 多台仓储AGV协作全局路径规划算法的研究
多台仓储AGV协作全局路径规划算法的研究
对于自动导引车(Automated Guided Vehicle,AGV)的单机路径规划问题,已存在很多静态算法可以有效求解。但由于 AGV间抢占系统资源的相互影响和制约,多台AGV的协同作业会出现死锁、碰撞冲突等问题,静态路径规划算法无法满足实时动态作业的系统需求。智能仓储系统中,多AGV动态路径规划的核心问题不再仅是单AGV快速求解最优路径,而在于多台AGV的冲突避免或解决,达到整体协调最优。
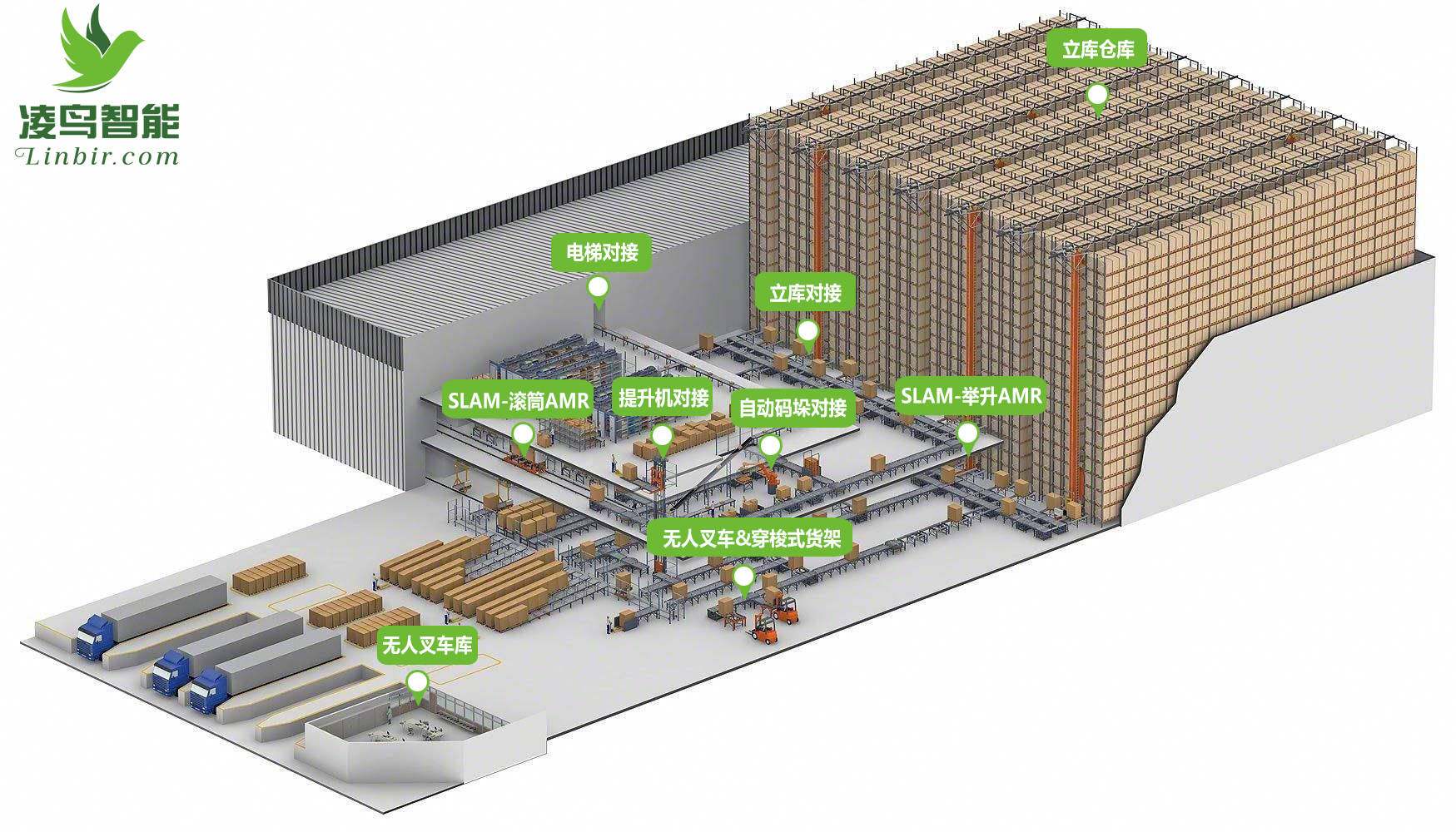
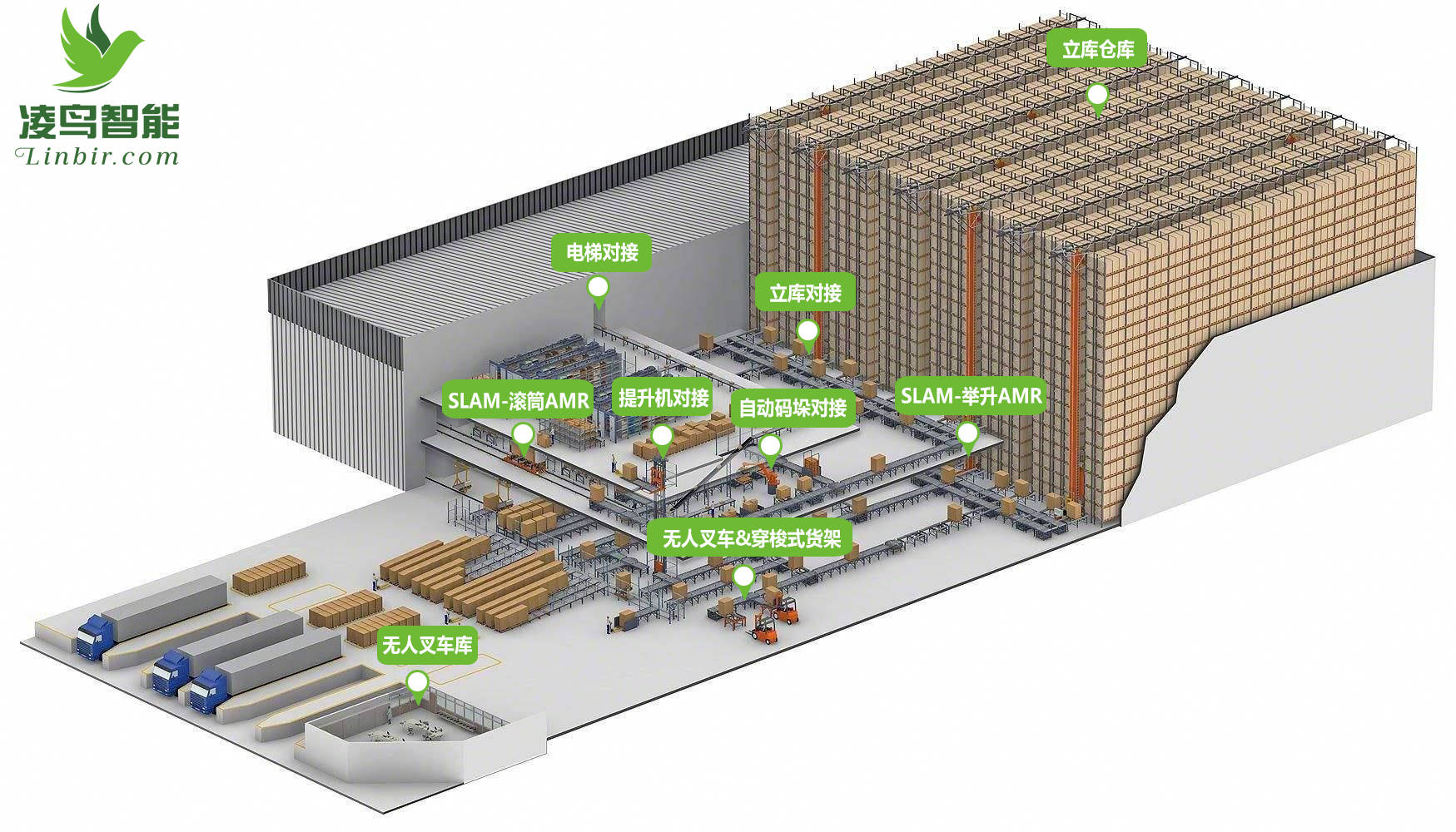
仓储AGV
要使得多个机器人在道路规划上最优,无非是在单个小车规划路径时考虑其他小车的行驶路线,进而选取最优的一个行驶方案。另外,不同于室外场景,我们在仓库中规划小车路径,整个道路都是可以设计的,所以我们的问题可拆解为:
(1) 仓库中道路的设计;
(2) 获取到其他小车的路径行驶状态;
(3) 定义可能的道路拥堵;
(4)规划最短路径;
(5) 交通管制。
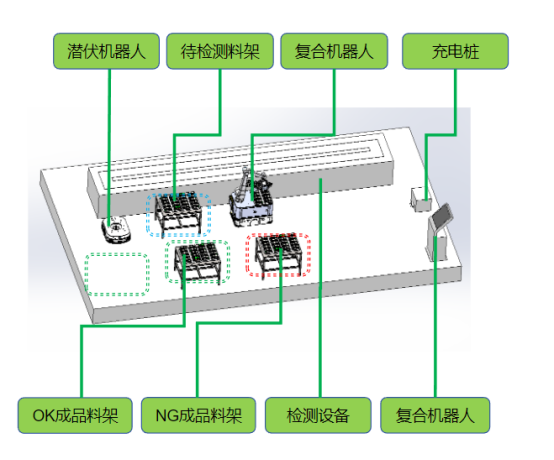
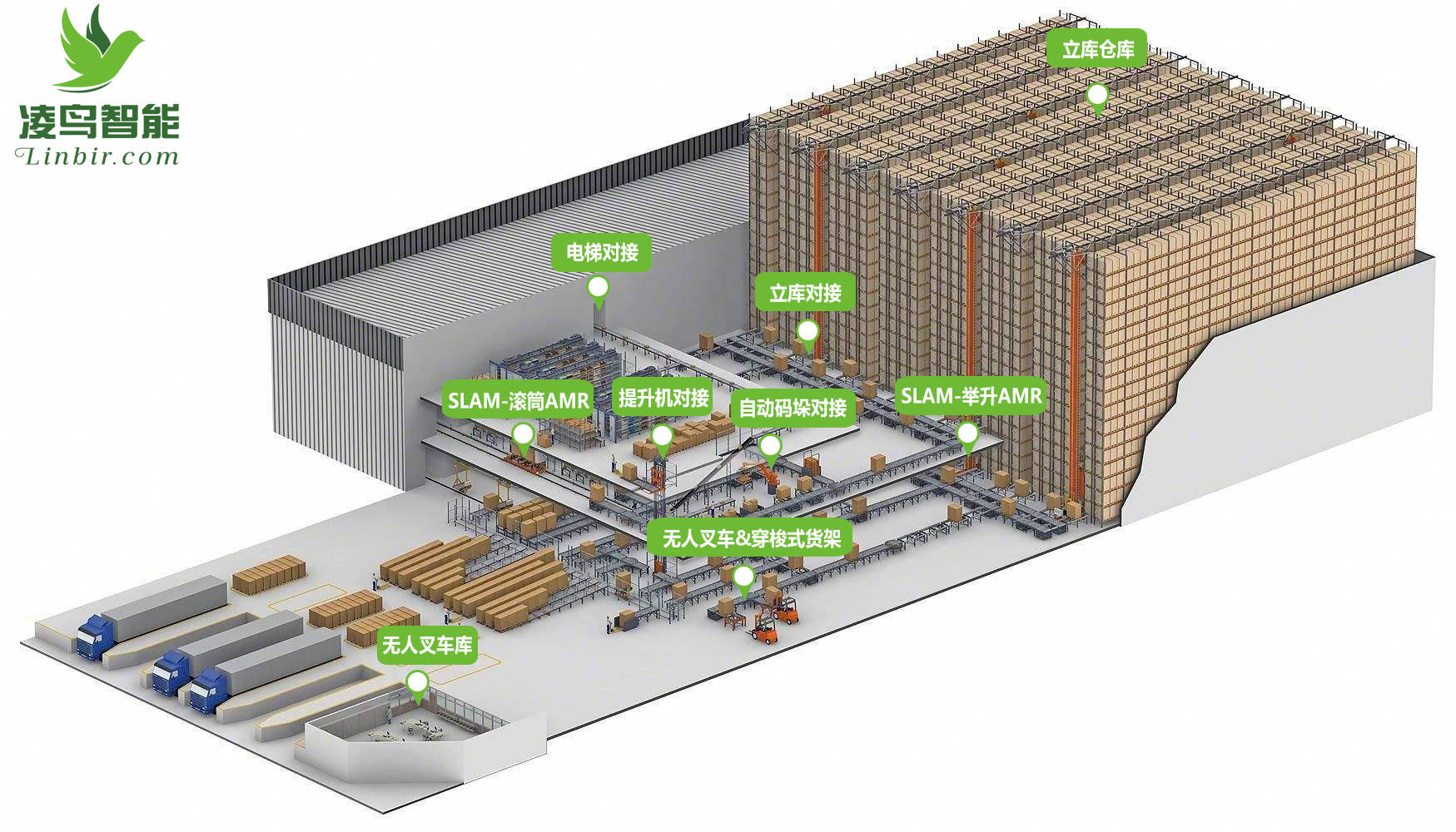
 多AGV
多AGV
在规划AGV小车路径时,要在考虑到道路拥堵的情况下去规划最短路径,以满足整体规划结果最优,使用A*算法,用G值为参考检查新的路径是否更好, 将地图中其他小车规划的路径的点的G值增加,即可尽量避免搜索到相同的路径,同样的道理,在车辆需要转弯的时候,也同样增加转弯下一点的G值,从而规划路径尽量避免转弯的情况出现,来达到整体效率最高,全局路径最优。
此外,由于路径规划都是静态规划的路径,车辆在行走过程中同时需要对每辆小车进行锁格的交通管制,来保证车辆不会相撞。
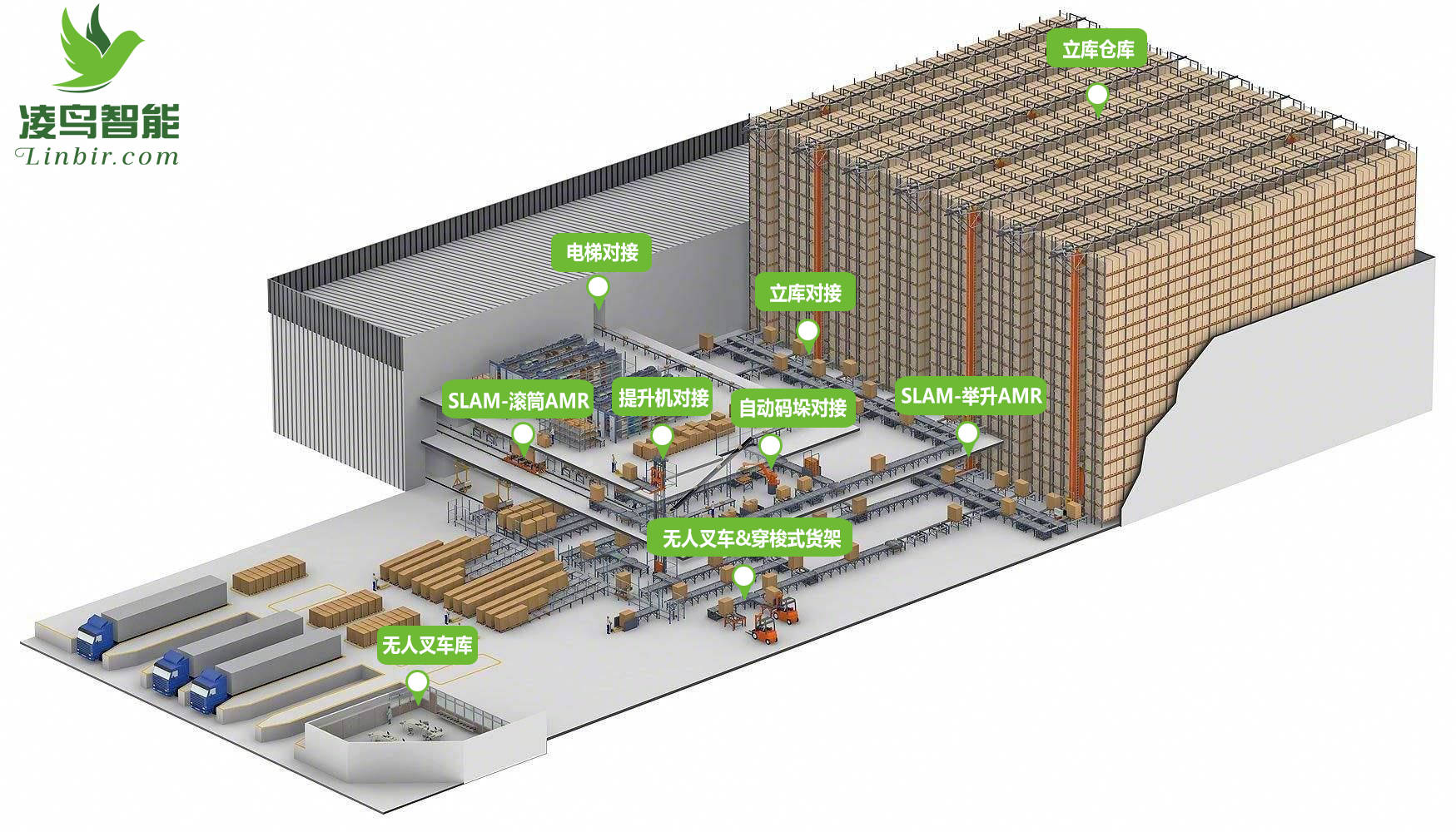
 AGV小车
AGV小车
企业必须认识到,过去靠劳动密集型低端产业获得原始积累的老路子已经走到头了,依靠各种创新,才是制造业的唯一出路。但是抱着“别人有我也有”的思路去上马AGV物流项目,失败是必然的,“有”和“有用”有着天壤之别,一定要在创新的基础上,响应用户自身的需求。如用途、场地、成本、产品档次等情况。
合理规划AGV小车路径,减少交通堵塞问题,一个良好的路径规划,不但可以使多台AGV小车降低道路堵塞的风险,还可以让物流系统更加顺畅,搬运效率更高。
审核编辑 黄宇
-
AGV
+关注
关注
27文章
1372浏览量
41469 -
AGV小车
+关注
关注
4文章
174浏览量
11261
发布评论请先 登录
相关推荐
AGV监控与任务管理系统设计
智能工厂AGV引入需要注意的一些地方
AGV小车的工作原理是什么?
AGV在仓储物流中的应用

AGV智能无人搬运车如何实现自动化运作

科技驱动的智能仓储:AMR与AGV的无缝结合
告别人工搬运,AGV仓储物流已起飞!
凌科DH系列连接器在AGV仓储机器人上的优势分析
从平库到立库:AGV驱动下的仓储转型升级

智能调度 多台AGV为什么不会撞在一起?
AGV的四点关键技术,你都了解吗?

AGV系统设计解析:布局-车体-对接-数量计算-路径规划

产线AGV和仓储AGV到底有什么不同?
智慧仓储AGV远程监控管理系统解决方案
AGV与智能仓储系统集成的实践与优化





 工商网监
工商网监
评论