 麻省理工学院推出新型机器人训练模型
麻省理工学院推出新型机器人训练模型
近日,据TechCrunch报道,麻省理工学院的研究团队展示了一种创新的机器人训练模型,该模型突破了传统模仿学习方法的局限,不再依赖标准数据集,而是借鉴了大型语言模型(LLM)如GPT-4等所使用的大规模信息处理方式,为机器人学习新技能开辟了全新的道路。
传统的模仿学习方法中,机器人通过观察和模仿执行任务的人类或其他代理进行学习。然而,这种方法在面对诸如照明变化、不同环境或新障碍等小挑战时,往往因为缺乏足够的数据而难以适应。为了克服这一难题,麻省理工学院的研究团队探索了一种新的解决方案,他们借鉴了大型语言模型的强大数据处理能力,并引入了异构预训练变压器(HPT)这一创新架构。
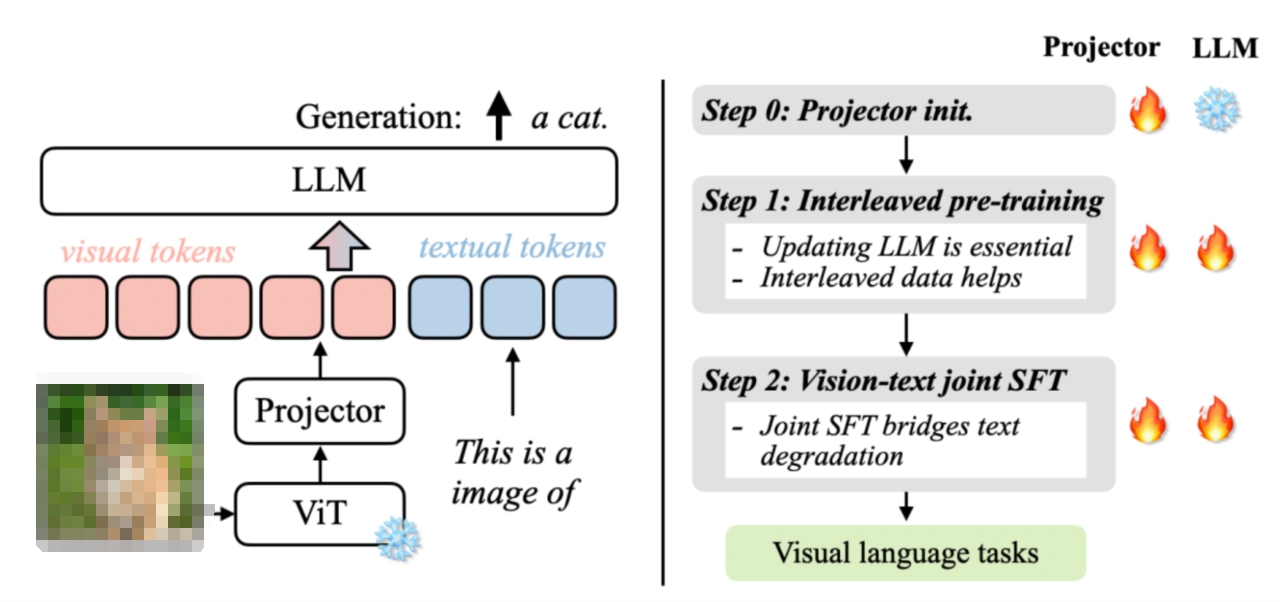
新论文的主要作者王立睿指出,与语言领域的数据以句子形式存在不同,机器人领域的数据具有高度的异质性。因此,如果想以类似语言模型的方式进行预训练,就需要构建一种全新的架构。HPT正是这样一种架构,它能够整合来自不同传感器和环境的多样信息,并利用变压器技术将这些数据汇总到训练模型中。值得注意的是,变压器的规模越大,其输出效果也越好。
在使用该新型训练模型时,用户只需输入机器人的设计、配置以及期望完成的任务,系统便能根据这些信息为机器人提供所需的技能。这一创新不仅提高了机器人学习的效率和灵活性,还为实现更广泛、更复杂的机器人应用奠定了坚实的基础。
卡内基梅隆大学副教授戴维·赫尔德对这项研究给予了高度评价。他表示,我们的梦想是拥有一个通用的机器人大脑,用户可以直接下载并使用它,而无需进行任何额外训练。虽然目前我们还处于这一愿景的早期阶段,但借助规模化的优势,我们有望在机器人策略方面取得像大型语言模型那样的突破性进展。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28800浏览量
209108 -
LLM
+关注
关注
0文章
306浏览量
454
发布评论请先 登录
相关推荐
江苏理工学院莅临汉得利BESTAR公司考察交流
2025年2月20日下午,江苏理工学院电气信息工程学院副院长陶为戈、王琪,管理学院教授谢德兵以及电气信息工程学院梁宝博士等学术代表团莅临汉得利BESTAR公司考察交流。校企双方围绕技术
麻省理工学院研发全新纳米级3D晶体管,突破性能极限
11月7日,有报道称,美国麻省理工学院的研究团队利用超薄半导体材料,成功开发出一种前所未有的纳米级3D晶体管。这款晶体管被誉为迄今为止最小的3D晶体管,其性能与功能不仅与现有的硅基晶体管相当,甚至在某些方面还超越了后者。
24M开发出新隔离膜可降低电动汽车电池火灾风险
Technologies,这家源自麻省理工学院的分拆公司,携手日本合作伙伴,共同推出了这款创新产品,并计划于2026年进行大规模市场推广。
VILA与其他模型在提供边缘AI 2.0方面的表现
VILA 是 NVIDIA 研究部门与麻省理工学院共同开发的高性能视觉语言模型系列。最大的模型约有 400 亿参数,最小的模型约有 30 亿参数,并且完全开源(包括
美国佐治亚理工学院一行莅临达实智能调研
近日,美国佐治亚理工学院“聚焦数据科学领域·深度探访粤港澳大湾区”学生代表团来深交流。美国佐治亚理工学院(Georgia Institute of Technology)一行探访了大湾区科技企业代表达实智能。
贵州理工学院采购南京大展的DZ-STA200同步热分析仪
理工学院采购了南京大展的DZ-STA200同步热分析仪,就是客户对于我们品牌产品的认可。DZ-STA200同步热分析仪作为集热重分析(TG)与差示扫描量热分析(DSC)

Al大模型机器人
理解能力强大: AI大模型机器人可以理解和生成自然语言,能够进行复杂的对话和语言任务。它们能够识别语言中的语义、语境和情感,并据此作出适当的回应。广泛的知识储备: 这些模型基于大规模的数据集进行
发表于 07-05 08:52
麻省理工学院研发RoboGrocery系统,杂货店自动化装袋新篇章
在科技日新月异的今天,自动化和智能化正逐渐渗透到我们生活的方方面面。近日,麻省理工学院计算机科学与人工智能实验室(CSAIL)的一项创新技术引起了广泛关注——RoboGrocery系统,该系统将计算机视觉与软机器人夹持器技术相结合,为杂货店自动化装袋过程带来了新的可能性。
感谢东莞理工学院对我司导热系数测试仪的认可
东莞理工学院作为国内的高等学府,一直致力于科学研究和教育事业的发展,能够得到这样一所学府的认可,无疑是对我们技术实力和产品质量的肯定。这份认可,如同春日里的一缕阳光,温暖而明亮,照亮了我们前行的道路

苏黎世联邦理工学院报告:Rowhammer攻击对高端RISC-V CPU的潜在风险
来源:内容由RISC-V国际人才培养认证中心编译自DRAMSec,作者:MicheleMarazzi;KavehRazavi。苏黎世联邦理工学院的研究人员发表了一篇题为“RISC-H:针对

指南车机器人携同南昌工学院参观南京熊猫电子
2024年4月10日上午,南京指南车机器人科技有限公司董事长刘增龙和南昌工学院副校长徐九南一行到南京熊猫电子装备园参观交流,南京熊猫电子装备有限公司副总经理陈飞陪同介绍。
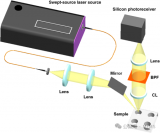
一种用于化学和生物材料识别的便携式拉曼光谱解决方案
基于扫频光源的紧凑型拉曼光谱系统:美国麻省理工学院(MIT)和韩国科学技术院(KAIST)的研究人员开发了一种用于化学和生物材料识别的便携式拉曼光谱解决方案,克服了光谱仪笨重的局限性。
麻省理工与Adobe新技术DMD提升图像生成速度
2023年3月27日,据传,新型文生图算法虽然使得图像生成无比逼真,但奈何运行速度较慢。近期,美国麻省理工学院联合Adobe推出新型DMD方法,仅略微牺牲图像质量就大幅度提高图像生成效率。
霍尼韦尔与南方泵业开展战略合作,四川成都一家红外热成像专用图像处理芯片服务商完成A+轮融资
传感新品 【麻省理工学院:研发出自供电传感器,可从环境中获取能量】 3 月 4 日消息,来自美国顶尖学府之一麻省理工学院的研究人员发明了一种无需电池、自供电,且不产生污染的传感器。 研究团队负责人

瑞士苏黎世联邦理工学院新型四足机器人单腿完成开关门、移动任务
据本周五出版的Popular Science杂志报道,近日瑞士苏黎世联邦理工学院机器人系统实验室的科研团队展示了新研究进展:他们训练了自家的机器狗,让其用单腿操控门锁和移动物品,同时依





 工商网监
工商网监
评论