 光学防抖技术解析
光学防抖技术解析
研究机构开发出具有最佳补偿效果的手抖动信号估测算法,以及运算负载低且易实作的模糊逻辑(Fuzzy Logic)控制器,可大幅提高手机镜头模块稳定度,并改善音圈马达的磁滞效应,将有助光学防抖技术扩大渗透手机市场。
光学防抖分两种技术
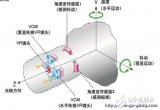
图1为具光学防抖功能之微型相机模块。防手抖系统最具代表的技术为电子防手抖(Electronic Image Stabilizer, EIS)与光学防抖技术。其中,电子防手抖技术利用图像处理的方式来防止影像模糊,电子防手抖效果取决于算法的设计与效率,系统不须增加额外的硬件,适合微型化设计,但通常必须牺牲影像的分辨率(或影像大小),此为其主要缺点。
图1影像传感器与光学防抖模块
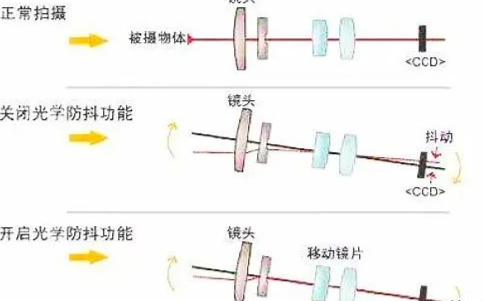
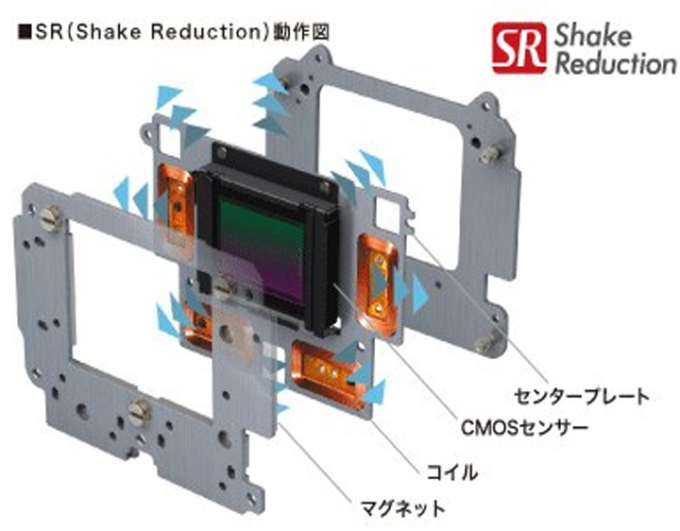
光学防抖技术又区分为传感器防手抖(Sensor-shift Optical Image Stabilization)与镜头防手抖(Lens-shift Optical Image Stabilization)两种(图2),光学防抖系统利用光学镜组(Lens)或影像传感器(Image Sensor)的移动来补偿使用者的手抖动,故不会牺牲影像的分辨率,大幅提升产品附加价值。

图2光学式防手抖系统示意图;(A)影像传感器移动之光学防抖系统;(B)镜头移动之光学防抖系统。
手抖动信号估测技术
光学防抖技术需要额外致动器设计,因此主要关键技术包括控制器设计与用户手部振动信号估测器设计。手抖动信号估测器算法,是利用智能手机搭载的MEMS惯性传感器感测使用者拍摄时手部产生的晃动信号,经由闭回路控制系统驱动微型相机模块内部精密音圈马达驱动,以补偿使用者手部产生的晃动,避免拍摄影像产生模糊。手抖动信号估测器包括惯性传感器(多轴陀螺仪及加速度计)与惯性传感信号处理算法设计。工研院南分院已投入惯性信号估测技术开发多年,并成功运用于行人/行车惯性导航、光学防抖系统中,有相当丰硕的成果。
手抖动信号估测器利用陀螺仪组件感测到手抖动信号后,经由数字信号处理及积分运算后可得到颤抖角度信号,经实验量测分析后,一般手部振动频率特性主要频带在2~12Hz之间,故信号处理算法亦针对该频带信号特性做滤波器设计,开发的算法系将惯性信号处理使用一阶低通滤波器与高通滤波器滤除高频噪声信号及低频的主动式信号(用户操作相机所产生的信号)。
低通与高通滤波器除可针对特定带宽的手抖信号做补偿外,并可避免滤波器对信号所造成的相位延迟,让信号处理算法与控制系统整合获得最佳补偿效果,使得防抖模块能达到预期效能。算法因考虑滤波器造成手抖动信号相位的变化,故以此所开发的适应性手抖动估测器,在宽带域范围可以获得精准的手抖动估测信号。图6为手抖动信号估测器方块图。

图3手抖动信号估测器方块图
光学防抖控制器设计
另一光学防抖系统关键技术为控制器设计,微型相机模块致动器大多采用音圈马达,但其具有磁滞效应、磨擦和参数时变等非线性特性,因此在控制器设计上必须考虑到非线性特性与实现时的运算负载。模糊逻辑控制器(Fuzzy Logic Controller)由于有运算负载低、不需要精确的受控系统数学模型、架构易实现并能有效的补偿微型致动器非线性等优点,近年来,工研院南分院所开发的光学防抖系统,成功地利用模糊控制器驱动音圈马达,藉以补偿经由手抖动信号估测器算法计算出来的位移补偿信号,达到防手抖效果。光学防抖系统如图4所示。

图4光学防抖系统方块图
防手抖效能验证
目前市面上的防手抖效能主要分为1~4级。一般而言,防手抖效能级数是以安全快门速度的倍率来估算,安全快门速度等于焦距长度分之一秒的快门时间,举例来说,如果镜头的焦距是40毫米(mm),那么安全快门的速度就是1/40秒,使用低于安全快门速度拍出清晰的影像,防手抖级数就是安全快门速度的倍率;如果以安全快门速度是1/40秒为例,防手抖效能四级即代表相机在(1/40)×2^4=1/2.5秒快门速度下仍然能拍下清晰的影像,而影像的清晰程度则可以藉由稳定率(Stabilization Rate, SR)小于-15dB或ISO-12233,来鉴别影像锐利度(Image Sharpness)。
其中,稳定率实验主要是光学防抖系统在振动补偿与无振动补偿情况下,由固定快门时间条件决定拍摄测试目标,由拍摄照片上影像振动像素(高度)的比值来评定防手抖效能,稳定率图示说明请参考图5所示。

图5防手抖稳定率定义图
OISOFF_S代表当光学防抖系统关闭且使用相机时,手产生抖动时所拍摄的影像像素(垂直高度);OISON_S代表当光学防抖系统开启,且手抖动产生时所拍摄的影像像素(垂直高度);OISOFF_NS代表当光学防抖系统关闭,且无手抖动产生时,即为OIS系统静止时拍摄的影像像素(垂直高度)。工研院南分院开发的适应性光学防抖系统已可达市售四级防手抖效能。
-
光学
+关注
关注
4文章
763浏览量
36516
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论