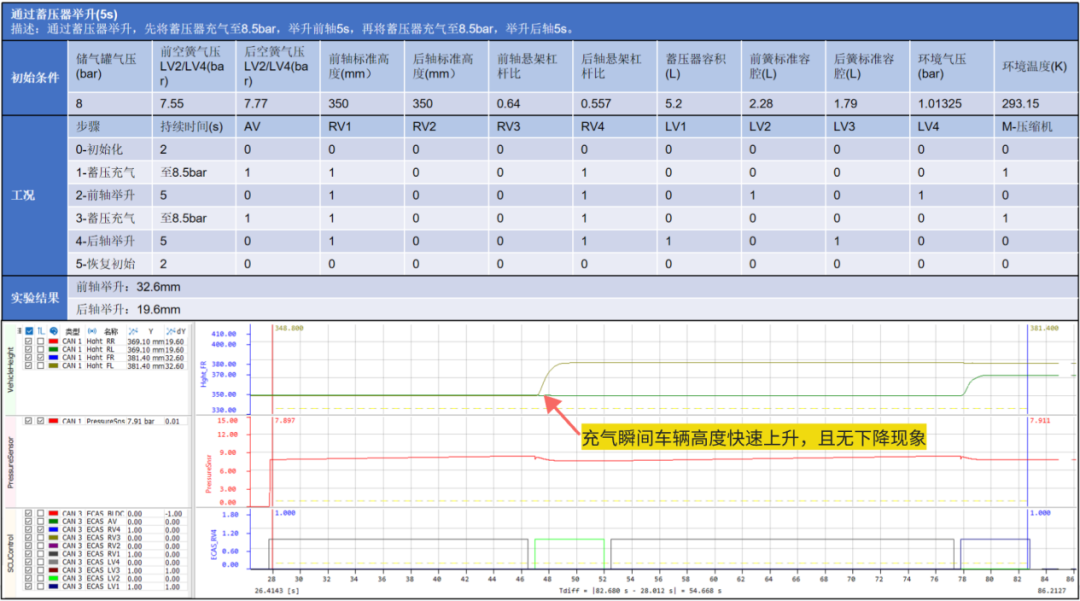
5.ASU蓄压气举升工况
蓄压器举升相对于前述的压缩机要迅速很多,举升5s便可使前后轴分别举升32.6mm和19.6mm,而且充气瞬间也未出现压缩机工况中车身下降的情况,所以模拟状态和实际较为吻合。
#05
后记与个人观点
根据项目经验可以得出以下结论:
1.目前基于模型的开发可以在算法开发的中前期提高开发效率。
2.不推荐不具备底层软件能力的客户使用该技术路径。
3.目前可提供章节三中4和5两条解决方案,但更为推荐使用案例分享中的极简方案(即通过CAN交互阀体状态、高度、加速度信息)。
4.能满足测试需求且高效简洁的HIL系统将成为仿真的主流。单纯堆砌硬件,追求极致物理性能往往会适得其反。因此,针对不同应用场景选择合适的技术路径往往更为重要。
-
控制器
+关注
关注
114文章
16831浏览量
182201 -
HIL
+关注
关注
2文章
64浏览量
17867 -
mil
+关注
关注
0文章
12浏览量
8092
发布评论请先 登录
相关推荐
教学验证篇丨PPEC+HIL LLC拓扑仿真验证
硬件在环(HIL)仿真应用中的LabVIEW FPGA
永磁同步电机HIL仿真系统
连续阻尼控制电磁概述、功能及特点
技术分享 | 使用TSMaster从零打造车辆控制器HIL实时仿真系列4

技术分享|使用TSMaster从零打造车辆控制器HIL实时仿真系列5-ECU HIL仿真的具体实施

技术分享 | 使用TSMaster从零打造车辆控制器HIL实时仿真系列2-ECU嵌入式代码生成与TSMaster小程序集成
技术分享 | 使用TSMaster从零打造车辆控制器HIL实时仿真系列3-脱离RT的车辆模型的实时仿真

快速控制原型RCP与硬件在环仿真HIL该如何区分呢?

教学验证篇丨PPEC+HIL BUCK仿真验证

干货分享 | TSMaster软件指南
【干货分享】硬件在环仿真(HiL)测试

汽车HiL测试:利用TS-GNSS模拟器掌握硬件性能的仿真艺术





 工商网监
工商网监
评论