 荣威RX5 MAX版智驾域控制器拆解分析
荣威RX5 MAX版智驾域控制器拆解分析

上汽荣威RX5 MAX版域控制器的设计方案是上汽与TTTech的合资公司创时智驾。荣威RX5 MAX拥有3个毫米波雷达、6个全高清摄像头和12个超声波雷达。
#01 智能驾驶域控制器外观结构
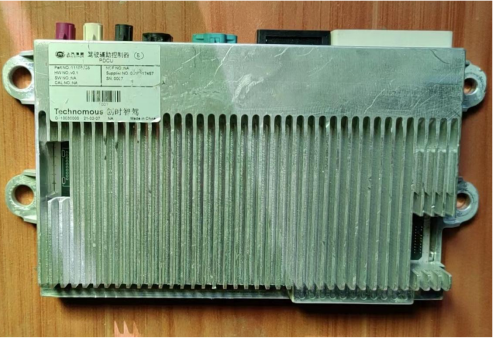
自驾域控制器外壳正面图
自驾域控制器外壳背面图
#02 智能驾驶域控制器接口

上图为创时智驾域控制器电源、CAN、GPIO和千兆以太网端子接口图

上图为创时智驾摄像头和天线端子图
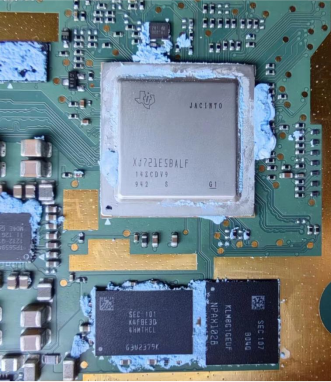
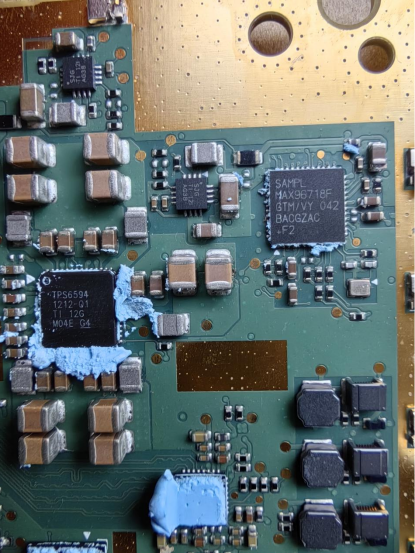
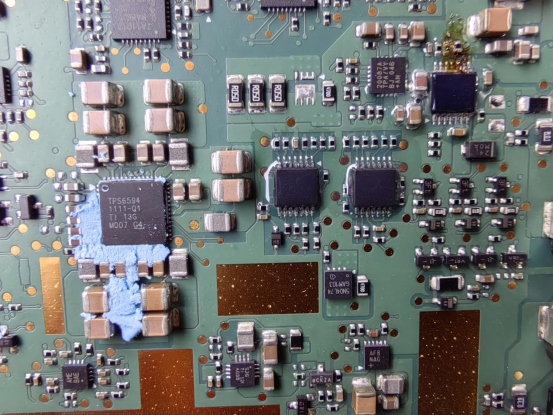
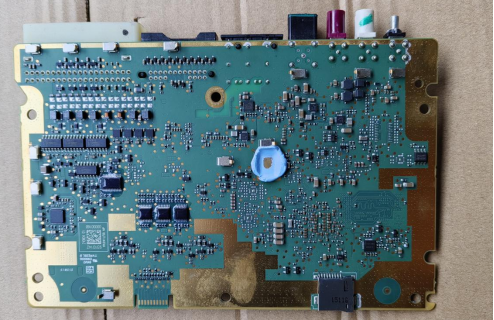
#03 智能驾驶域控制器PCB板
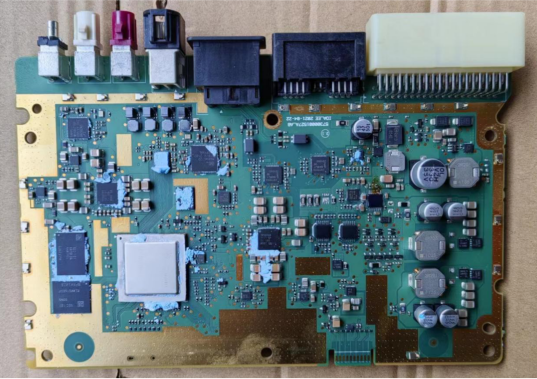
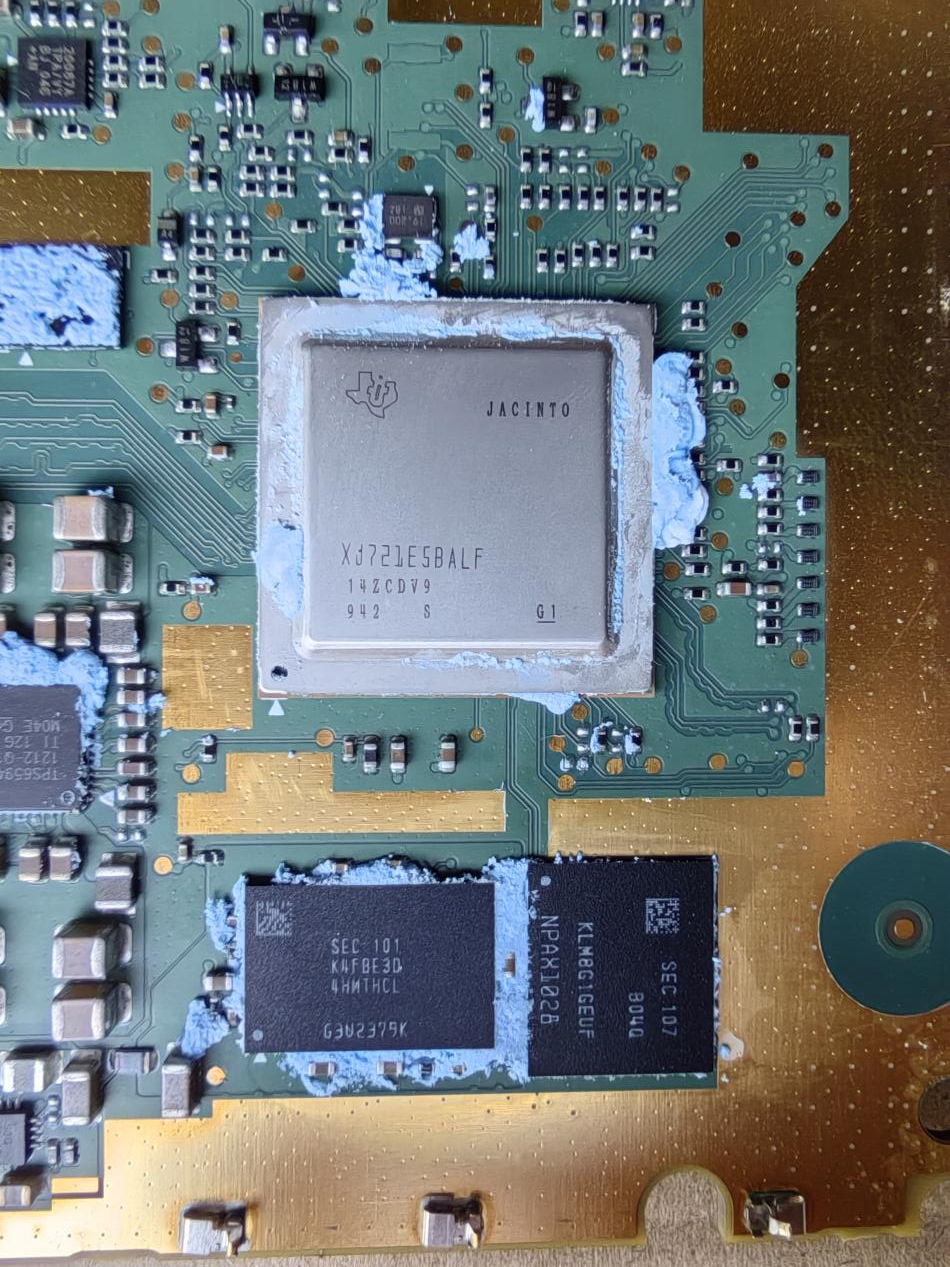
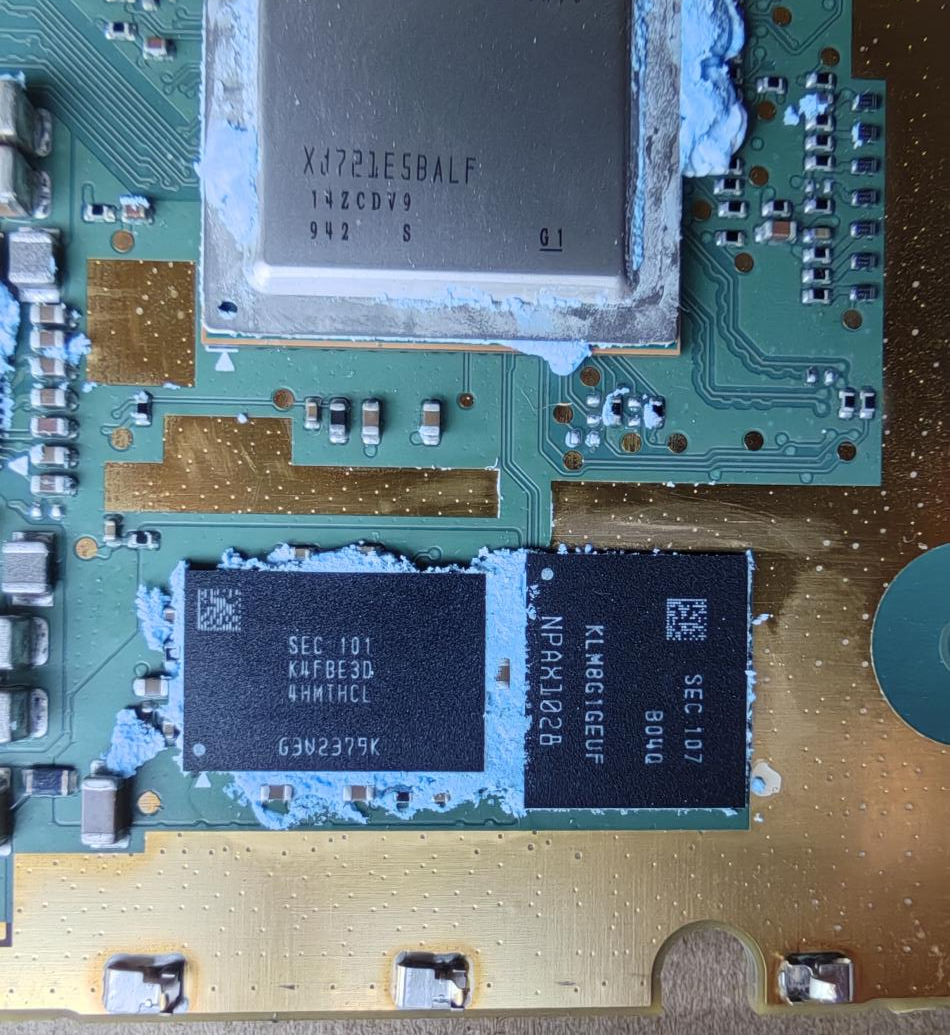
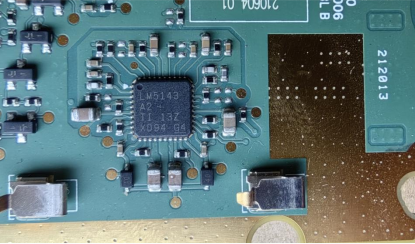
PCB正面图
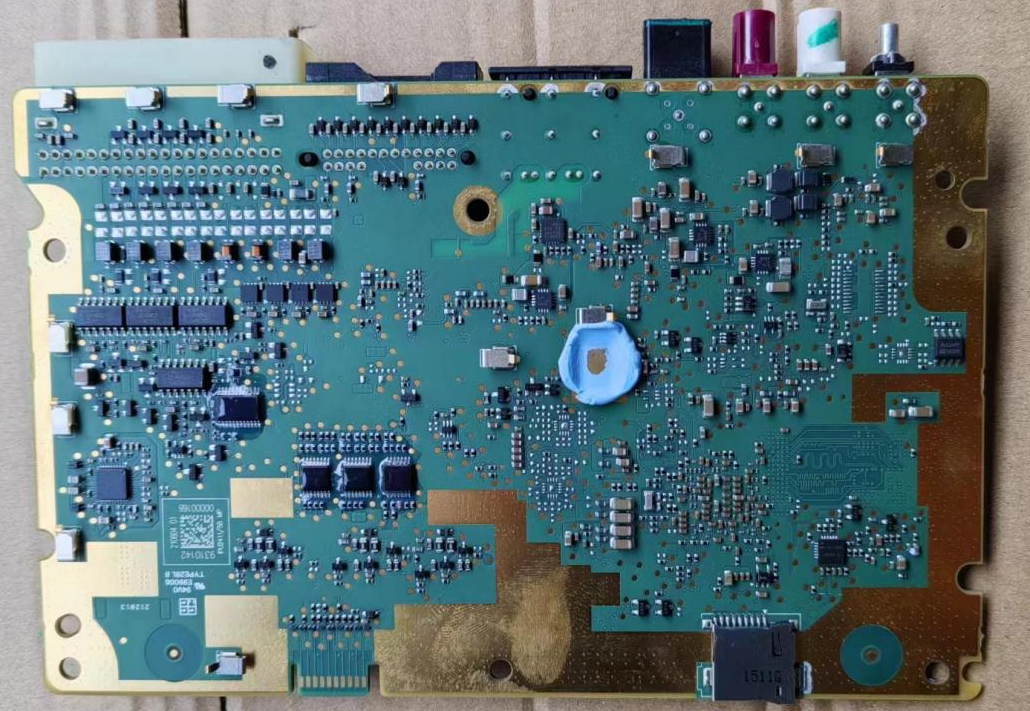
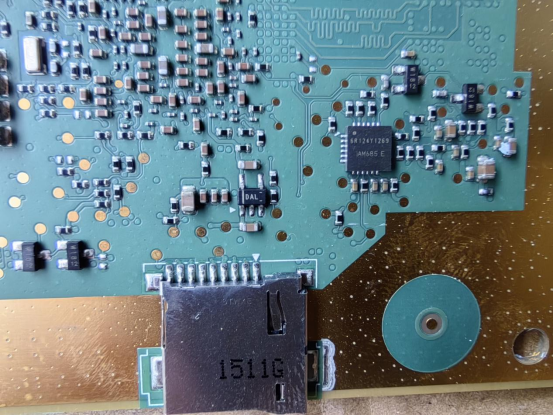
PCB背面图
#04 智驾域控制器系统组成
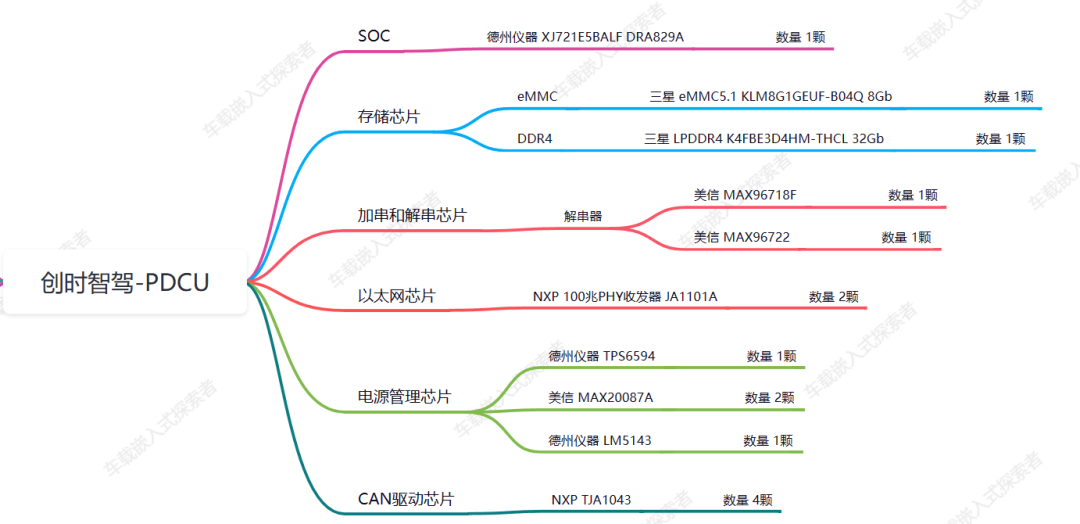
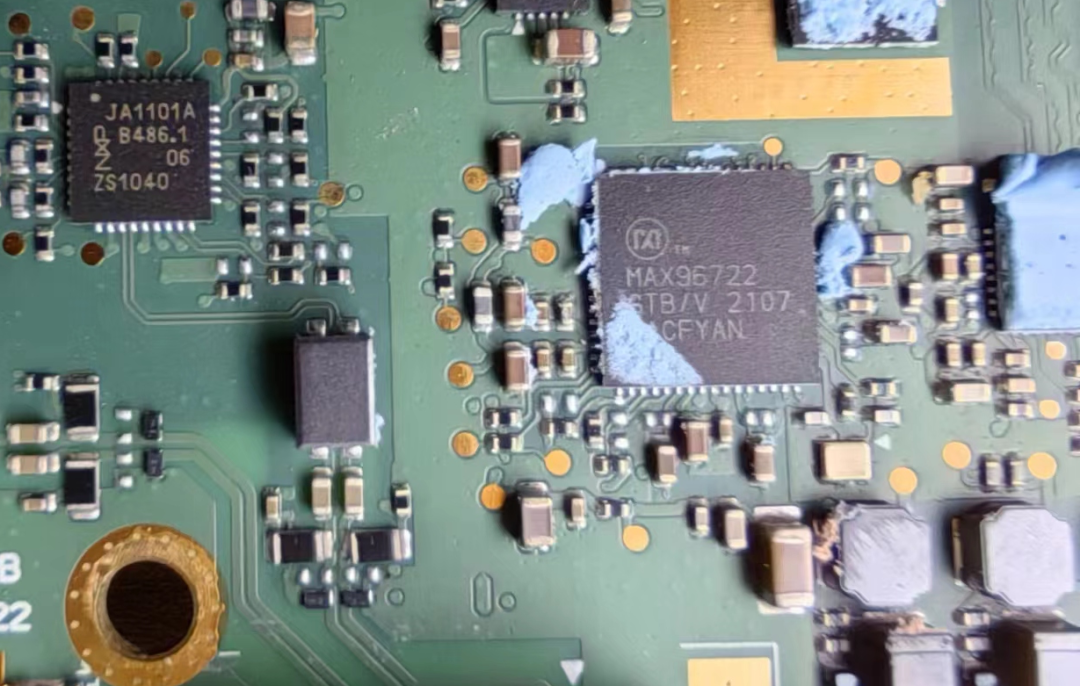
创时智驾此款域控制器采用了1颗德州仪器的DRA829作为主控SOC,负责感知、规划等算法实现载体;存储芯片由1颗三星的EMMC芯片和1颗DDR4芯片组成;解串器采用了1颗美信的MAX96718和MAX96722;以太网芯片采用的是恩智浦的JA1101A;电源管理芯片采用的是1颗德州仪器TPS6594、2颗美信MAX20087和1颗德州仪器LM5143;CAN总线驱动芯片采用的是恩智浦的TJA1043。下面将详细解释各芯片的特征及作用。
4.1、SOC芯片
4.1.1、DRV829简介
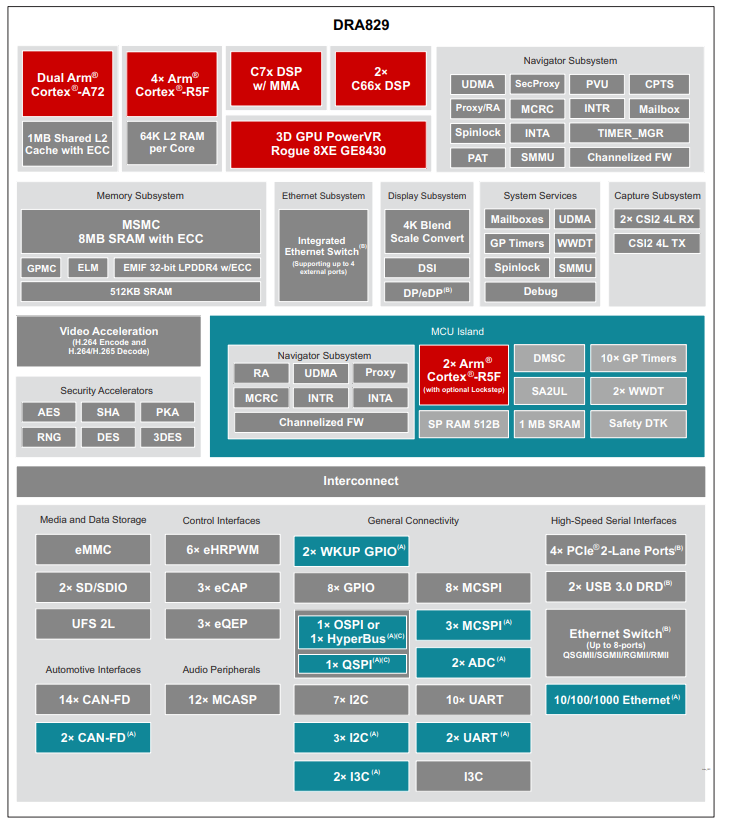
DRV829 处理器是基于不断发展的 Jacinto 7 架构,面向 ADAS 和自动驾驶车辆 (AV) 应用,基于 TI 在 ADAS 处理器市场上十多年的先进地位所积累的广泛市场知识而构建。在以符合功能安全标准为目标的架构中,独特的 高性能计算、深度学习引擎、信号和图像处理专用加速器的组合使DRA829 器件非常适合多种工业应用,例如:机器人、机器视觉、雷达等等。DRA829 以业界卓越的功耗/性能比为传统和深度学习算法提供高性能计算,并具 有很高的系统集成度,从而使支持集中式 ECU 或独立传感器中多种传感器模式的高级汽车平台实现可扩展性和更 低的成本。关键内核包括具有标量和矢量内核的下一代 DSP、专用深度学习和传统算法加速器、用于通用计算的 最新 Arm 和 GPU 处理器、集成式下一代成像子系统(ISP)、视频编解码器、以太网集线器以及隔离式 MCU 岛。所有这些都由汽车级安全硬件加速器提供保护。
4.1.2、DRA829在域控制器中的作用
①、感知处理:DRA829通过集成的高性能处理器和数字信号处理器(DSP)可实现多传感器数据的实时处理和融合,用于目标检测、目标识别、车道偏离警告、行人识别等功能。它可以处理来自相机、毫米波雷达、超声波传感器等多种传感器的数据。
②、数据传输和存储:DRA829具备高速数据传输和存储能力,支持多通道高速数据接口如Ethernet、USB、CAN等,用于实时接收和传输传感器数据。此外,TDA4还支持高容量存储设备,可以保存大量的车载数据以进行离线分析和后处理。
③、决策与规划:DRA829配备了高性能的人工智能处理器,可以进行实时的决策与规划。它可以通过深度学习模型对环境进行预测和分析,生成安全、高效的路径规划和动态决策,以实现自动驾驶车辆的导航和行驶控制。
④、安全性保障:DRA829具备多重安全机制,包括硬件加密、蜂窝通信安全、系统完整性检查等功能。它可以确保敏感数据的安全传输和存储,提升自动驾驶系统的安全性能。
4.1.3、特点
| 处理器内核: |
• C7x 浮点矢量 DSP,性能高达 1.0GHz、 80GFLOPS、256GOPS • 深度学习矩阵乘法加速器 (MMA),性能高达 8TOPS (8b)(频率为 1.0GHz) • 具有图像信号处理器 (ISP) 和多个视觉辅助加速器的视觉处理加速器 (VPAC) • 深度和运动处理加速器 (DMPAC) • 双核 64 位 Arm Cortex-A72 微处理器子系统,性能高达 2.0GHz – 每个双核 Cortex-A72 集群具有 1MB L2 共享缓存 – 每个 Cortex-A72 内核具有 32KB L1 数据缓存和 48KB L1 指令缓存 • 六个 Arm Cortex-R5F MCU,性能高达 1.0GHz – 16K 指令缓存,16K 数据缓存,64K L2 TCM – 隔离 MCU 子系统中有两个 Arm Cortex-R5F MCU – 通用计算分区中有四个 Arm Cortex-R5F MCU • 两个 C66x 浮点 DSP,性能高达 1.35GHz、 40GFLOPS、160GOPS • 3D GPU PowerVR Rogue 8XE GE8430,性能高达 750MHz、96GFLOPS、6Gpix/s |
| 存储器子系统: |
• 高达 8MB 的片上 L3 RAM(具有 ECC 和一致性) – ECC 错误保护 – 共享一致性缓存 – 支持内部 DMA 引擎 • 外部存储器接口 (EMIF) 模块(具有 ECC) – 支持 LPDDR4 存储器类型 – 支持高达 3733MT/s 的速度 – 具有内联 ECC 的 32 位数据总线,数据速率高达 14.9GB/s • 通用存储器控制器 (GPMC) • 主域中的 512KB 片上 SRAM,受 ECC 保护 |
| 功能安全: |
• 以符合功能安全标准为目标(在部分器件型号上) – 专为功能安全应用开发 – 文档有助于使 ISO 26262 功能安全系统设计满足 ASIL-D/SIL-3 要求 – 系统功能符合 ASIL-D/SIL-3 要求 – 对于 MCU 域,硬件完整性符合 ASIL-D/SIL-3 要求 – 对于主域,硬件完整性符合 ASIL-B/SIL-2 要求 – 安全相关认证 • 计划通过的 ISO 26262 认证 • 符合 AEC-Q100 标准(以 Q1 结尾的器件型号) |
| 高速串行接口 |
• 集成以太网交换机支持 (总共 8 个外部端口) – 多达 8 个 2.5Gb SGMII – 多达 8 个 RMII (10/100) 或 RGMII (10/100/1000) – 多达 2 个 QSGMII • 最多四个 PCI-Express (PCIe) 第 3 代控制器 – 每个控制器多达 2 个通道 – 第 1 代 (2.5GT/s)、第 2 代 (5.0GT/s) 和第 3 代 (8.0GT/s) 运行,具有自动协商功能 • 2 个 USB 3.0 双重角色器件 (DRD) 子系统 – 2 个增强型 SuperSpeed 第 1 代端口 – 每个端口都支持 Type-C 开关 – 每个端口均可独立配置为 USB 主机、USB 外设 或 USB DRD |
| 汽车接口: |
• 16 个模块化控制器局域网 (MCAN) 模块,具有完整的 CAN-FD 支持 • 2 个 CSI2.0 4L RX 和 1 个 CSI2.0 4L TX – 每个通道具有 2.5Gbps RX 吞吐量(吞吐量总共为 20Gbps) |
| 显示子系统: |
• 1 个 eDP/DP 接口,具有多显示器支持 (MST) – HDCP1.4/HDCP2.2 高带宽数字内容保护 • 1 个 DSI TX(高达 2.5K) • 多达 2 个 DPI |
| 音频接口: | • 12 个多通道音频串行端口 (MCASP) 模块 |
| 视频加速: |
• 超高清视频,1(3840 × 2160p,60fps)或 2 (3840 × 2160p,30fps)H.264/H.265 解码 • 全高清视频,4(1920 × 1080p,60fps)或 8 (1920 × 1080p,30fps)H.264/H.265 解码 • 全高清视频,1(1920 × 1080p,60fps)或高达 3 (1920 × 1080p,30fps)H.264 编码 |
框图
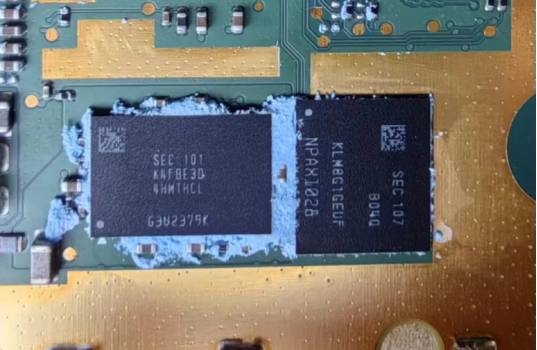
4.2、存储芯片
4.2.1、LDDR4-K4FBE3D4HM
K4FBE3D4HM简介
存储容量大小:32GB
读写速度:4266 Mbps
作用:
①、LPDDR4可提供快速的存储访问速度和高带宽,自动驾驶系统需要实时地感知和分析车辆周围的环境数据,包括图像、雷达数据等。LPDDR4的高速读写能力可以加快数据在存储器和处理器之间的传输速度,从而提高系统的响应速度和实时性能。
②、LPDDR4具有低功耗的特点。自动驾驶系统需要长时间稳定运行,且通常在嵌入式环境中工作,散热和功耗控制是必不可少的考虑因素。LPDDR4的低功耗设计可以减少控制器的能耗,延长电池寿命,并减少散热问题,提高系统的稳定性和可靠性。
③、LPDDR4支持高密度存储和大容量内存,自动驾驶系统需要存储和管理大量的地图数据、车辆状态数据、历史控制信息等。LPDDR4的高密度存储能力可以满足这些需求,并保证数据的高速读写和处理性能。
特点
|
•双数据速率架构;每个时钟周期两次数据传输 •双向数据选通器(DQS_t、DQS_c),与接收器捕获数据时使用的数据一起发送/接收 •差分时钟输入(CK_t和CK_c) •差分数据选通器(DQS_t和DQS_c) •输入正CK边的命令和地址;DQS的两个边缘参考的数据和数据掩码 •每个模具2个通道组成 •每个通道8个内部银行 •DMI引脚:正常写入和读取操作时的DBI(数据总线反转),DBI关闭时用于屏蔽写入的数据屏蔽(DM) -DBI打开时屏蔽写入的DQ 1的计数# •突发长度:16,32(OTF) •突发类型:连续 •读写延迟:请参阅表64 LPDDR4 AC时序表 •每个突发访问的自动预充电选项 •可配置的驱动强度 •刷新和自刷新模式 •部分阵列自刷新和温度补偿自刷新 •写入调配 •CA校准 •内部VREF和VREF培训 •基于FIFO的写/读训练 •MPC(多用途指挥) •LVSTL(低压摆动端接逻辑)IO •VDD1/VDD2/VDDQ:1.8V/1.1V/1.1V •VSSQ终端 •无DLL:CK到DQS不同步 •边缘对齐的数据输出,数据输入中心对齐的写入训练 •刷新率:3.9us |
4.2.2、eMMC KLM8G1GETF
KLM8G1GETF-B041简介
存储容量大小:64GB
作用:
①、此EMMC芯片是用于存储控制器的固件和操作系统的主要介质之一。主控制器的固件和操作系统会被烧录到EMMC芯片中,以便在启动时从芯片中加载。这样可以确保系统的稳定性和一致性,并使控制器能够快速启动。
②、EMMC芯片还负责存储和管理控制器中的运行代码。自动驾驶控制器需要处理大量的数据和复杂的算法,运行的程序对于实时性和性能要求非常高。EMMC芯片提供了快速的数据读取和写入速度,可以有效地执行控制器的运行代码,并确保控制器的正常运作。
③、EMMC芯片还用于存储和管理控制器的数据。自动驾驶系统需要实时记录并存储多种传感器数据、地图数据和其他重要数据,以支持实时决策和改进算法。EMMC芯片提供了大容量的存储空间和高速度的数据读写能力,能够满足自动驾驶控制器对数据存储的要求
4.3、加串/解串芯片芯片
4.3.1、美信MAX96722
简介
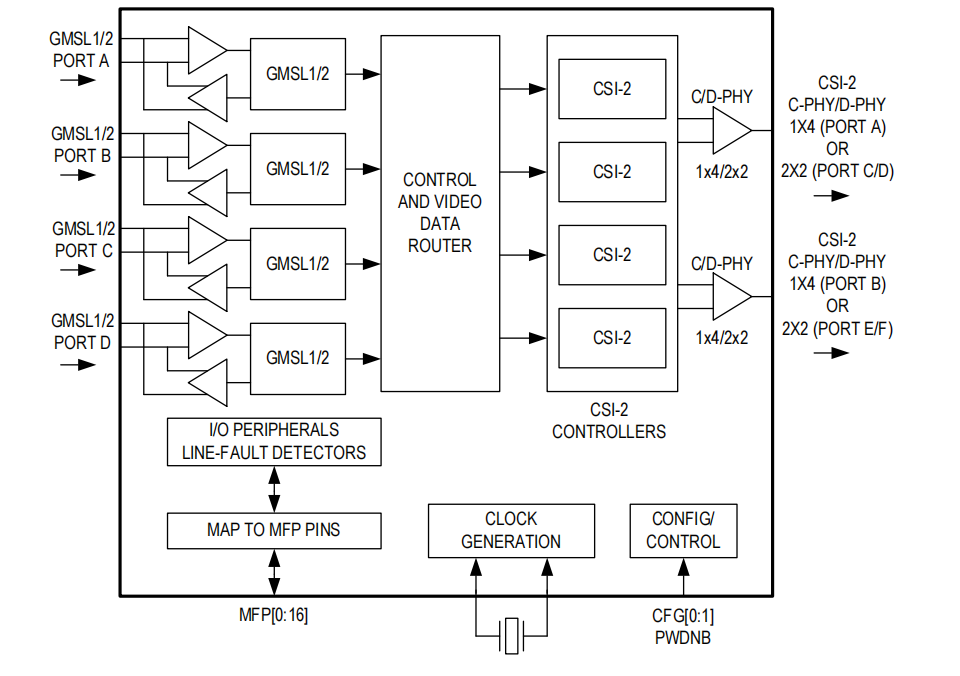
MAX96722解串器将GMSL2或GMSL1串行输入转换为MIPI CSI-2 D-PHY或C-PHY格式的输出。该设备允许每个链路在进行前向视频传输时同时传输双向控制信道数据。MAX96722可以使用行业标准同轴电缆或STP互连来容纳多达四个远程传感器。每个GMSL2串行链路在正向方向上以3Gbps和在反向方向上以187.5Mbps的固定速率操作。在GMSL1模式下,MAX96722可以与第一代3.12Gbps或1.5Gbps的GMSL1串行器配对,或者与GMSL1中的GMSL2串行器进行高达3.12Gbps的运算模式。
MAX96722支持视频数据的聚合和复制,使来自多个远程传感器的流能够组合并路由到一个或多个可用的CSI-2输出。数据也可以基于虚拟信道ID进行路由,从而使来自单个GMSL输入的多个流能够独立地路由到不同的CSI-2输出。或者,可以使用帧级联将来自多个传感器的数据同步并组合在复合超帧内的单个CSI-2流中。CSI-2接口支持使用C-PHY或D-PHY的2x4通道和4x2通道配置。
特点
| MIPI CSI-2 v1.3输出可配置为2x4通道,1x4车道+2x2车道,或4x2车道 |
•可选D-PHY v1.2,80Mbps-2.5Gbps/Lane或C-PHY v1.0,182Mbps-5.7Gbps-Lane •16/32信道虚拟信道支持(D/C-PHY) •传入数据的灵活聚合和路由通过CSI-2 VC或帧级联 •数据可以复制并路由到任何CSI端口 •支持RAW8/10/12/16/20、RGB565/666/ 888,YUV422 8-/10位格式 •提高传输效率的双像素模式 •CSI-2车道重新分配和极性翻转 •MIPI/GMSL视频PRBS生成器和检查器 •棋盘格/颜色渐变图案生成器 •原始CSI-2 PRBS生成器 •独立配置所有视频路径和GMSL/CSI-2端口 |
| 可独立配置的四路GMSL输入GMSL1/2操作、链路速度和视频格式 |
•混合GMSL1/GMSL2支持 •向后兼容GMSL1串行器 •GMSL1前向链路速度高达3.12Gbps •3Gbps的GMSL2链路速度(前向)和 187.5Mbps(反向) •同步和同时支持 非同步摄像机 •实现多个的精确同步 大型相机系统的串行器 •用于链路测试的GMSL PRBS生成器/检查器 •用于连续诊断的睁眼监视器 •自适应均衡,最多可实现15米同轴 带多个直列连接器的电缆 •兼容50Ω同轴电缆或100ΩSTP |
| 兼容ASIL-B(GMSL2) |
•视频水印插入和检测 •控制信道数据的16位CRC保护 检测到错误后重新传输 •视频线路数据的可选32位CRC保护 •视频数据存储器的ECC保护 •CSI-2数据流的CRC保护 |
| 用于设备配置的并发控制通道以及与远程外围设备通信 |
•3个I2C/UART、2个SPI、17个GPIO •八个硬件可选设备地址 |
| 可编程扩频降低EMI | |
| GMSL链路的线路故障监测 | |
| 64引线9 x 9mm TQFN,带外露焊盘 |
框图
4.3.2、美信MAX96718
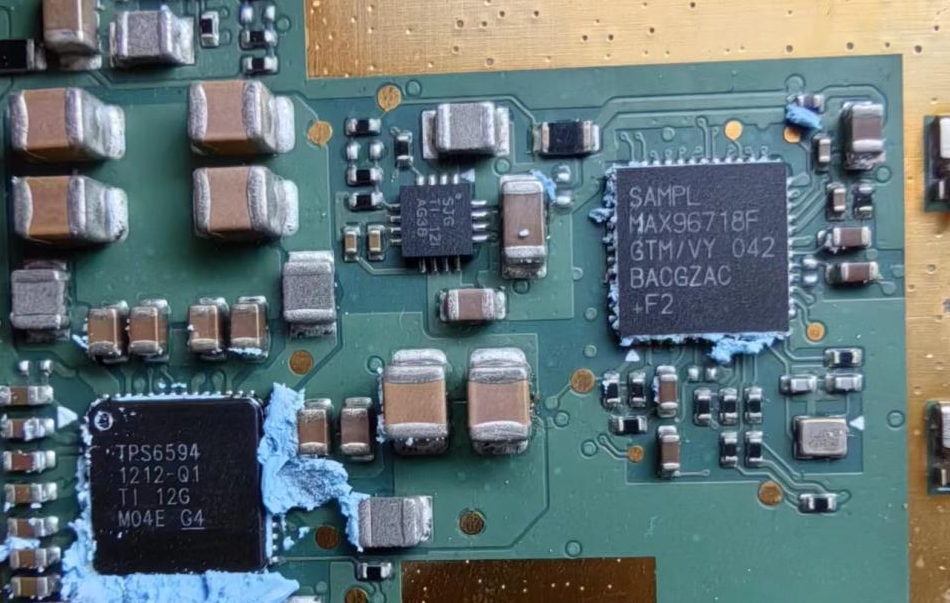
与MAX96722性能相似,未找到详细芯片手册!
4.4、以太网/交换机芯片
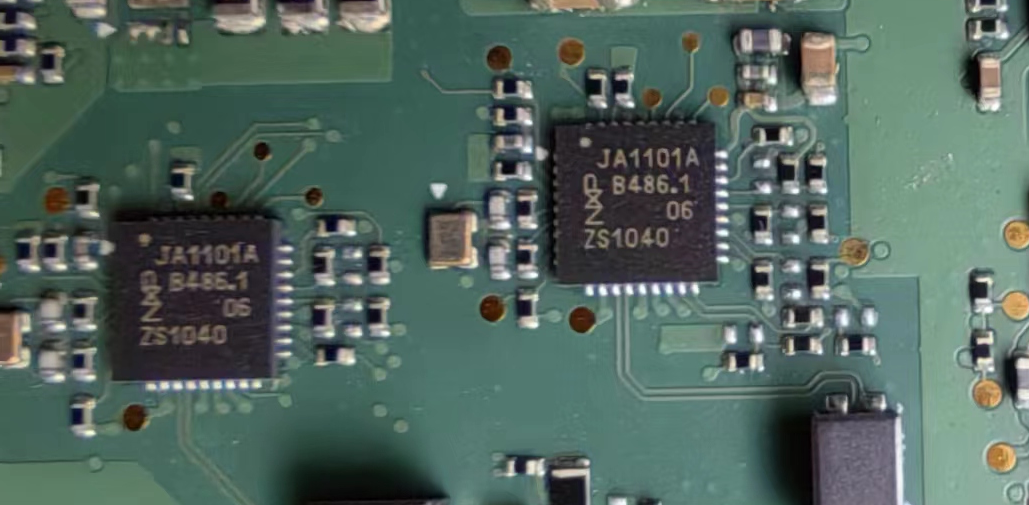
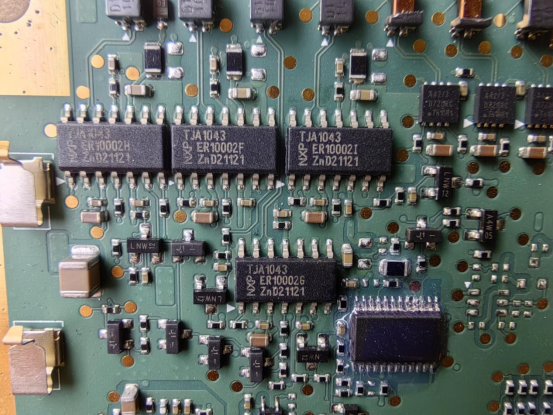
TJA1101简介
TJA1101是一款符合100BASE-T1标准的以太网PHY,专为网关、IP摄像头链路、驾驶员辅助系统和骨干网络等汽车用例而优化。该设备通过两条非屏蔽双绞线提供100Mbit/s的传输和接收能力,支持至少15m的电缆长度。
TJA1101专为汽车坚固性和ISO 26262,ASIL Acompliance而设计,同时将功耗和系统成本降至最低。由于符合ASIL-A标准,已经实施了足够的安全功能,以确保在系统级别满足ASIL要求。
特点
| 功能概述 | 特点 |
| 常规 |
•100BASE-T1 PHY •总线的MII和RMII兼容接口 •适用于PCB空间受限应用的紧凑型HVQFN 36引脚封装(6×6 mm) •ISO 26262,符合ASIL-A |
| 针对汽车用例进行了优化 |
•变送器经过优化,可与非屏蔽双绞线进行电容耦合 •自适应接收均衡器针对至少15米的汽车电缆长度进行了优化 •增强集成PAM-3脉冲整形,实现低射频发射 •EMC针对MII和RMII优化了输出驱动程序强度 •MDI引脚防ESD至±6 kV HBM和±8 kV IEC61000-4-2 •MDI引脚可防止汽车环境中的瞬态 •MDI引脚不需要外部过滤或ESD保护 •汽车级温度范围为-40°C至+125°C •符合AEC-Q100标准的汽车产品鉴定 |
| 低功率模式 |
•专用PHY启用/禁用输入引脚,以最大限度地减少功耗 •抑制电压调节器控制的输出 •符合开放联盟的唤醒概念(全球唤醒支持) –通过总线进行强大的远程唤醒检测 –PHY级别的唤醒转发 •符合开放联盟的睡眠概念 •本地唤醒引脚 •通过SMI访问唤醒 |
| 诊断功能 |
•实时监控链路稳定性和传输数据质量 •电缆故障诊断(短路和开路) •无间隙电源欠压检测,具有故障静音行为 •用于诊断的内部、外部和远程环回模式 |
| 其它 |
•反向MII模式,用于两个PHY的背靠背连接 •提供3.3 V单电源操作的片上稳压器 •支持数字核心的可选1.8 V外部电源 •差分电缆对的片上终端电阻器 •支持高达16 kB的巨型机架 |
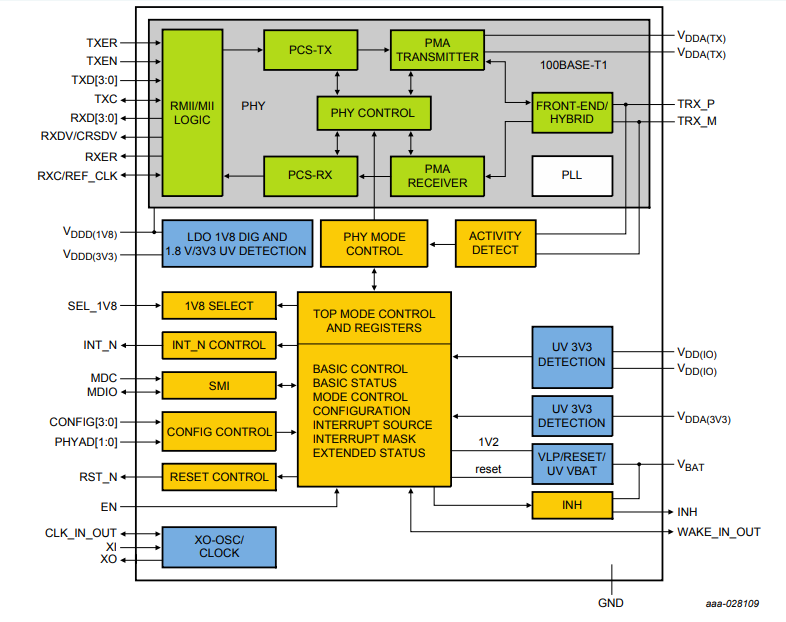
框图
TJA1101的框图如下图所示。100BASE-T1部分包含100BASE-T-1标准中规定的功能块,这些功能块构成了传输和接收信号路径的物理编码子层(PCS)和物理介质附件(PMA)层。MII/RMII接口(包括串行管理接口(SMI))符合IEEE802.3第22条。
为模式控制、寄存器配置、中断控制、系统配置、复位控制、本地唤醒、远程唤醒、欠电压检测和配置控制定义了附加块。定义了许多与电源相关的功能块:用于数字核心的内部1.8V调节器、用于睡眠模式的极低功率(VLP)电源、复位电路、电源监控和禁止控制。
PHY的操作所需的时钟信号在PLL块中生成,从外部晶体或振荡器输入信号导出。
引脚捆扎允许许多默认PHY设置(例如,主或从配置)在通电时进行硬件配置。
4.5、电源管理芯片
4.5.1、TPS6594
TPS6594-Q1具有5个降压转换器和4个LDO且适用于汽车安全相关应用的电源管理IC。
特点
| 特点 | 功能 |
| 符合汽车应用要求,具有符合 AEC-Q100 标准的下列特性 |
– 器件的输入电源电压范围为 3V 至5.5V – 器件温度等级1:–40°C 至+125°C 环境工作 温度范围 – 器件HBM 分类等级2 – 器件CDM 分类等级C4A |
| 符合功能安全标准 |
– 专为功能安全应用开发 – 有助于使 ISO 26262 系统设计符合 ASIL-D 的文 档 – 有助于使IEC 61508 系统设计符合 SIL-3 的文 档 – 系统功能符合ASIL-D – 硬件完整性符合 ASIL-D – 输入电源电压监测和过压保护 – 所有输出电源轨上的欠压/过压监测和过流监测 – 具有可选触发/Q&A 模式的看门狗 – 具有可选级别/PWM 模式的两个错误信号监测 (ESM) – 具有高温警告和热关断功能的温度监测 – 对内部配置寄存器和非易失性存储器(NVM) 的 位完整性(CRC) 错误检测 |
| 低功耗 |
– 2μA 典型关断电流 – 仅备用电源模式下的典型值为7μA – 低功耗待机模式下的典型值为20μA |
| 五个开关模式电源降压稳压器: |
– 输出电压范围:0.3V 至3.34V(电压阶跃为 5mV、10mV 或20mV) – 输出电流:其中一个是4A,另外三个是3.5A, 还有一个是2A – 四个降压稳压器的灵活多相功能:单轨的输出电 流高达14A – 短路和过流保护 – 内部软启动可限制浪涌电流 – 开关频率为2.2MHz/4.4MHz – 可与外部时钟输入同步 |
| 三个具有可配置旁路模式的低压降 (LDO) 线性稳压器 |
– 线性稳压模式下的输出电压范围:0.6V 至3.3V (电压阶跃为50mV) – 旁路模式下的输出电压范围:1.7V 至3.3V – 500 mA 输出电流,具有短路和过流保护 |
| 一个具有低噪声的低压降 (LDO) 线性稳压器 |
– 输出电压范围:1.2V 至3.3V(电压阶跃为 25mV) – 300mA 输出电流,具有短路和过流保护 |
| 非易失性存储器 (NVM) 中的可配置电源序列控制: |
– 可配置的电源状态间上电和断电序列 – 电源序列中可包括数字输出信号 – 数字输入信号可用于触发电源序列转换 – 可配置的安全相关错误处理 |
|
• 32kHz 晶体振荡器,可输出缓冲式32kHz 时钟输出 • 具有警报和定期唤醒机制的实时时钟(RTC) • 具有一个SPI 或两个I2C 控制接口,且第二个I2C接口专用于Q&A 看门狗通信 |
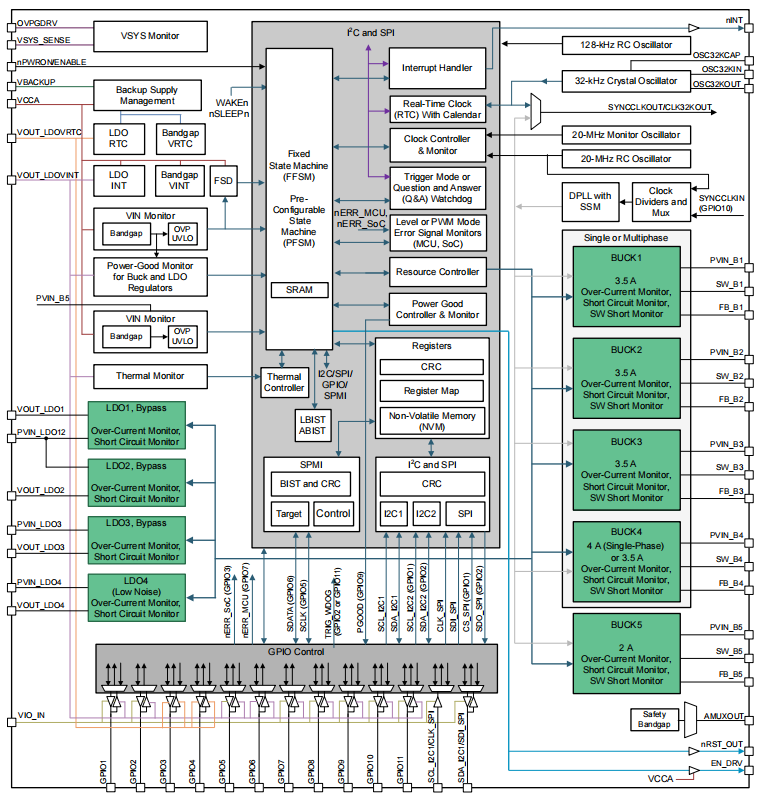
功能框图
4.5.2、MAX20087
MAX20087简介
双/四通道摄像机电源保护器;业界唯一的ASIL级摄像机保护器,通过I2C提供诊断。美信旗下共有4款相机电源诊断芯片:MAX20086、MAX20087、MAX20088、MAX20089。
MAX20086–MAX20089双/四摄像头功率探测器IC为四个输出通道中的每个通道提供高达600mA的负载电流。每个输出都单独保护ed免受对蓄电池短路、对地短路和过电流情况的影响。IC在3V至5.5V电源和3V至15V摄像头电源下工作。在300mA时,输入到输出的电压降仅为110mV(典型值)。
IC提供启用输入和I2C接口,以读取设备的诊断状态。板载ADC能够读取通过每个开关的电流。符合ASIL B和ASIL D标准的版本支持读取另外七个诊断测量值 通过ADC,确保高故障覆盖率。
MAX20086–MAX20089分别包括每个输出通道上的超温停机和过电流限制。所有设备的设计环境温度为-40°C至+125°C。
特点
| 特点 | 功能 |
| 小方案尺寸 |
多达4个600mA保护开关 3V至15V输入电源电压 3V至5.5V器件工作电源 26V电池短路隔离 可调节限流值(100mA至600mA) 用于更高电流的并联多通道 可选I2C地址 小尺寸(4mm × 4mm)、20引脚SWTQFN和WETQFN封装 |
| 高精度 |
±8%限流精度 0.5ms软启动时间 0.25ms软关断时间 0.3µA关断电流 110mV压差@ 300mA |
| 专为安全应用设计 |
兼容ASIL B/D 短路诊断VBAT/GND 输出过压/欠压诊断 输入过压/欠压诊断 通过I2C读取各路8位电流、输出电压和供电读数 发生故障时自动重试 |
| AEC-Q100认证,-40°C至+125°C工作温度范围 |
4.5.2、MAX20087
#05 方案成本预估
| 芯片 | 价格 |
| DRA829 | 700 |
| 三星 eMMC5.1 KLM8G1GEUF | 18 |
| 三星LPDDR4K4FBE3D4HM | 100 |
| 美信 MAX96718F | 100 |
| 美信MAX96722 | 110 |
| NXP 100兆PHY收发器 JA1101A | 18*2 |
| 德州仪器TPS6594 | 80 |
| 美信 MAX20087A | 20*2 |
| NXP TJA1043 | 15*4 |
| 德州仪器 LM5143 | 50 |
此方案硬件成本在1500左右!
-
摄像头
+关注
关注
61文章
5130浏览量
103614 -
智能驾驶
+关注
关注
5文章
3073浏览量
51410 -
毫米波雷达
+关注
关注
110文章
1184浏览量
66457 -
域控制器
+关注
关注
0文章
293浏览量
3445
原文标题:荣威RX5 MAX版智驾域控制器拆解分析
文章出处:【微信号:eng2mot,微信公众号:汽车ECU开发】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
荣威RX5全方位解析,互联网汽车到底酷在哪
荣威RX5或将成为10-20万元SUV首选
首款互联网汽车曝光 荣威RX5纯电动
荣威rx5新车型正式上市,售价为15.88万元,荣威RX5, 20T自动互联网智尊版
荣威RX5、奥迪A5和陆风X2又推出哪几款新车
自主品牌的荣威RX5与合资品牌的本田CR-V展开厮杀搏斗,你会选择哪一方?
荣威RX5敞开了荣威RX系列SUV的簇新一页,那么荣威RX3会给大家带来什么惊喜呢?低价高配能否抢占哈弗H2市场?
深度解析上汽荣威RX5底盘

上汽荣威RX8 2.0T 四驱版上手体验评测
【汽车大PK】风光580/荣威RX5

上汽飞凡R7智联域控制器模块TBOX的拆解分析

荣威RX5智能驾驶域控制器方案




评论