 逻辑门电路的类别和性能参数
逻辑门电路的类别和性能参数

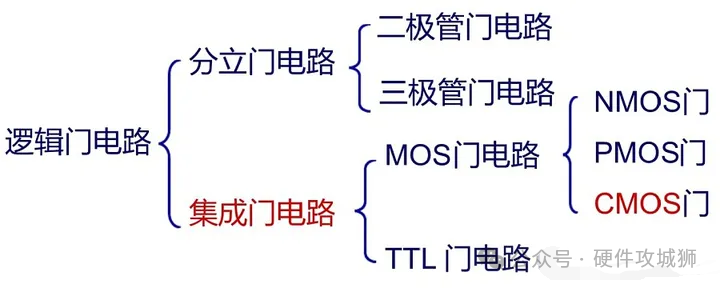
逻辑门电路的类别
除了分立元件逻辑门(二极管和晶体管),对于集成电路逻辑门大致可以分为两类:
绝缘栅场效应管CMOS集成逻辑门、双极型晶体管TTL集成逻辑门
CMOS与TTL比较:
②供电电压不一样,TTL常用5V供电,CMOS:5V、3.3V、2.4V、1.8V
③TTL抗干扰能力弱,噪声容限小,主要是因为CMOS逻辑电平范围宽,高电平阈值区间与低电平区间的距离大,抗干扰能力强;但CMOS器件输入阻抗大,容易捕捉干扰,噪声大。但CMOS输出阻抗低,在KΩ范围内;CMOS器件不用的输入引脚必须接地或者固定电平,(即注意静电防护)而TTL器件引脚悬空默认高电平。
④TTL功耗大,CMOS功耗低,静态功耗几乎没有,电平切换才有大电流。
⑤TTL器件工作速度快,传输延时5~10ns;cmos传输延时25~50ns。
集成逻辑门的性能参数
1、噪声容限:在工作过程中,输入端允许加入的干扰噪声大小
低电平噪声容限:正脉冲有影响
高电平噪声容限:负脉冲有影响
噪声容限越大,抗干扰能力越强
2、输入端负载特性
在电路的实际使用过程中,通常会在输入端和地之间加一个输入电阻,输入负载特性就是输入电压与输入电阻之间的关系
【注】CMOS输入端没有电流,输入电阻大小无所谓,无论多大电阻都不会改变输入本来的状态
3、平均传输延迟时间
由于晶体管的导通和截至都需要一定的时间,因此当集成逻辑门电路的输入信号发生变化时,输出信号的变化并不是立刻的,中间存在一定的延迟时间
平均传输延迟时间用tpd表示,是衡量门电路工作速度的重要指标,tpd越小,逻辑门电路的工作速度就越快
4、集成逻辑门器件的功耗
集成逻辑门器件的功耗是指在正常工作所消耗的功率,用PD表示
CMOS集成逻辑门的功耗相较于TTL逻辑门的功耗要低
扇入(fan-in)和扇出(fan-out)系数
扇入系数Ni :一个逻辑门电路所能允许的输入端数目的个数
扇入系数No:一个逻辑门电路所能驱动同类门电路的最大个数,扇出系数越大,表示门电路带负载能力越强
扇入与扇出系数反映了门电路的输入端数目和输出驱动能力的指标。
扇入越大越好,扇出越大越坏。在设计中,尽量减小扇出。对于一定扇出数的电路,电路的工作频率随之确定,一般工作频率越高,扇出数越小。
扇出系数(Fan-out)
扇出系数表达的是驱动能力,即带电路负载的能力,同时也指的是对于一个门电路来讲,它能带自己同样类型的门有多少个。
当输出达到IOH时是能带载的最大能力,由此计算扇出系数
当输出电流大于IOH,输出的高电平得不到保证
输出0时,带的负载门电流是往里流【灌电流】会抬高输出电压
输出1时,带的负载门电流是往外流【拉电流】会拉低输出电压
逻辑门输出高电平时的扇出系数NOH为:

逻辑门输出低电平时的扇出系数NOL为:

例:已知某门电路的电流参数为IOL(max) = 8mA,IIL(max) = 0.1mA,I
OH(MAX) = 0.4mA,IiH(max) =20uA,求可以带多少个同类门电路的输出
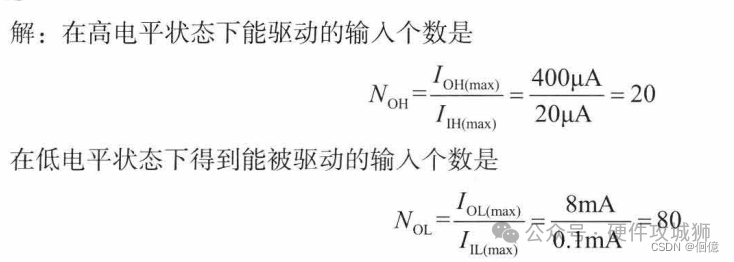
【注】在实际应用过程中如果高电平扇出系数和低电平系数不同,应采用较小的那个
NO=(NOL,NOH)min
例如TTL反相器,能够带TTL反相器个数数多少?
扇出系数取决于什么?由于TTL电路不管是高低电平电路,输入都是要取电流的。而TTL电路的输出存在着特性:无论输出高电平还是低电平,都会随着电流的增加电压往不理想方向变化?因此就存在这么一个问题——带多少负载还处在理想范围?
由于每个输入都取电流,现在要做的事情:虽然输入取了电流,但带完负载后输出仍然能够满足噪声容限极限电平值,即

因此我们可以根据下图所示输出高低电平特性曲线,得到

对应的电流是多少?
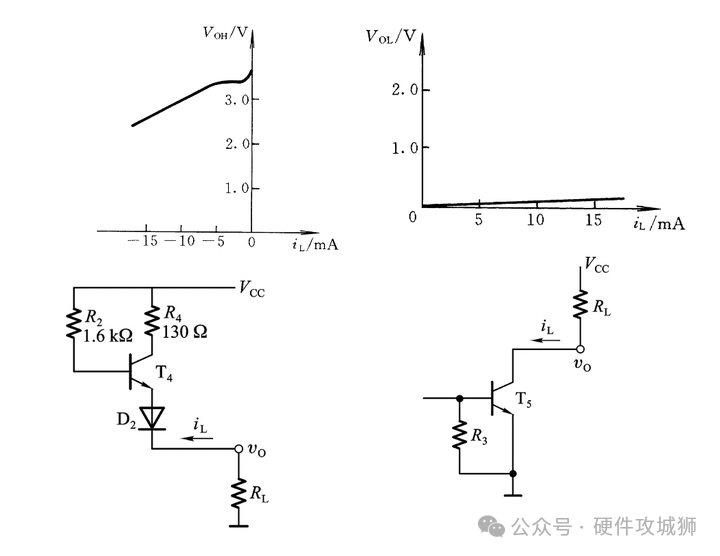
然后根据下图所示的输入电压电流曲线来找到每个门输入高低电平对应的电流分别是所少
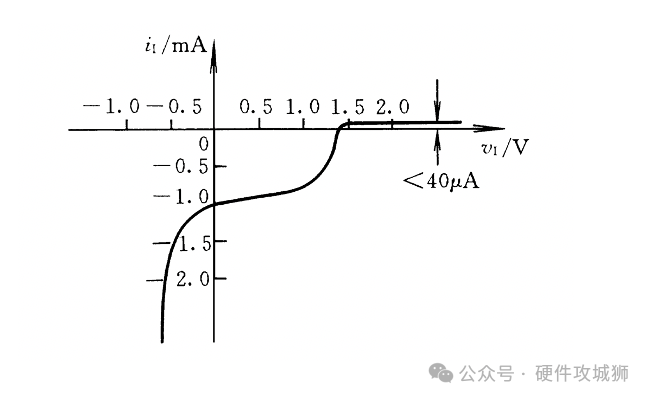
最后高低电平分别进行:门输出电流/门输入电流,从这两个值中选择最小的一个就是扇出系数。
理想的的CMOS电路的驱动能力无限,因为CMOS电路不取电流,电压传递有这个效应建立起来就可以。一般来说CMOS门电路带负载能力比TTL门电路更强一点,故扇出系数远比TTL电路高,因为正常电压传输不需要电流。
TTL电路,其扇出系数一般为(8~10),CMOS门电路的扇出系数一般为(20~25)。
由于CMOS集成电路的输入阻抗极高,因此电路的输出能力受输入电容的限制,但是,当CMOS集成电路用来驱动同类型,在低频(< 1MHz)的工作条件下,如不考虑速度,CMOS电路的扇出数可以达到50以上的输入端。
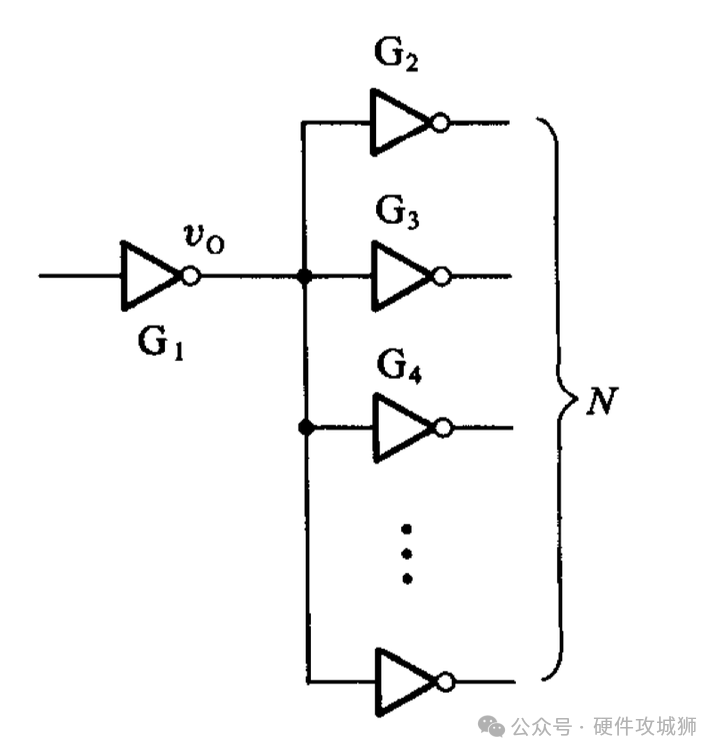
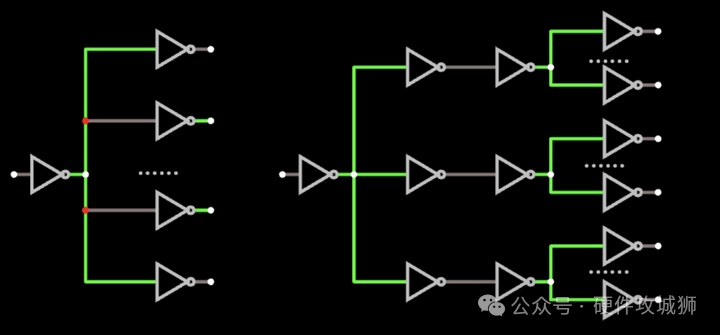
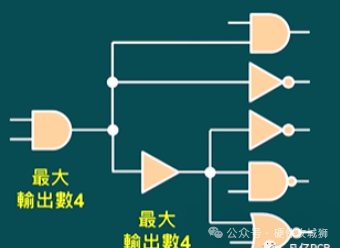
若门的驱动能力不够时怎么处理? 每个门的输出引入两个反相器,然后它的输出可以变成新的门扇出系数。从而原始门的扇出系数等于新的所有输出扇出系数之和,如下图所示:
为什么现在大部分数字芯片使用CMOS工艺而不是TTL工艺?
主要是因为TTL器件的逻辑单元三极管是电流驱动型器件,稳定时损耗高,发热量大,无法做集成度比较高的芯片。但是TTL电路的延迟比CMOS电路的小。
逻辑电平驱动类别
TTL电路是电流控制器件,而CMOS电路是电压控制器件
单端逻辑电平:电压驱动
单端逻辑电平:电流驱动
TTL、LVTTL
差分逻辑电平(高速):电流驱动
ECL、PECL/LVPECL、LVDS、CML、HCSL/LPHCSL、TMDS
差分逻辑电平(高速):电压驱动
VML
在传输线理论分析的时候,总是分析一个电压波形的传递,并未考虑电流能力(驱动电流的大小),而事实上,对于高速信号来说,为了要快速响应,或者长距离传输,都是采用电流驱动的。
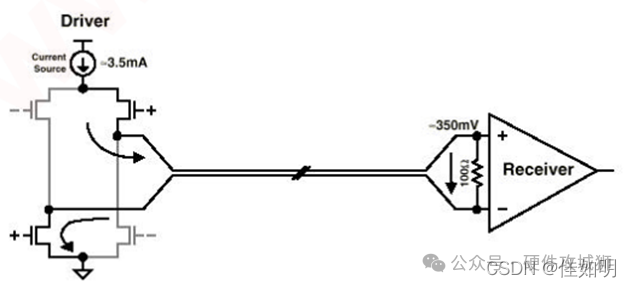
LVDS/LVPECL/CML等电平,在输入端都有匹配电阻(50/100欧姆),这些电阻对于输入门来说承担的是把电流转换成电压的任务。因为对于一个输入逻辑门来说,它对电流的需求并不大,它需要的是足够的电压幅度。既然芯片需要的是电压幅度,为何输出端不直接把电压传递过来呢。那是因为电压传递速度比较慢,并且容易受到干扰。而电流驱动反应速度快,抗干扰能力强。
电流驱动型链路,在接收端都有一个电流转成电压的电路(这个电路同时也承担着匹配的任务)。大家可以理解一下CMOS电路,如果驱动能力比较弱的话,信号的上升沿和下降沿就会很缓,能传的频率就会很低。
例如 LVDS差分电路是电流控制型器件,但采用CMOS工艺,在接收端转换成350mv电压。
拉电流和灌电流是衡量驱动能力的参数
由扇出的定义式我们可以看出扇出系数同灌电流和拉电流密切相关。
当逻辑门输出端是低电平时,灌入逻辑门的电流称为灌电流(sink current),一般是要吸收负载的电流。灌电流越大,输出端的低电平就越高。由三极管输出特性曲线也可以看出,灌电流越大,饱和压降越大,低电平越大。逻辑门的低电平是有一定限制的,它有一个最大值UOLmax。在逻辑门工作时,不允许超过这个数值。
当逻辑门输出端是高电平时,逻辑门输出端的电流是从逻辑门中流出,这个电流称为拉电流(sourcing current),一般是对负载提供电流。拉电流越大,输出端的高电平就越低。这是因为输出级三极管是有内阻的,内阻上的电压降会使输出电压下降。拉电流越大,高电平越低。逻辑门的高电平是有一定限制的,它有一个最小值UOHmin。
由于高电平输入电流很小,在微安级,一般可以不必考虑,低电平电流较大,在毫安级。所以,往往低电平的灌电流不超标就不会有问题,用扇出系数来说明逻辑门来同类门的能力。
所以,拉电流与灌电流反映了输出驱动能力。(芯片的拉、灌电流参数值越大,意味着该芯片可以接更多的负载,因为,例如灌电流是负载给的,负载越多,被灌入的电流越大)。
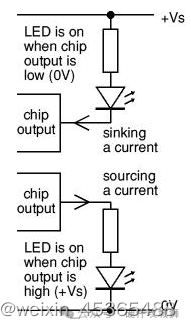
对一个端口而言,如果电流方向是内部电流通过芯片引脚从芯片内流出的则是“灌电流”,比如一个IO通过一个电阻和一个LED连接至VCC,当该IO输出为逻辑0时能不能点亮LED,去查该器件手册中sink current参数。
对一个端口而言,如果电流方向外部电流通过芯片引脚向芯片内流入的则是“拉电流”,比如一个IO通过一个电阻和一个LED连至GND,当该IO输出为逻辑1时能不能点亮LED,去查该器件手册中sourcing current参数。
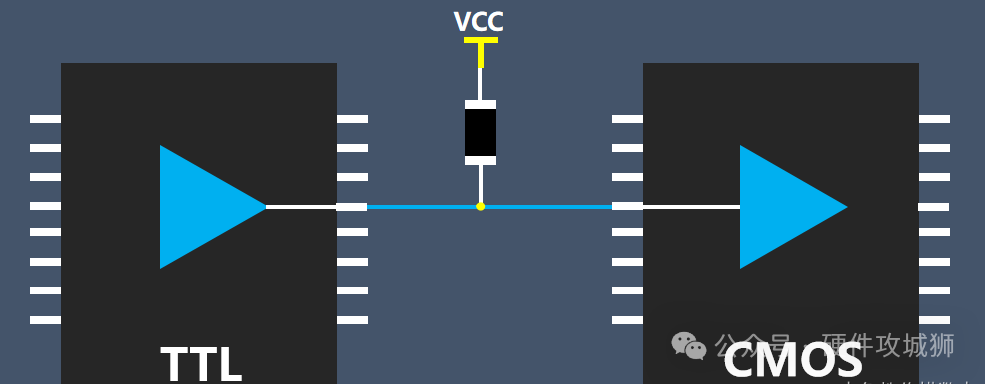
TTL和CMOS器件相互驱动分析
比较两者输入输出电平,很明显TTL不能直接驱动CMOS器件,而后者可直接驱动前者;所以TTL驱动CMOS需要在外围加上拉电阻,而且TTL的VCC接了电阻,高电平驱动能力很小。
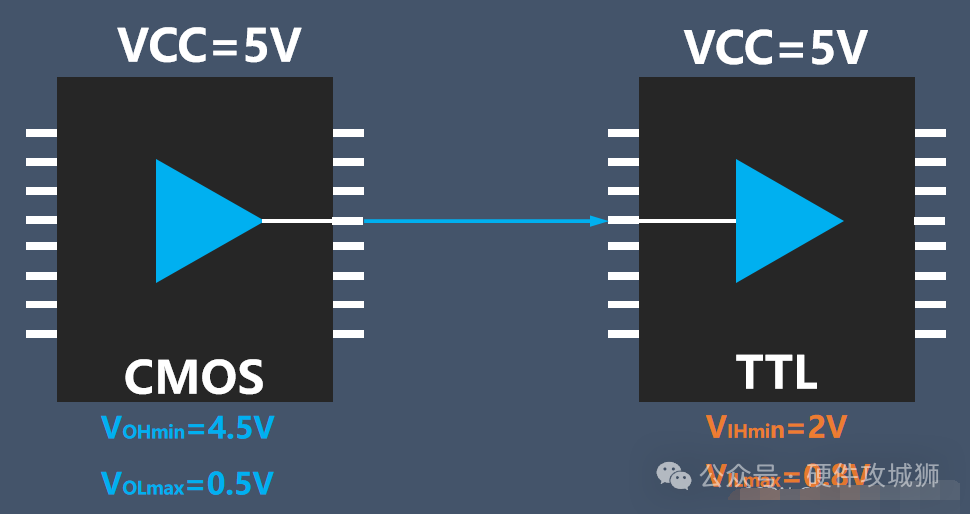
当CMOS器件IO做输出,TTL器件IO做输入时,TTL输入高电平最小为2V,输入低电平虽大为0.8V,显然CMOS器件的输出电平可以满足TTL器件的输入高低电平的范围。
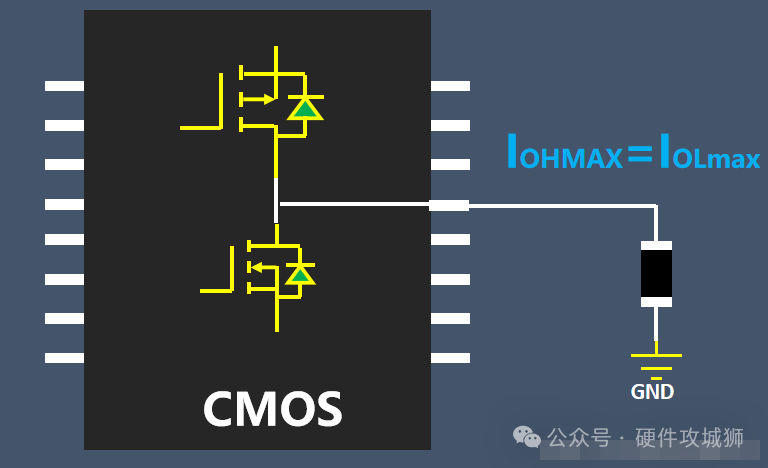
CMOS器件的高电平和低电平驱动能力相近,一般都可以到5mA左右,
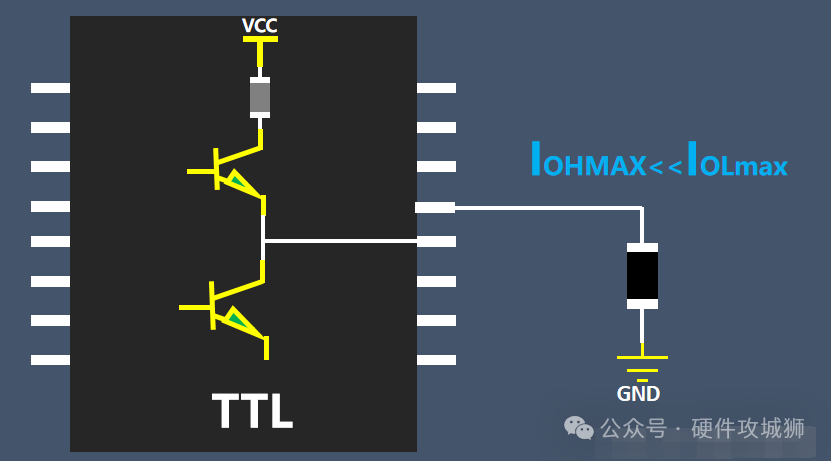
但是TTL器件IO的高电平驱动能力要远小于低电平驱动能力,一般高电平驱动能力只有0.几mA的样子,但是低电平驱动能力可以到5mA左右。这是因为TTL器件IO口上面的三极管都是加了电阻的,这个电阻值在几百欧的样子,这就限制了其高电平的驱动能力。
由于CMOS器件输入阻抗高,悬空的话会很容易受到干扰,所以一般CMOS器件不用的输入引脚在数据手册上都是要求上拉或者下拉。
数字电路中Buffer芯片设计
反相器是最基本门电路之一非门
反相器,顾名思义,在逻辑上起到的是取反作用,在数电中学习了许多反相器,其中最重要的两个是CMOS反相器和TTL反相器。
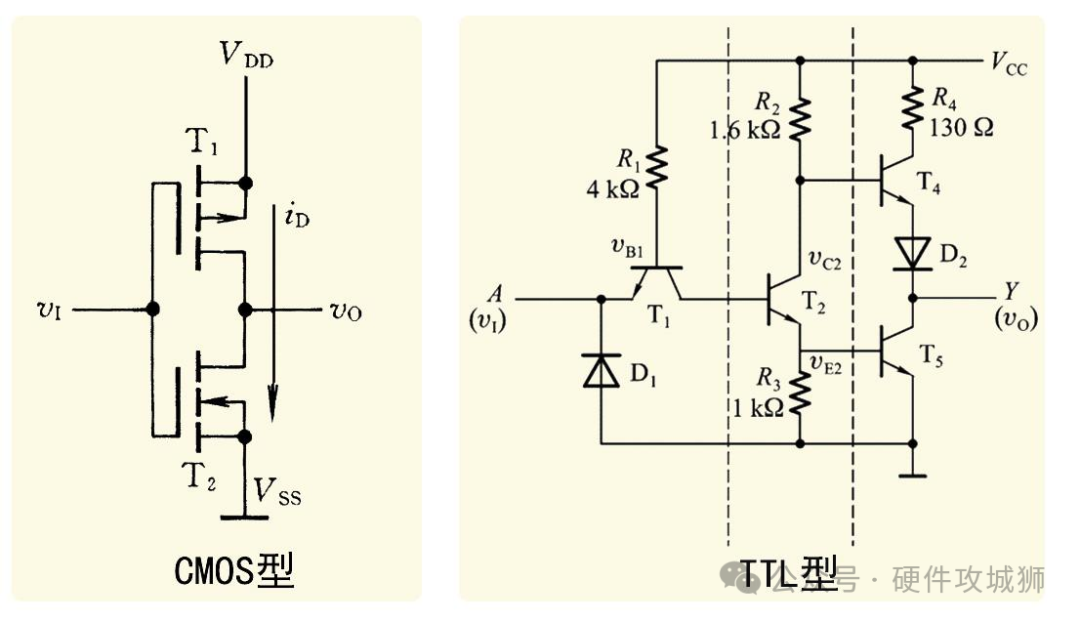
【注意】TTL电路输入用的是多发射极的三极管,多发射级三极管输入端是与的关系。
反相器驱动能力参数 ---- 动态特性
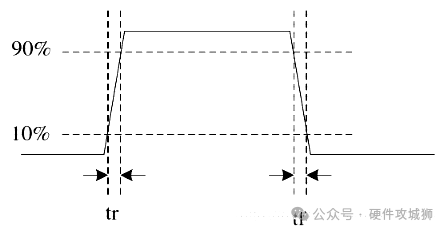
1、Transition Time(转换时间):
上升时间和下降时间统称为Transition Time,也有定义为20%到80%。
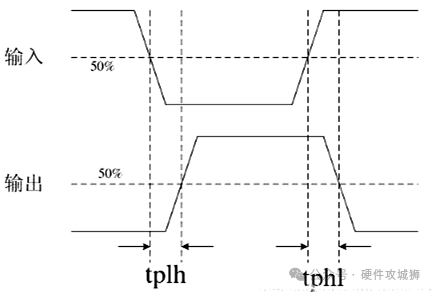
2、Propagation Delay(传播延时):
在输入信号变化到 50%Vdd到输出信号变化到50%Vdd之间的时间。
Buffer基本构成
在CMOS集成电路中,反相器由两个互补的晶体管NMOS+PMOS组成,同时利用两级反相器即可构成缓冲器,又称为(buffer)门即buffer。
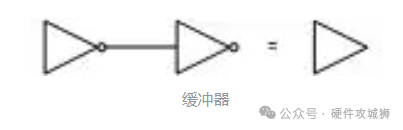
缓冲器可用如下符号表示。
除了输入端的小圆圈,这个符号与反向器是很相似的。很明显,缓冲器 “没有什么作用”,它的输入与输出是相同的。
缓冲器的输入与输出
缓冲器可以用于延迟信号,这是因为继电器需要一点时间才会被触发。
其中缓冲器与非门几乎是兄弟,因为其外形实在太相似了,下面来看一下反相器(非门)的符号:
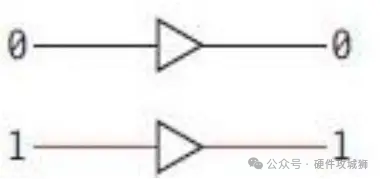
缓冲器其逻辑关系为:
当输入为0时,输出也为0
当输入为1时,输出以为1
那么这个门电路没有任何逻辑运算,他与非门也只差一个小圈圈,其作用是什么?
缓存的功能为:用来放大或增强电压或讯号电流,来达到功率增加其驱动能力。
什么意思?上图:
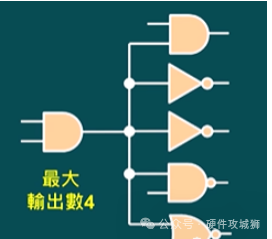
如图所示,这是一个四输出的逻辑门,而其负载有5个门电路,显然会发生驱动力不足,那么可以在输出端前串联一个缓冲器,如图所示:
这样可以将四输出逻辑门的驱动能力增强。这就是缓冲器的作用,当然这是最简单的缓存器,也可以用三态逻辑门,来制作缓冲器。
Buffer提高驱动能力/带负载
buffer一般是几级器件尺寸逐步增大的反相器或类似结构的电路。buffer实际就是两个串联的反相器,常用于时钟路径中,用于增加时钟驱动能力,使得时钟clock具有良好的上升沿和下降沿。时钟buffer本身是输入负载较小,输出驱动能力较强。因此前级电路驱动buffer容易,而buffer驱动后级电路也比较容易。
Buffer有同相、反相、三态输出、时钟缓冲器、总线输出缓冲器、驱动器等,不同Buffer的作用:
增强驱动能力,输出电流不够的时候通过buffer可以增加输出电流,加强驱动能力。
减少负载数量,负载数量很多时可以通过增加buffer来减少同时驱动的负载数量。
减小连线负载,当数据线很长的时候,负载电容很大,延时很长,增加buffer分割连线,减小驱动负载,当然这时候需要比较buffer本身延时和连线延时,只要连线延时明显大于buffer自身延时就可以采用这种方式。
复制时钟信号,单个晶振或多个晶振提供参考给多个芯片,会有信号完整性和成本问题,一个晶振加buffer可以做到最佳性价比。
转换时钟信号格式,晶振输出信号和芯片需要的参考时钟信号不匹配时可以通过buffer实现转换。
转换时钟信号电平,已有频率源和实际芯片要求的参考电平不一致时,可以使用buffer来转换。
两个重要作用:
1.提高驱动能力
buffer是一种宽高比很大的mos管,宽高比大意味着电流大,驱动能力高。
在扇出很大的wire中插入buffer可以提高带负载能力,常见于时钟树中。
2.确保信号时序正确
当一条wire很长时,延迟很大(delay正比于长度的平方,设长度为1,delay为1),这时在中间插入buffer,wire delay变为1/4+1/4=1/2,只要buffer delay小于1/2,则buffer的插入可以缩短wire delay。
当一条wire的延迟不大时,如果有hold violation(表现为数据到达过快,需要滞后到达),则插入buffer,利用buffer delay可以修正这个hold violation。
增强驱动能力/减少连线负载/降低delay都是如何体现的?
当数据连线很长时,连线负载电容很大,导致存在很大的延时。此时插入buffer将连线分割成几个连线,每个buffer驱动的负载较小,因此能够有效减少延时,虽然buffer本身也具有延时,但是插buffer减少的连线延时明显大于buffer自身延时就可以采用插buffer的方式。
通过插buffer的方式减少了电路的负载电容,负载电容减少后,同样电压的情况下,对电容充电速度快(上升沿陡峭),同样电容小时存储的电容小,放电所需的时间短(下降沿陡峭)。一句话来说就是: 插buffer的方式减少了电路的负载电容,从而增大了电路驱动能力。
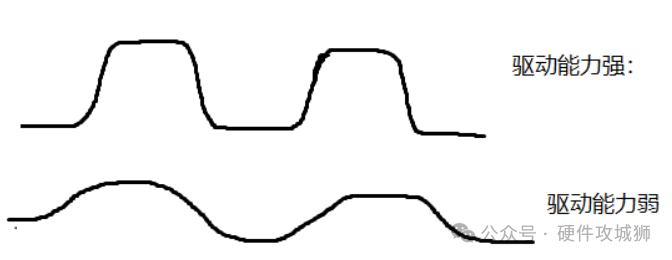
如下图所示:
驱动能力强:摆幅大,上升快
驱动能力弱:摆幅小,上升慢
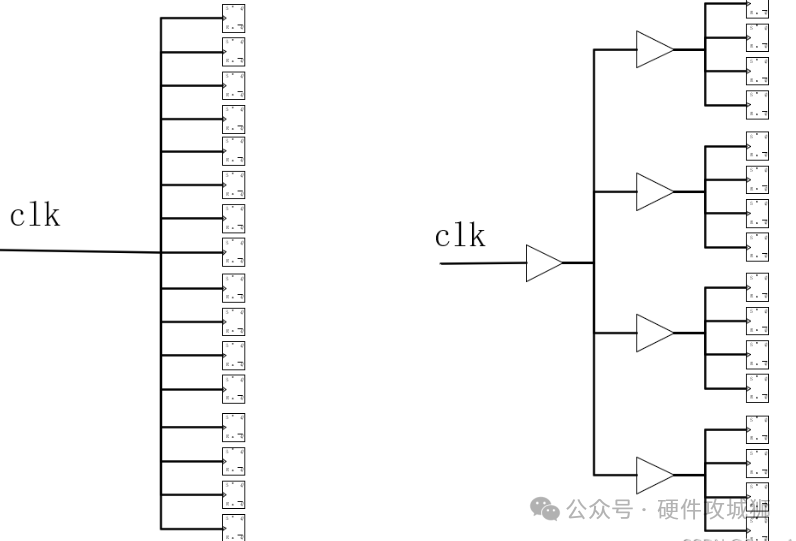
时钟驱动16个reg时,负载很大,时钟上升很慢,并且时钟摆幅小,此时插入4个buffer。加buffer之前你的时钟直接驱动寄存器或者很多个寄存器。加buffer以后你的时钟只驱动buffer,而你的buffer会去驱动寄存器。时钟buffer本身是输入负载较小,输出驱动能力较强的。而且通常会做成一个时钟buffer网络来驱动设计里面全部的寄存器,并保证整个时钟网络上的信号有很好的transition,以及平衡从时钟源到所有寄存器的insertion delay.寄存器的CK端接在时钟上面, 在时钟上加入buffer是在做时钟树的时候让时钟到每一个寄存器的CK端的SKEW尽可能的小,还有增加驱动的功能。
工作原理:通过插buffer的方式减少了电路的负载电容,负载电容减少后,同样电压的情况下,对电容充电速度快(上升沿陡峭),同样电容小时存储的电容小,放电所需的时间短(下降沿陡峭)。一句话来说就是: 插buffer的方式减少了电路的负载电容,从而增大了电路驱动能力。
不插buffer会发生什么情况?
不插buffer会导致驱动能力不够,通常是两种情况
第一种是输出电流不够,导致信号状态异常,这常常发生在后级电路对输入电流有要求的时候,另一种则是输出电流不够,导致信号上升下降沿太差,这常常发生在后级电路的输入电容较大的情况。
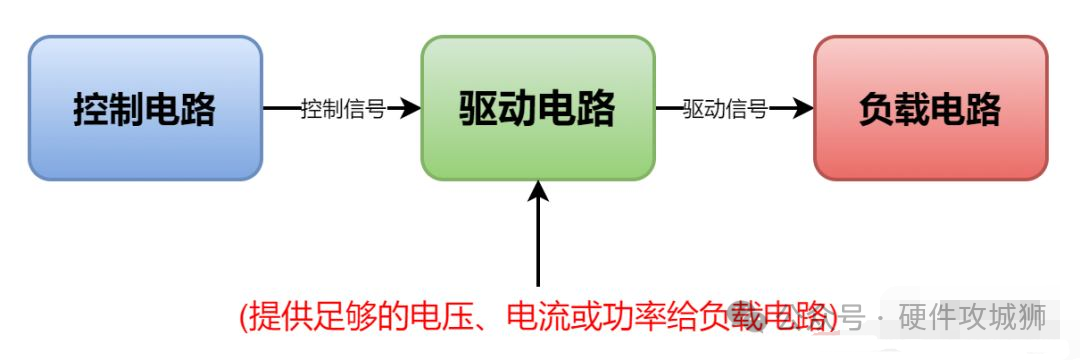
驱动电路定义
驱动电路(Drive Circuit):如下图所示,驱动电路位于控制电路与负载电路之间,将控制电路的控制信号转化为负载电路所需的驱动信号,提供足够电流或功率驱动负载电路;
驱动电路:晶体管与MOS管构成的放大电路,开关电路;驱动IC;
一、驱动电路作用
在电源或者硬件设计中,无论是三极管还是MOS管,一般都需要驱动电路进行驱动。驱动电路的主要作用有:
1.提高系统可靠性
2.提高变换效率(开关器件开关、导通损耗)
3.减小开关器件应力(开/关过程中)
4.降低EMI/EMC
提供足够的驱动能力
打个比方,一个单片机的高电平信号为5V,而5V是没办法直接驱动12V或者24V的继电器正常工作的。通常这时候就需要引入驱动电路,使5V也能够控制末端继电器的开断。
保证开关管良好的开关状态
在一个电路中,开关管不能太快或者太慢,太快会对电磁造成很大的干扰,太慢开关损耗太大。
保证器件的可靠性,避免过压和过流
由于开关寄生参数的存在,在导通或者关断是,往往产生很大的电压电流尖峰,这会对电路的性能和器件的可靠性有影响。
二、常见驱动方式
1、直接驱动
直接驱动电路是由单个电子元器件(如二极管、三极管、mos管、电阻、电容等)连接起来组成的驱动电路,电路中不具备电气隔离,多用于功能简单的小功率驱动场合。在复杂的数字电源系统中,直接驱动电路由于集成度低、故障率高等原因,已被逐渐淘汰。
功率开关管驱动
以控制信号类别分类,驱动方式可以分为电流驱动和电压驱动。
电流驱动
电流驱动实际上是通过控制三极管导通来控制信号的通断。
控制方式: 电流型驱动是通过控制电流的大小来实现设备或器件的操作。驱动器提供恒定的电流,设备的性能取决于电流值。
稳定性: 电流型驱动在某些情况下可以提供更稳定的操作,因为电流不受电阻变化的影响。这对于一些需要精确控制的应用很有用。
灵敏度: 电流型驱动通常比电压型驱动更适用于一些对电流变化较为敏感的设备,如光电二极管(Photodiode)和激光二极管(Laser Diode)。
适用范围: 电流型驱动常用于需要对电流进行精确控制的设备,如光电子器件、传感器等。BJT常用于低功率数字电源
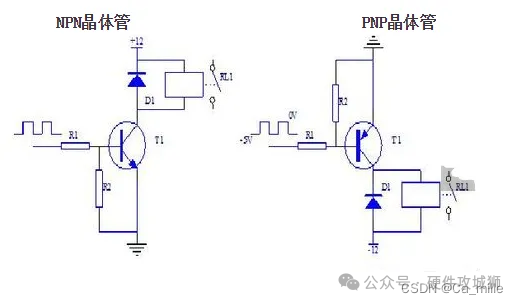
在NPN晶体管电路中,R1起限流作用、R2起下拉作用。因为在电路关断之后,三极管be端电压缓慢下降,可能会处于较长时间的放大状态,会损坏三极管。因此需要下拉电阻R2,使得关断时积极电压迅速拉低,提高三极管的关断速度。
1、当输出为0V时,三极管截止,继电器线圈无电流流过,为OFF状态;
2、当输出为+Vcc时,三极管饱和,继电器线圈流过一定的电流,继电器吸合,为ON状态;
3、当输入电压又+Vcc变为0时,,三极管由饱和变为截止。
由于继电器线圈相当于一个电感,由于电感的特性是通直流、阻交流,在断开瞬间,线圈两端会产生较大的反向电动势,电压值可达一百多伏,这个电压加上电源电压作用在三极管的集电极上足以损坏三极管。所以需要并联一个续流二极管,为自感电势提供泄放通路。(续流需要选择肖特基二极管,有利于快速泄放电势)
电压驱动
电压驱动实际上是通过控制MOS管导通来控制信号的通断。
控制方式: 电压型驱动是通过控制电压的大小来实现设备或器件的操作。驱动器提供恒定的电压,设备的性能取决于电压值。
灵活性: 电压型驱动通常更灵活,适用于各种设备,因为不同设备可能对相同电压产生不同的响应。
易于集成: 电压型驱动适用于集成电路(IC)等多种设备中,因为IC中通常使用电压信号进行通信和控制。
适用范围: 电压型驱动常用于需要对电压进行精确控制的设备,如逻辑门、存储器等。常用于中小功率数字电源。在高频场合多采用变压器或专用芯片进行驱动。
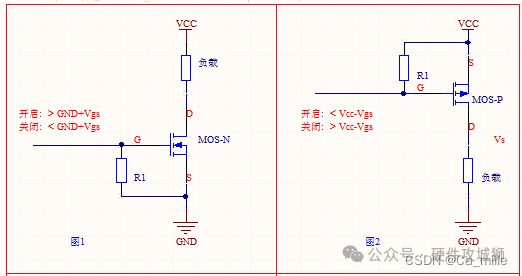
图1是N管常用的电路接法。N管S端接地,D端接负载。当G端信号大于Vgnd+Vgs的时候,MOS管开启,当信号电压小于Vgnd+Vgs时关闭。R1电阻为下拉电阻。
图2是P管常用的电路接法。P管S端接Vcc,D端接负载。则当G端信号电压小于Vcc-Vgs的时候,MOS开启,当信号电压大于Vcc-Vgs时关闭。
电流和电压特点
电流驱动型:
优点:精度高、响应速度快、效率高、抗干扰能力强、驱动功率大、耐压、容量大
缺点:开关速度慢、成本高、稳定性差
电压驱动型:
优点:开关速度快
缺点:不适合于高电压的场合、抗干扰能力弱
从器件来说:
电压驱动的如:
场效应管,因为它的内阻很大,加电压控制时电流很小,近似为零,所以可以理解成:电压驱动;
电流驱动的如:
普通的NPN、PNP型三极管,因为它的内阻较小,加电压控制时电流相对较大一般小功率的都有100uA以上,大功率的可达20mA以上),所以可以理解成:电流驱动;
从控制原理来说:
电压驱动的如:场效应管,它是通过加到G、S端的电压(微观的就是电场)来控制D、S内部通道的宽窄(即通道可变)来控制D、S两端电流;
电流驱动的如:普通的NPN、PNP型三极管,是通过加到B、E端的电流(微观的就是电子的流动)来控制C、E内部的电流流动(即通道不变)。
电压驱动型器件内阻大,加电压后电流小,只需要较小的驱动功率,场效应晶体管(FET)是电压控制器件、MOS电路是电压控制器件,又比如气体型霓虹灯,电压低了连亮都不亮。亮了以后电流很小,那么就把它确定为电压型器件。
电流驱动型器件内阻较小,加电压后电流较大,需要较大的驱动功率,双极型晶体管(BJT)是电流控制器件、TTL电路是电流控制器件,又比方发光二极管,其输入电压基本是一个确定值,提高电流可以改变亮度,减小电流降低亮度,它确定为电流型器件。
电压驱动(Voltage Drive)是通过控制电路的输出电压来实现对电路的控制。在电路中,电压是电流的驱动力,通过控制电压来控制电路中的电流和功率。电压驱动方式通常使用开环控制,即电路输出与输入电压成正比关系。当输入电压变化时,输出电压和输出电流也会随之变化,电路的稳定性较差。
电流驱动(Current Drive)是通过控制电路的输出电流来实现对电路的控制。在电路中,电流是电压和电阻的函数,通过控制电流来控制电路的电压和功率。电流驱动方式通常使用闭环控制,即电路输出电流与输入电流成正比关系。当输入电流变化时,输出电流会自动适应,电路的稳定性较好。
电压驱动方式比电流驱动方式适合用于复杂的电路控制。例如,在数码电路中,由于需要对各个部件进行动态调节,因此要求输出电压稳定,而电流驱动方式则无法满足这一需求。而在高功率功放、磁控管等高阻负载的电路中,电流驱动方式优势更加明显。这些负载的阻值变化范围大,且负载阻值与电流成正比,要求输出电流能够自适应变化。
2、推挽驱动
当电源IC驱动能力不足时,可用推挽驱动。
这种驱动电路好处是提升电流提供能力,迅速完成对于栅极输入电容电荷的充电过程。这种拓扑增加了导通所需要的时间,但是减少了关断时间,开关管能快速开通且避免上升沿的高频振荡。
如下图所示,推挽驱动电路包含一个PNP三极管及一个NPN三极管,采用互补输出。输入高电平时,上管NPN开启,下管PNP关闭,驱动MOS管开启;输入低电平时,上管NPN关闭,下管PNP开启,驱动MOS管关闭。
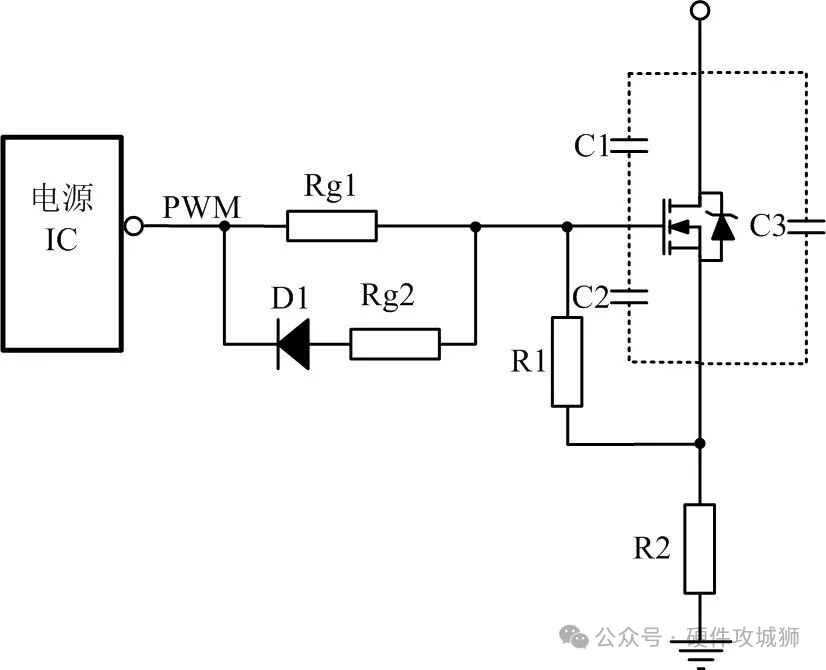
加速关断驱动
MOS管一般都是慢开快关。在关断瞬间驱动电路能提供一个尽可能低阻抗的通路供MOSFET栅源极间电容电压快速泄放,保证开关管能快速关断。
为使栅源极间电容电压的快速泄放,常在驱动电阻上并联一个电阻和一个二极管,如上图所示,其中D1常用的是快恢复二极管。这使关断时间减小,同时减小关断时的损耗。Rg2是防止关断的时电流过大,把电源IC给烧掉。
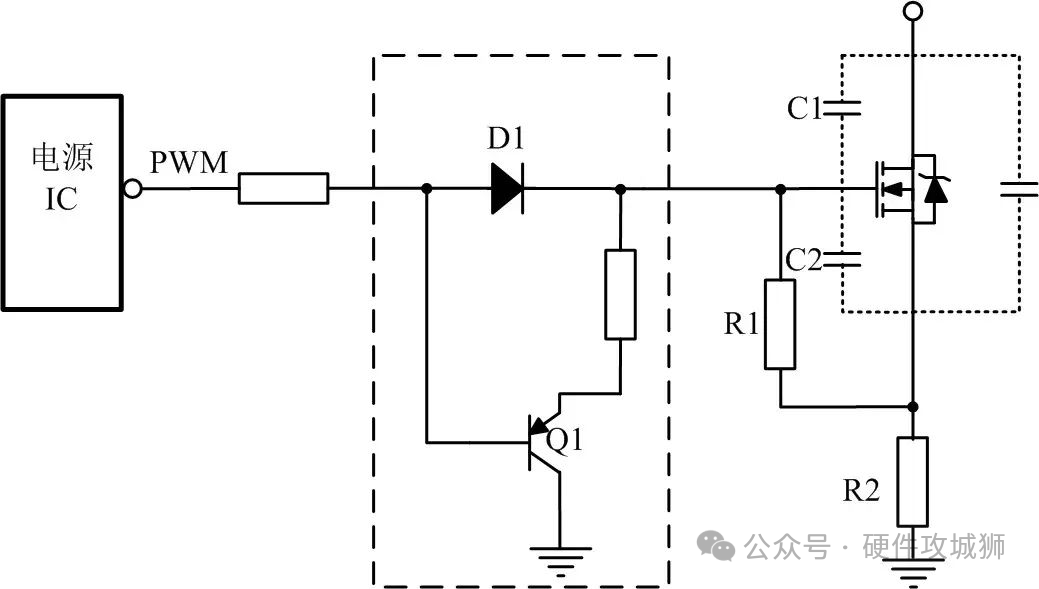
如下图,用三极管来泄放栅源极间电容电压是比较常见的。如果Q1的发射极没有电阻,当PNP三极管导通时,栅源极间电容短接,达到最短时间内把电荷放完,最大限度减小关断时的交叉损耗。
还有一个好处,就是栅源极间电容上的电荷泄放时电流不经过电源IC,提高了可靠性。
3、隔离驱动
电路包含隔离器件,常用的有光耦驱动、变压器驱动以及隔离电容驱动等。其中光耦驱动电路具有简单、可靠、开关性能好等特点。而变压器驱动电路不仅可以起到驱动作用,还可用于电压隔离和阻抗匹配。
驱动电路为什么要采取隔离措施
安规问题,驱动电路副边与主电路有耦合关系,而驱动原边是与控制电路连在一起, 主电路是一次电路,控制电路是ELV电路,一次电路和ELV电路之间要做加强绝缘,实现绝缘要求一般就采取变压器光耦等隔离措施。
注:
ELV(特低电压)电路:在正常工作条件下,在电路的任意两个导体之间或任一导体与地之间电压的交流峰值不超过42.4V或直流值不超过60V的二次电路。
一次电路:直接与交流电网电源连接的电路。通常是由高压线路、变电站以及与之相连的发电机和负载组成。特点是电压较高,通常在110 kV至1000 kV范围内,能够实现大功率的传输和供应。
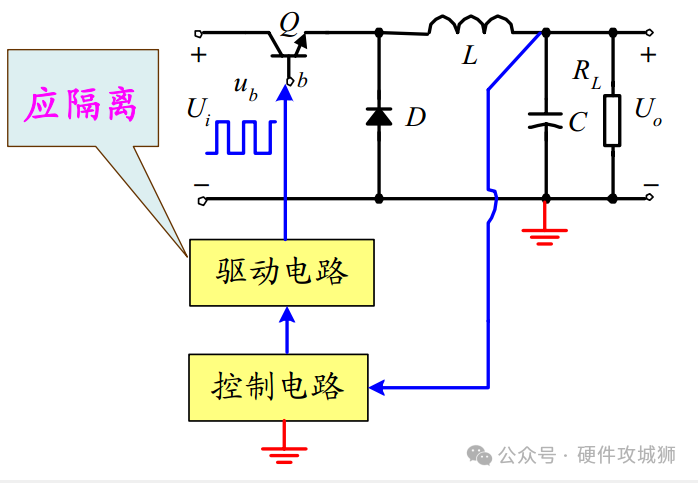
驱动电路采取隔离措施的条件
控制参考地与驱动信号参考地(e极)不同—驱动电路应隔离。
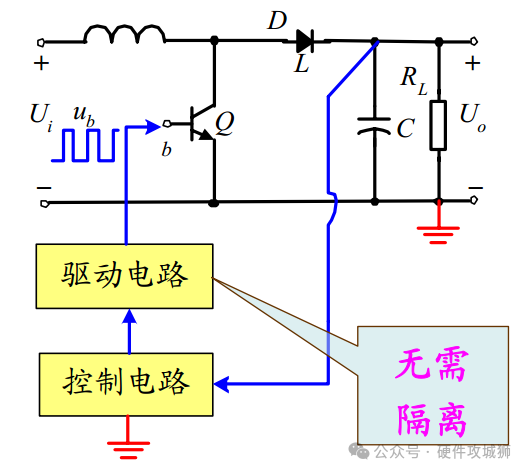
控制参考地与驱动信号参考地(e极) 同—驱动电路无需隔离;
驱动电路隔离技术
驱动电路隔离技术一般使用光电耦合器或隔离变压器(光耦合;磁耦合)。由于 MOSFET 的工作频率及输入阻抗高,容易被干扰,故驱动电路应具有良好的电气隔离性能,以实现主电路与控制电路之间的隔离,使之具有较强的抗干扰能力,避免功率级电路对控制信号的干扰。
光耦隔离驱动可分为电磁隔离与光电隔离。采用脉冲变压器实现电路的电磁隔离,是一种电路简单可靠,又具有电气隔离作用的电路,但其对脉冲的宽度有较大限制,若脉冲过宽,磁饱和效应可能使一次绕组的电流突然增大,甚至使其烧毁,而若脉冲过窄,为驱动栅极关断所存储的能量可能不够。光电隔 离,是利用光耦合器将控制信号回路和驱动回路隔离开。该驱动电路输出阻抗较小,解决了栅极驱动源低阻抗的问题,但由于光耦合器响应速度较慢,因而其开关延迟时间较长,限制了适应频率。
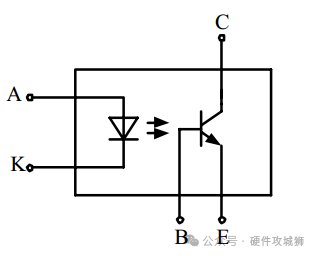
典型光耦内部电路图
光耦指的是可隔离交流或直流信号。
1.由IF控制Ic;电流传输比CTR-Current Transfer Ratio
2.输入输出特性与普通三极管相似,电流传输比Ic/IF比三极管“β ”小;
3.可在线性区, 也可在开关状态。驱动电路中, 一般工作在开关状态。
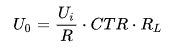
光耦基本电路
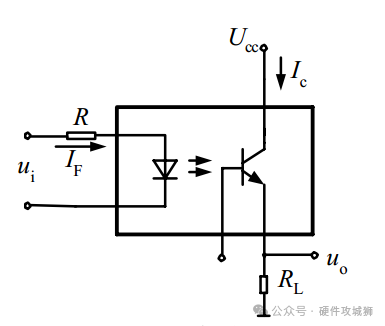
光耦的特点:
1. 参数设计简单
2. 输出端需要隔离驱动电源
3. 驱动功率有限
磁耦合-变压器隔离
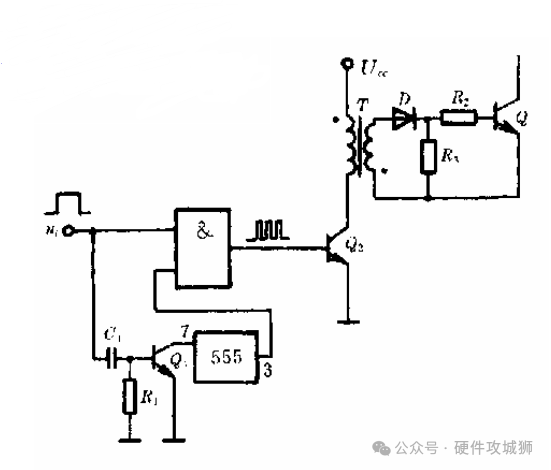
受高频调制的单向脉冲变压器隔离电路
磁耦合:用于传送较低频信号时—调制/解调
磁耦合的特点:
1.既可传递信号又可传递功率
2.频率越高,体积越小-适合高频应用
为了满足高端MOS管的驱动,经常会采用变压器驱动。其中R1目的是抑制PCB板上寄生的电感与C1形成LC振荡,C1的目的是隔开直流,通过交流,同时也能防止磁芯饱和。
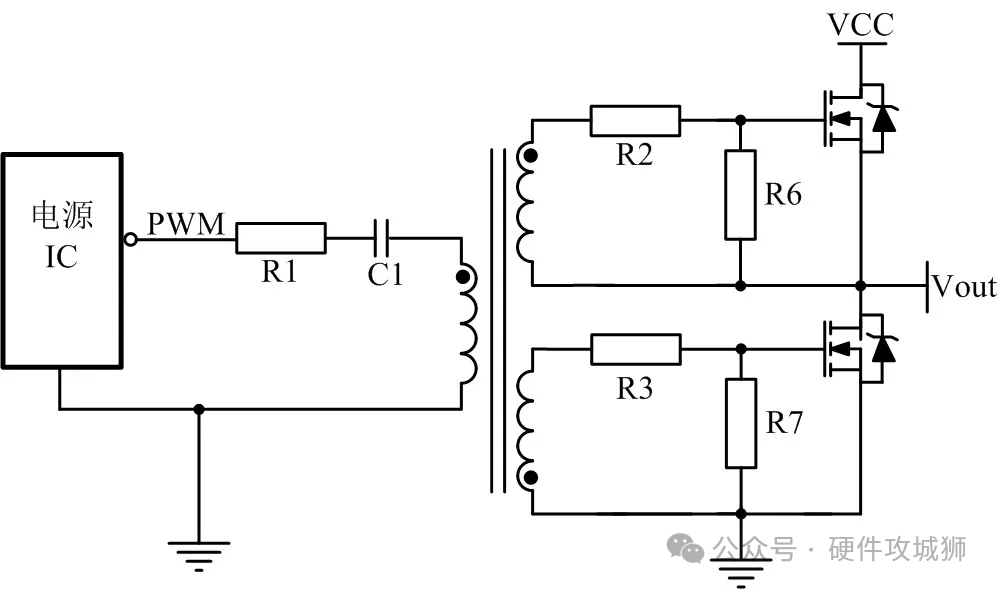
在第一个周期内OUTA 开启,给变压器一次绕组施加正电压,上管感应导通。在接下来的一个周期内,OUTB 开启(开启时间与OUTA相同),在磁化电感上提供极性相反的电压,下管导通。电路会产生两个双极性对称的栅极驱动电压输出,符合半桥电路的控制要求。
专用驱动集成芯片
目前专用驱动芯片在数字电源中应用广泛,许多驱动芯片自带保护和隔离功能。根据其控制的功率器件数量,驱动芯片可以分为单驱芯片与双驱芯片。其中双驱芯片通常用于半桥、全桥等电源拓扑,因为需要一对互补的控制信号。而单驱芯片则更适用于buck、boost、反激等电源拓扑。
三、驱动能力
所谓驱动能力,是指前级电路的输出信号可以使得后级电路有效响应,这个有效的包含两层意思:
第一是前级输出信号能被后级电路识别,
第二是在规定的时间内被后级电路识别。
驱动能力指输出端口的电流流入/流出大小,但大部分情况指输出端口的扇出能力。
扇出:一个输出端口连接多个输入端口。
从直流特性来讲
数字器件的输出端口有最大电流限制,超过电流限制,则有可能使输出电平幅度变低/烧毁器件。比方说,某单片机GPIO口高电平时的最大输出电流是20mA,那这个20mA规格就表征了该I/O口的电平驱动能力。而如果负载过大(比如小电阻),则负载电流有可能超过其最大输出电流,这时我们说驱动能力不足。驱动能力不足的直接后果是输出电压下降,对逻辑电路来说,无法保持其高电平甚至会出现逻辑混乱,这种现象一般是不允许出现的。因此,从直流特性的角度,驱动能力就是指输出端口的电流最大流入/流出能力。
从交流特性来讲
由于输入端口存在输入电容,因此输出端口电平反转过程,可以认为是输入端口电容充放电过程。输出端口扇出越大,则充放电速度/电平反转越慢,一定开关频率的情况下存在一个最大的扇出值,因此当实际扇出值大于最大扇出值时,电平反转速度过慢而无法满足要求。因此,从交流特性角度来讲,驱动能力也可以指器件输出端口的扇出能力,不过扇出能力还是和上端口的电流的流入流出能力有关。
电路的的驱动能力是上一级的1/R,即电阻的倒数,驱动能力大,说明看过去的电阻小。电路的负载能力是下一级的load(即电容)总和,负载能力大,说明能驱动下级的器件就很多”。
究竟“驱动能力”和“负载能力”的区别是什么?
个人感觉是两者是一样的,都是代表上级电路可以驱动下级电路的能力的大小。
上下拉电阻会增强驱动能力吗?
答:不存在上下拉电阻增强驱动能力这回事,因为除了OC输出这类特殊结构外,上下拉电阻就是负载,只会减弱驱动力。
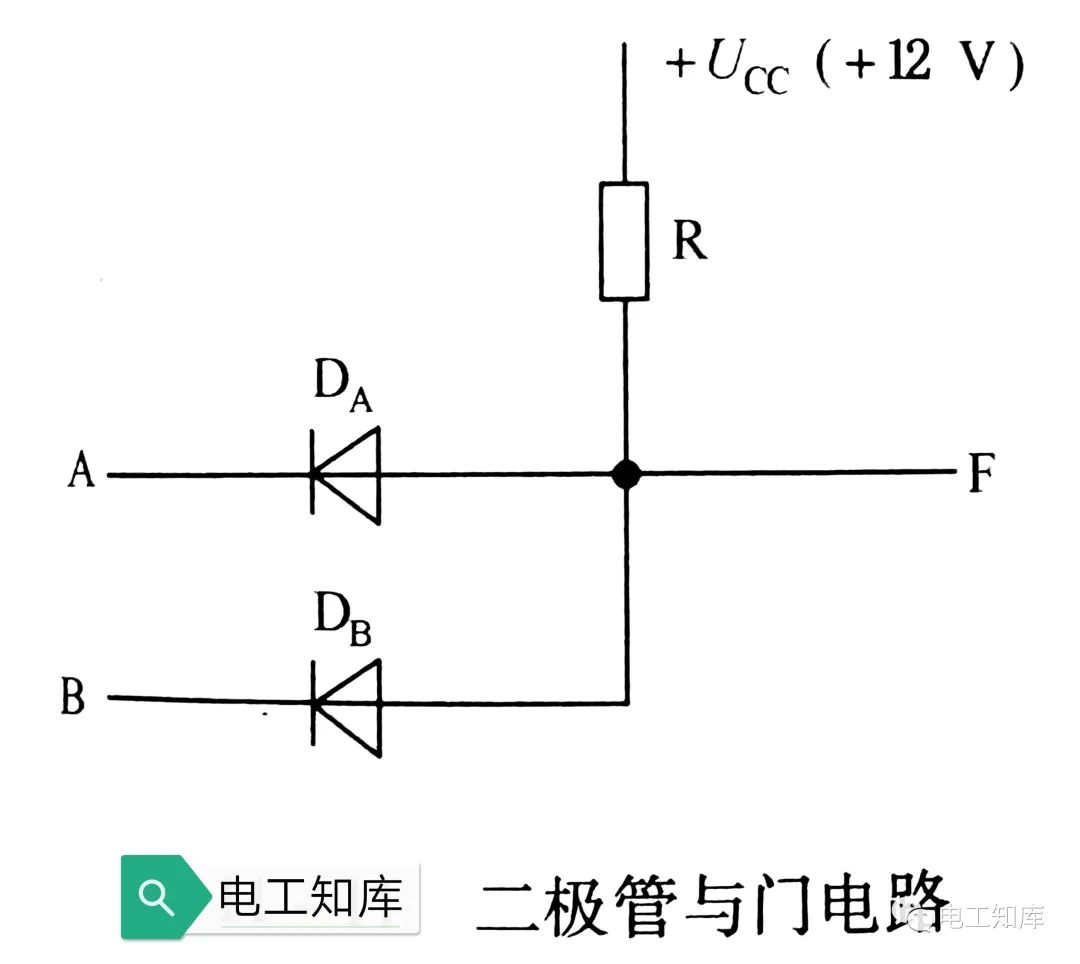
二极管逻辑
今天已经很难看到二极管逻辑电路了,其实用性也不算高,不过因为电路简单,非常适合用来理解基本概念。
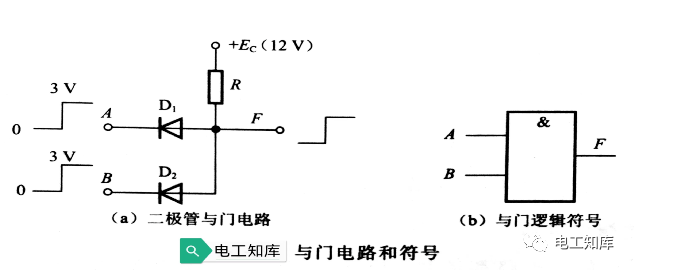
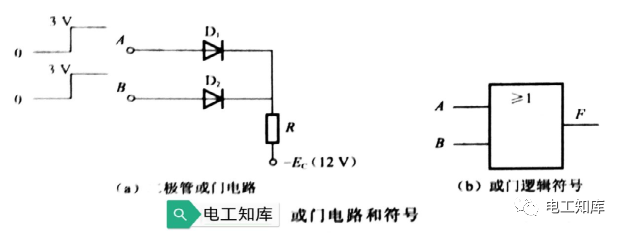
一个最简单的二极管与门如下图。与门实现逻辑与操作Y=A&B,即A或者B任意为L的时候,输出Y为L,只有当A和B都为H时,Y才为H。
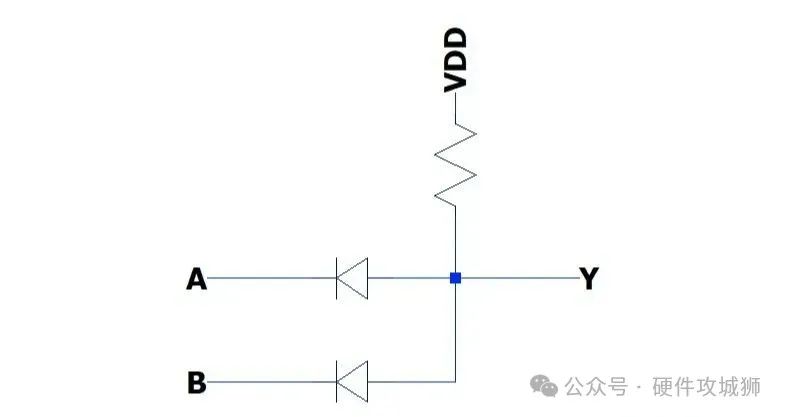
上图,基本二极管与门
假设二极管无导通压降,在这个电路中,二极管充当了单向开关的角色,当A和B等于VDD时,两根二极管反向截至,Y被电阻上拉到VDD,这是Y就是H;当A或者B任意一端为GND时,二极管导通,因为二极管导通时电阻很小,远小于上拉电阻,所以Y被拉到了GND,即逻辑L。
至于二极管或门,只要把二极管转一下,再把电阻从拉到VDD改成拉到GND就可以了,非常简单。
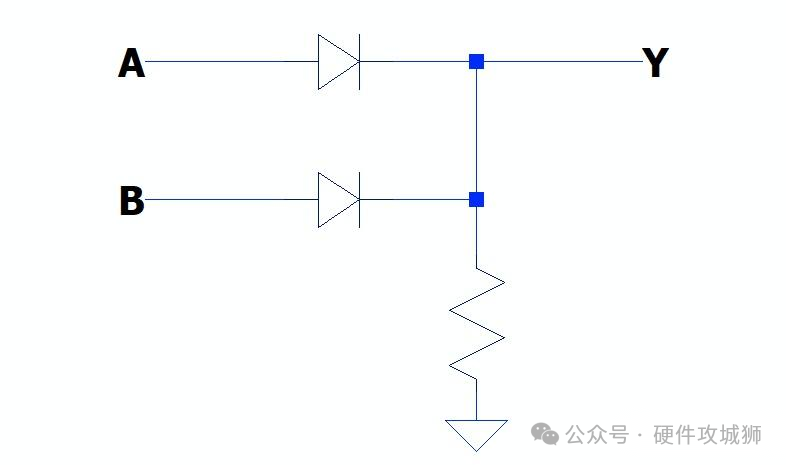
上图,基本二极管或门
基本原理
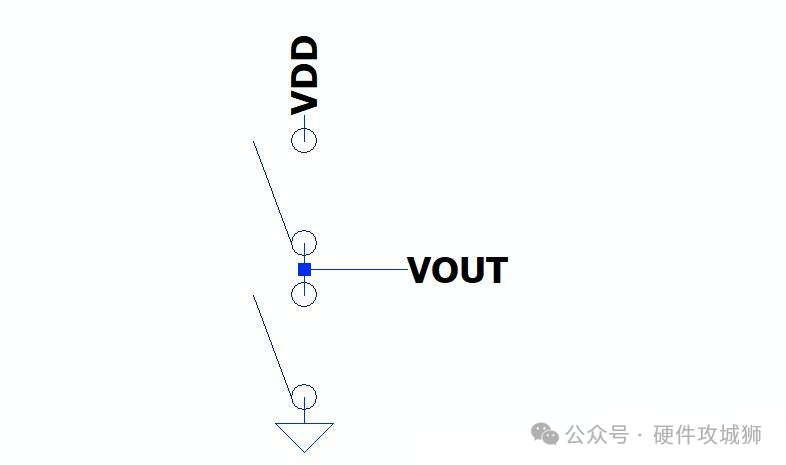
你看,在这么原始的逻辑电路中就已经出现了上下拉电阻,这里面的原理也非常简单粗暴:利用开关的闭合(电阻为0)和开启(电阻无穷大)的特性,配合电阻,就可以轻松实现两种电压的输出。这种电路还有一个变形,就是用恒流源取代电阻,一方面集成电路工艺,恒流源比电阻更容易获得,另一方面恒流源的驱动能力也更好。根据开关和电阻(或恒流源)的相对位置,有以下基本电路:即开关接到GND(L)或开关接到VDD(H)。
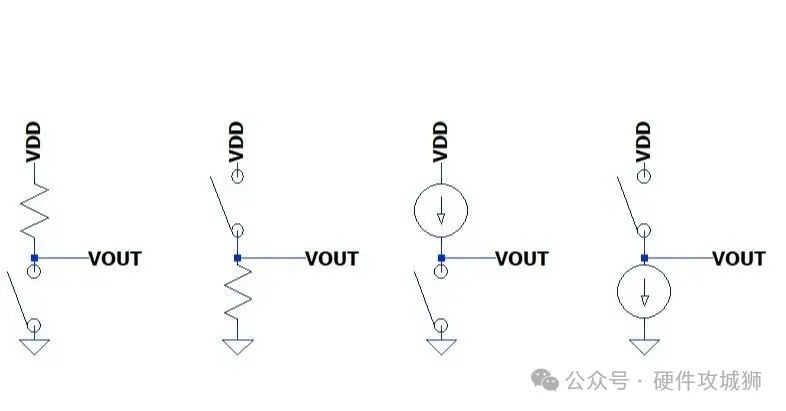
上图,几种开关电路接法
这几种电路都是由开关的闭合或开启决定了VOUT是VDD还是GND。开关的相对位置不同,还决定了电路在某一状态下的驱动能力:开关的导通电阻为0,可视为驱动力无穷大,可是电阻(或恒流源)的驱动能力呢,只有VDD/R(或者恒流I),这就导致了电路在输出H或L的时候驱动能力不对称(换一个说法,就是电路在输出H或者L的时候,输出阻抗不一样)。
除了驱动能力的问题,这种单开关加电阻的模式还会带来静态功耗的问题,因为只要开关闭合,不管外部有没有负载,都会消耗电流。
既然开关的驱动力比电阻强,那么能不能把电阻也换成开关?恭喜你,发现了现代CMOS逻辑电路的基本单元:俩互补的开关。这样不管输出H还是输出L,驱动能力都是无穷大!好的,这时候上下拉电阻就不见了。
这样两个开关的电路还多出来了一种状态:当两个开关都开启时,VOUT即不是VDD也不是GND,而是一个悬空的状态(即高阻态,Hi-Z),这时候外部给什么信号它就是什么状态。这样又出现了一个新的逻辑门大类:三态逻辑门。
上图,互补开关电路
很多经验不是空穴来风,只是在流传的过程中丢失了重要的前提条件。有一些逻辑器件,他们输出高和输出低时的驱动能力差别很大。
TTL(70xx、74Fxx、74Sxx、74LSxx等)家族的器件就属于这种类型,如下图是7404(TTL反相器)的原理图,由于非对称的输出级设计,输出为高时驱动能力只有0.4mA,而输出低时居然能输出16mA的电流(手册中的输出电流不是晶体管或者电路本身的极限,而是超过这个电流以后,输出的电压可能无法满足逻辑族的要求)。
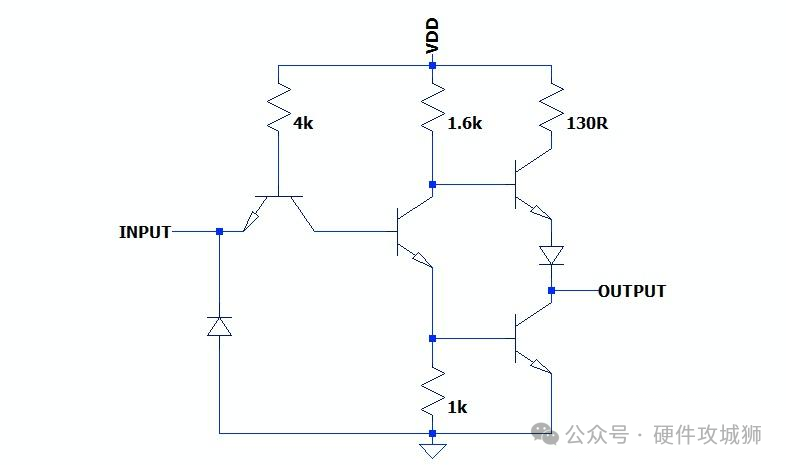
上图,7404的简化电路
这个时候在输出端口外加一个上拉电阻,就可等效以增强端口在输出H时的驱动能力,但代价是端口输出L时,驱动能力相应地减弱,不过这时候芯片输出能力足够强,用这点代价来换取另一个状态下驱动能力的增强,还是划算。
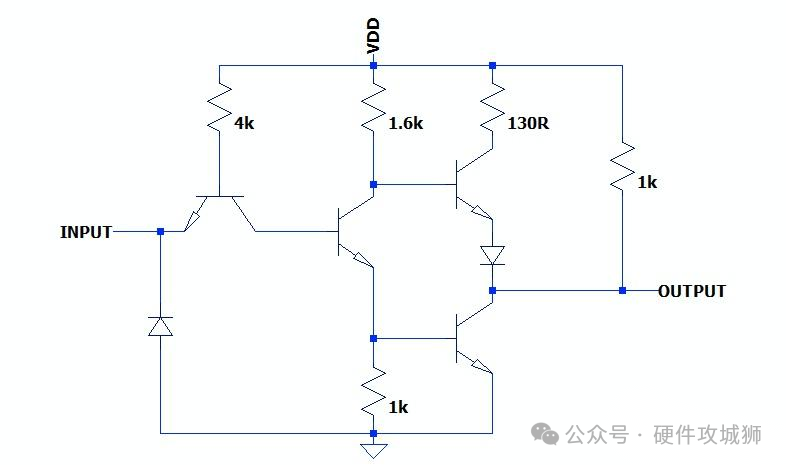
上图,带上拉电阻的7404
下表是仿真有无上拉电阻时,负载电流与输出电压的关系,可以看到上拉电阻确实增强了在一定负载下的输出电压,不过当负载电流较大时效果并不明显,而且边际效应也很显著,当上拉电阻减小到一定程度以后,增强效果也不太显著,而且会大大增加静态功耗。
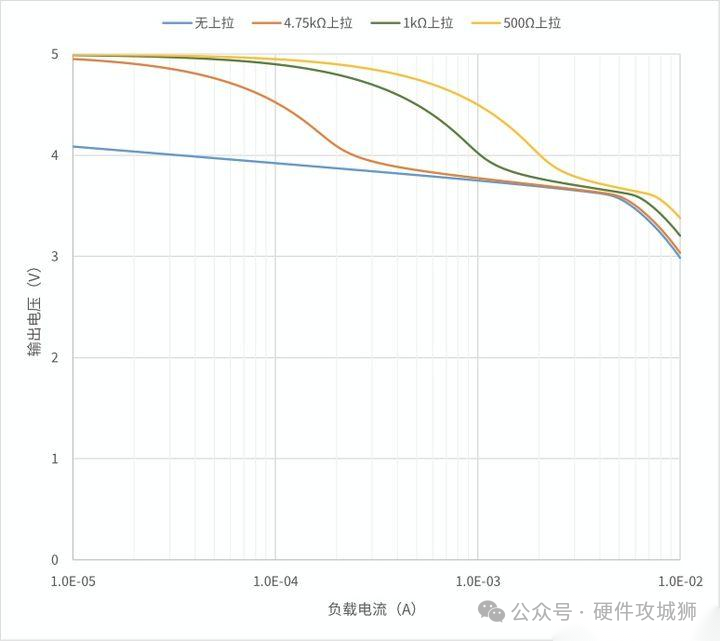
上表,带不同上拉电阻的7404输出电压与负载电流的关系
既然非对称的输出级有这样的问题,那为啥不能把这个驱动器设计成上下对称的呢?
一方面,如果要设计成上下对称的结构,上管需要用P管,而当时的工艺限制,P管各方面性能都不如N管,速度、功耗和成本都不是很划算,所以能看到很多上年代的芯片,内部几乎没有P管(包括MOS工艺的器件也是)。
另一方面,TTL输入结构的特点,输入为H时所需电流很小,而输入为L所需的输入电流很大,这样对输出L时的驱动能力要求就很高,反而对输出H时没有驱动能力要求(TTL输入悬空时等效为H)。
但TTL的这种特点,又会带来一个比较麻烦的问题:下拉电阻值需要很大才能满足要求,而下拉电阻太大则会导致输出高时负载太重以至于无法达到规定电压,所以TTL要尽量避免使用下拉。
下图是仿真结果,因为这是一个反相器,所以下拉时输出高是所期望的,而下拉电阻超过1.8kΩ时已经无法满足TTL定义的最低高电平标准了;而上拉时,就算上拉电阻达到20kΩ,也丝毫不影响输出。
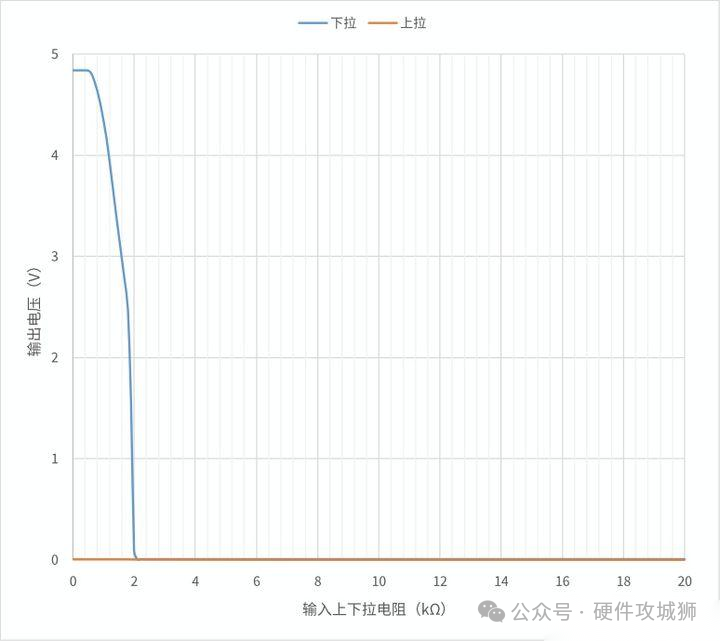
上表,TTL上下拉电阻取值与输出电压的关系
CMOS电路
相信现在已经没多少人会在设计时选用TTL家族的器件了,可能多数人都没接触过这类器件,最常用的还是CMOS家族(HC、HCT、LVC、CD4000等)。
CMOS家族的东西就比较简单粗暴,上下对称的结构,上下管驱动能力也基本一致,这个时候输出的上下拉电阻对增强驱动能力几乎没有帮助不说,还加重了负载,属于得不偿失(其实多数情况下是无关痛痒)。
下图是基本的CMOS反相器,只需要一对互补的MOS管即可实现(现实中的CMOS反相器一般是三对这种管子级联出来的,为了提高开环增益)。
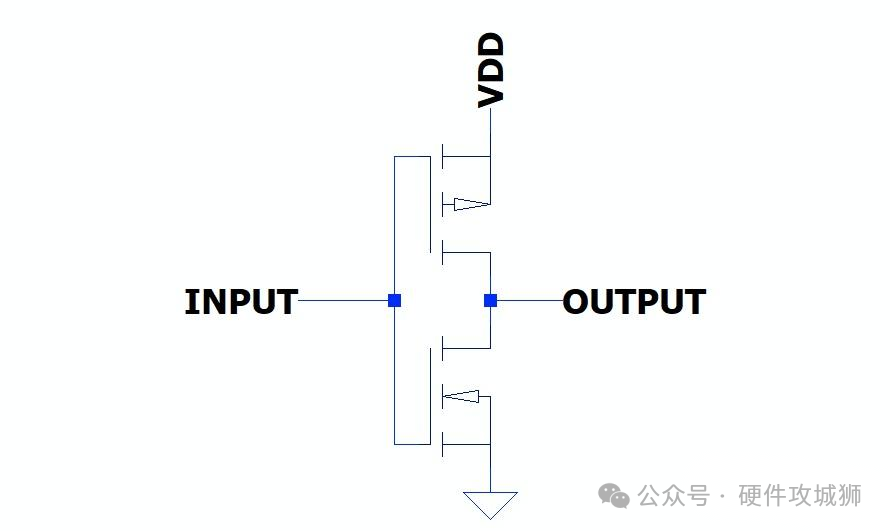
但是CMOS器件的输入悬空时,不会被拉向任何一个方向,处于一种浮空的状态,这样会造成输出紊乱,不是我们所希望的结果,这种情况下需要在输入端接入上拉或者下拉电阻给电路提供一个确定的状态。一般可拔插的对外接口(如JTAG)需要在I/O上加上上下拉电阻,有三态的总线视工作情况也可能需要上下拉,不过大多数的CMOS电路不需要额外的上下拉电阻。
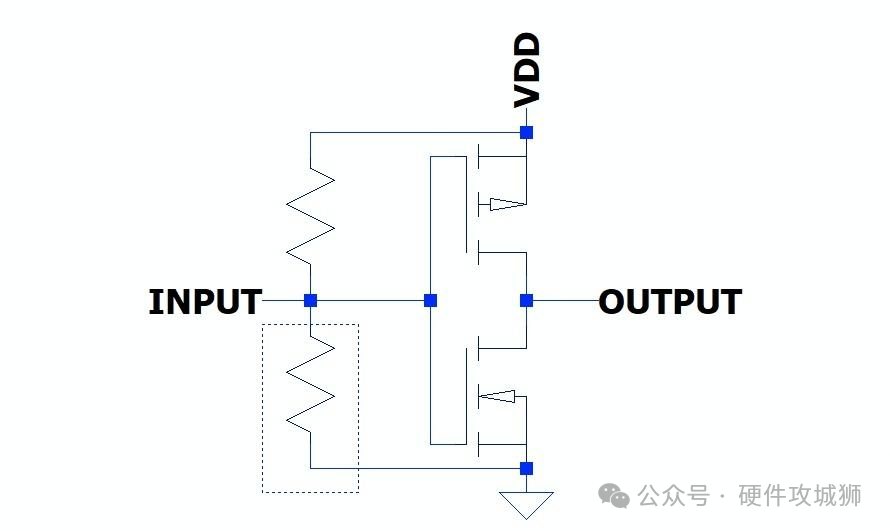
上图,CMOS器件在使用是一般要加上下来避免输入悬空
因为CMOS输入是电压控制型,输入阻抗很高,所以上下拉电阻的值可以很大,理论上用MΩ级别的电阻都没问题。
不过理论归理论,工程师得认清现实。现实的CMOS输入结构,为了保护MOS管的栅极,会在栅极上加入ESD二极管,二极管反向偏置的时候是有漏电流的,还会随温度的升高还会指数增长!所以CMOS电路的上下拉电阻一般在100kΩ以下,一些制程比较先进的CPU,I/O口的漏电流或者上下拉电流较大,上下拉电阻一般取在几kΩ级别。所以设计上下拉电阻前一定要仔细阅读芯片手册,查查I/O的输入电流,看看取什么样的电阻值才合理。
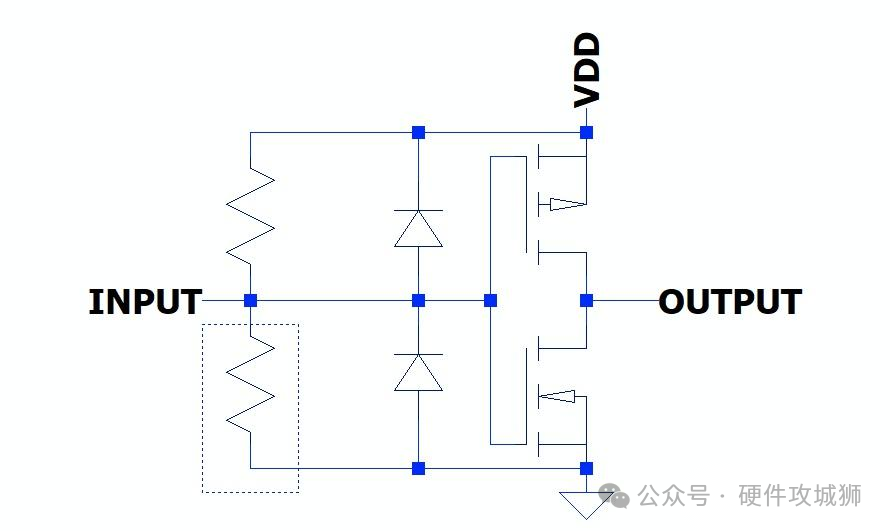
上图,CMOS输入有ESD二极管
其他需要上下拉的情况
开集(Open-Collector)和开漏(Open-Drain)的输出结构往往也需要加上拉电阻:理清推挽、开漏、OC、OD的特点与应用。OC和OD输出结构只有下管,所以只能输出L和高阻(Hi-Z)两种状态,而高阻态是难以被电路识别的,所以需要合适的上拉电阻把高阻态转变为高态。
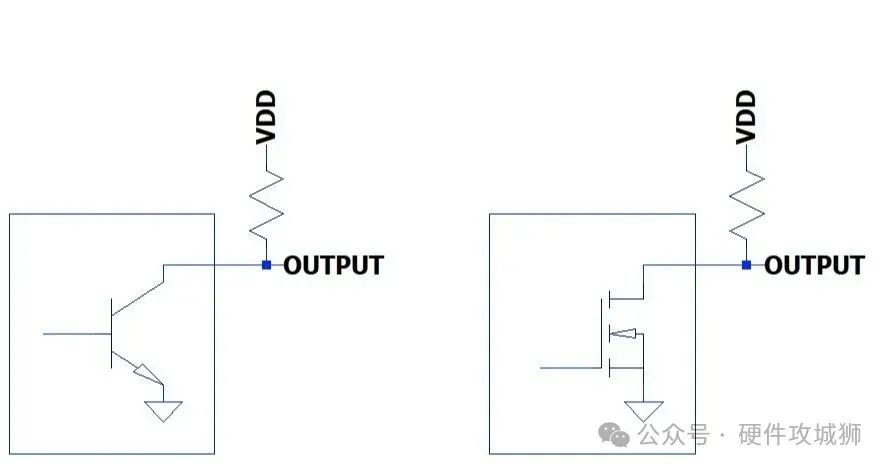
上图,OC(左)和OD(右)输出结构
虽然OC和OD输出结构看起来很复古,使用时也需要外接电阻有点麻烦,但这种结构最大的好处就是可以做线与,也就是多个OC或者OD可以接到一起,只要其中一个输出L,总线就是L,这在多外设中断和电源时序控制方面很常用。
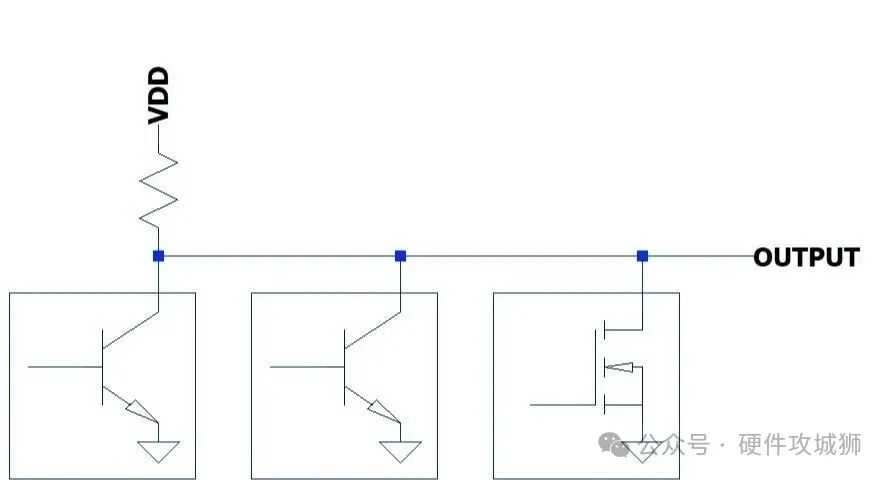
上图,OC/OD的线与接法
I2C也是OC/OD结构,这样很轻松就能在一条数据线上双向传输数据而不需要额外的方向控制信号,而CAN总线则巧妙地利用线与特性来实现总线仲裁。
在处理OC或者OD电路的时候,一定要注意评估总线负载电容、上拉电阻与所需速度的关系,负载电容越大,速度越快,所需的上拉电阻要越小:通俗理解STM32中的上/下拉电阻。比如I2C总线,如果只挂载了一片从设备,使用4.75kΩ的上拉电阻可能就满足400kHz的总线要求了,但如果挂了10片从设备呢,1kΩ的上拉电阻也不一定能搞定100kHz的总线速度,这种时候可能得考虑总线负载隔离或者降低总线速度了。
下图是在200pF负载电容情况下,上拉电阻为500Ω、1kΩ、2kΩ、4.75kΩ和10kΩ下的波形,可以看到上拉电阻越大,对电容充电速度越慢,所以上升沿也越慢,当上拉电阻不合适时上升沿已经严重变形,无法保证正常工作。
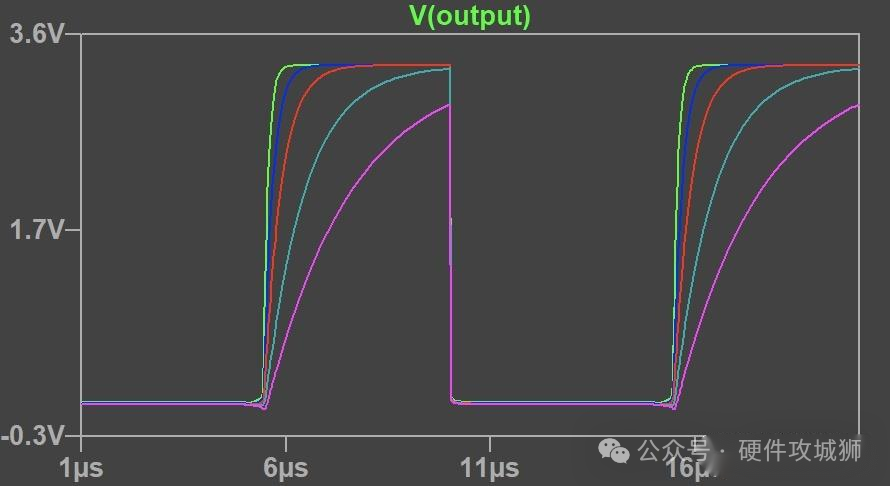
上图,OC电路不同上拉电阻对波形的影响
逻辑反相器可以当成放大器来用!不是开玩笑,我还真见过产品上用这种骚操作的,只需要把反相器接成反向放大器就可以了,不过逻辑器件当线性器件用,性能嘛...
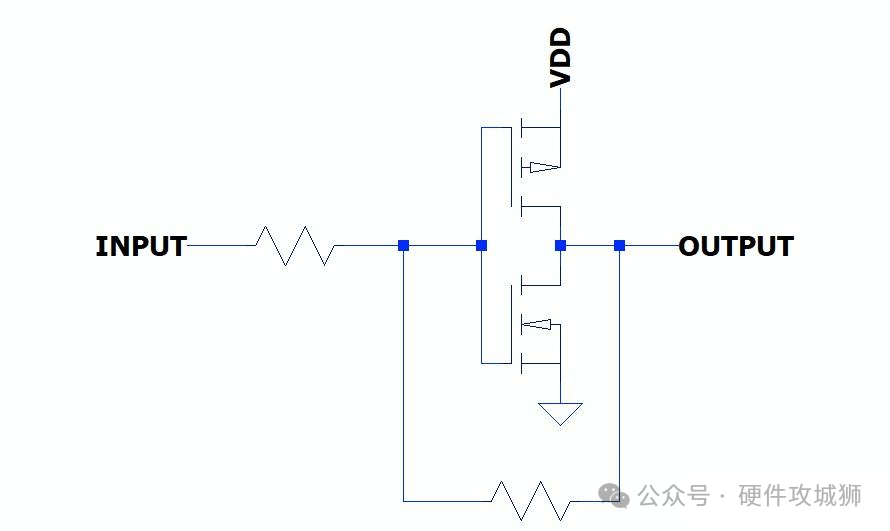
上图,逻辑反相器(非门)当成线性放大器用
单片机I/O口驱动,为什么一般都选用三极管而不是MOS管?
这里其实有两个问题:
1.单片机为什么不直接驱动负载?
2.单片机为什么一般选用三极管而不是MOS管?
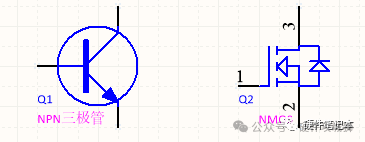
图1
答:
1.单片机的IO口,有一定的带负载能力。但电流很小,驱动能力有限,一般在10-20mA以内。所以一般不采用单片机直接驱动负载这种方式。
2.至于单片机为什么一般选用三极管而不是MOS管?需要了解三极管和MOS管的区别,如下:
①三极管是电流控制型,三极管基极驱动电压只要高于Ube(一般是0.7V)就能导通。
②MOS管是电压控制型,驱动电压必须高于阈值电压Vgs(TH)才能正常导通,不同MOS管的阈值电压是不一样的,一般为3-5V左右,饱和驱动电压可在6-8V。
我们再来看实际应用:
处理器一般讲究低功耗,供电电压也越来越低,一般单片机供电为3.3V,所以它的I/O最高电压也就是3.3V。
①直接驱动三极管
3.3V电压肯定是大于Ube的,所以直接在基极串联一个合适的电阻,让三极管工作在饱和区就可以了。Ib=(VO-0.7V)/R2。
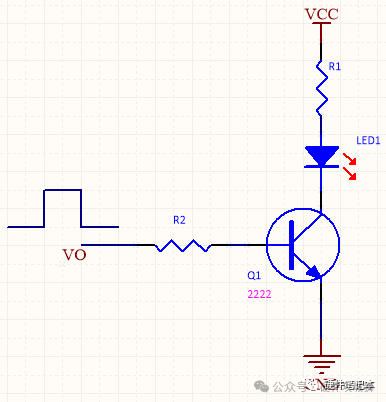
图2 驱动三极管示意图
②驱动MOS管
通过前面也了解到,MOS管的饱和电压>3.3V,如果用3.3V来驱动的话,很可能MOS管根本就打不开,或者处于半导通状态。
在半导通状态下,管子的内阻很大,驱动小电流负载可以这么用。但是大电流负载就不行了,内阻大,管子的功耗大,MOS管很容易就烧坏了。
所以,一般选择I/O口直接控制三极管,然后再控制MOS管。
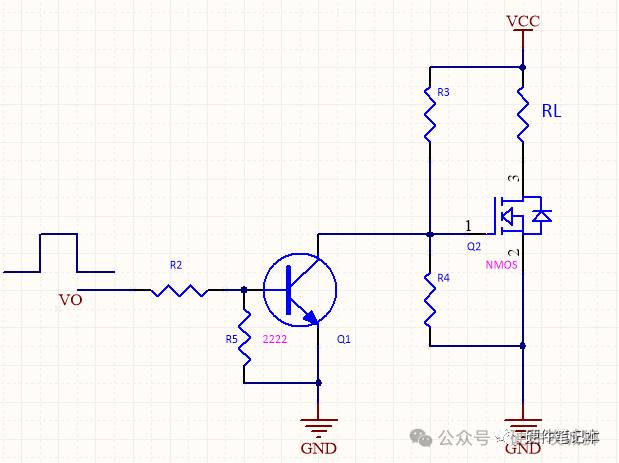
图3 I/O口驱动三极管后再驱动MOS管
当I/O为高电平时,三极管导通,MOS管栅极被拉低,负载RL不工作。
当I/O为低电平时,三极管不导通,MOS管通过电阻R3,R4分压,为栅极提供合适的阈值电压,MOS管导通,负载RL正常工作。
为什么要这样操作呢?一定要用三极管来驱动MOS管吗?
那是因为三极管带负载的能力没有MOS管强,当负载电流有要求时,必须要用MOS管来驱动。
那可以用I/O口直接驱动MOS管吗?答案是可以的,但这种型号不好找,这里给大家推荐一个NMOS型号:DMN6140L-13(因为用的少,目前就知道这个型号)。
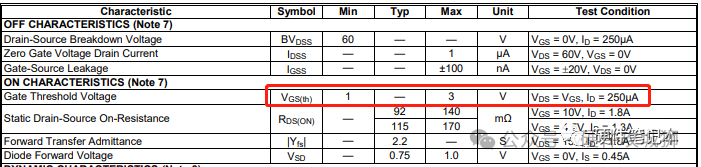
图4 DMN6140L-13阈值电压
这个管子的阈值电压是1V,3.3V的时候可以完全导通,导通时的最大电流大约2.3A的样子。
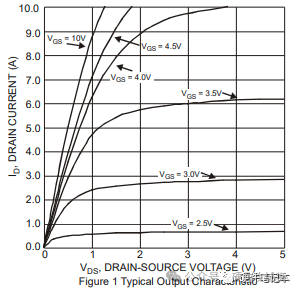
图5 DMN6140L-13导通电流
我们再来看看,常用的NPN三极管LMBT2222ALT1G的带载能力,最大电流IC=600mA。
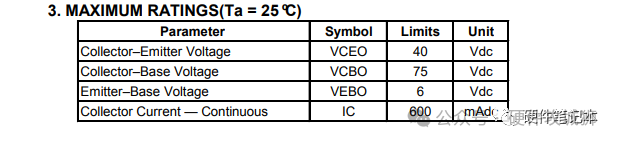
图6 LMBT2222ALT1G导通电
可见MOS管的驱动能力是三极管4倍,所以对负载电流有要求的都使用MOS管。
那他们的价格相差多少呢?在立创上搜了一下,MOS管的三极管的价格几乎是三极管的6倍
所以,在要求不高,成本低的应用场合,一般使用三极管作为开关管。
驱动波形实例调试
首先,供电正常,确保没有虚焊或短路。但当我测试Vgs波形的时候,有点不敢相信自己的眼睛,如下图。一般来说,MOS管驱动波形出现振荡是很正常的现象,但是振荡的这么厉害,波形根本没法看,不能正常工作。
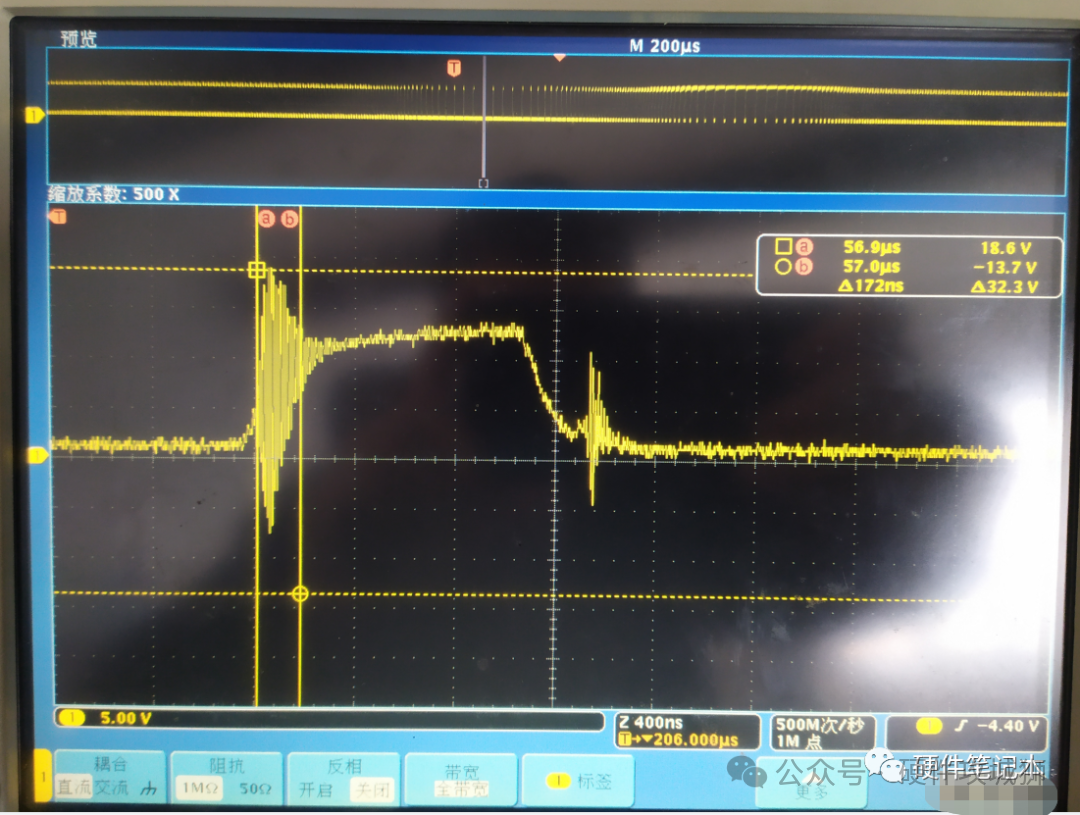
图二 样板驱动波形
用红外测试仪监测了MOS管温度,温升瞬间升到几十度,还好我反应快,马上就断掉了开关,不然办公室又得开始放鞭炮了。
三、原因查找:
我猜想会不会是驱动芯片本身有问题?
于是我用示波器直接测了驱动芯片的输出波形,如下图,波形正常。
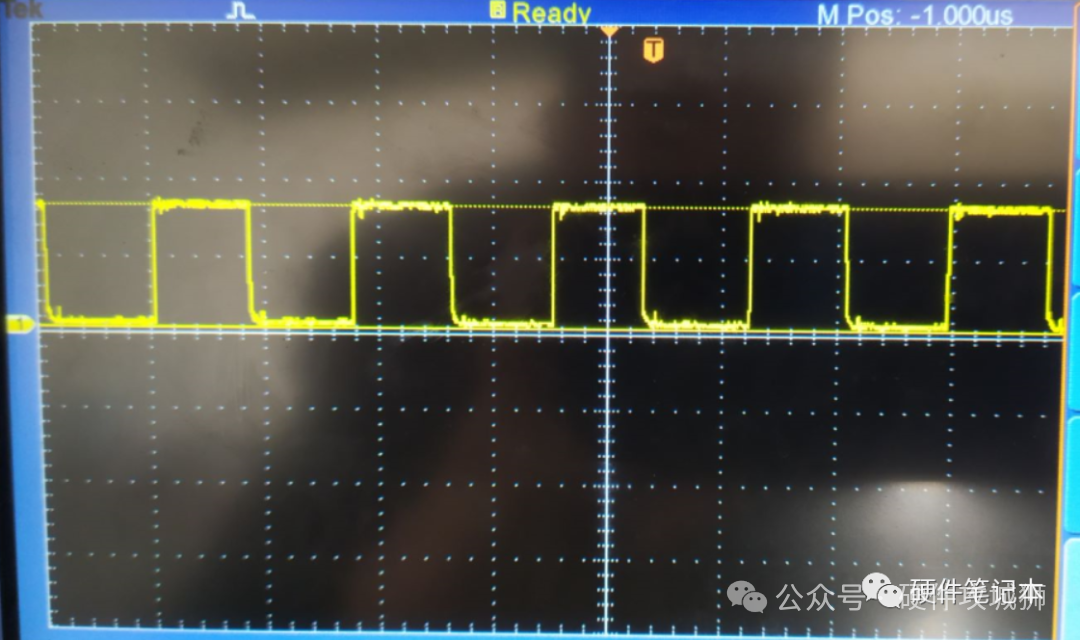
图三 驱动芯片输出波形
那问题会不会出在驱动布板上,仔细查看了驱动部分的PCB,MOS管的回路尽量短,也都进行了包地处理,跟之前布板差别不大,所以排除PCB布板的问题。
于是我又尝试调整了驱动电阻的阻值,因为这个电阻的大小对管子的振荡影响很大。多测调试无果。
那唯一的不同之处在于驱动部分单独做成一个小板插在主板上。我判断大概率问题出在这里,于是重新打板将驱动直接画在主板上。事实证明我的判断是正确的,测得驱动波形如下图,波形很漂亮,有木有?
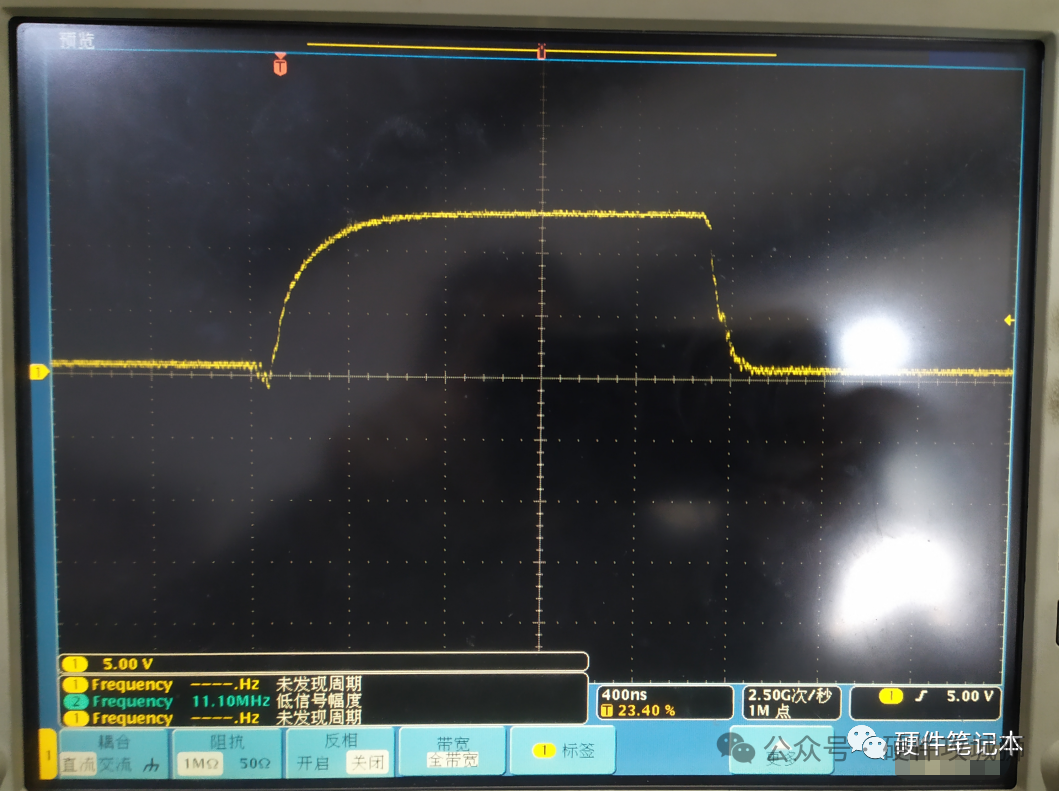
图四 PCB更改后样板驱动波形
四、原因分析:
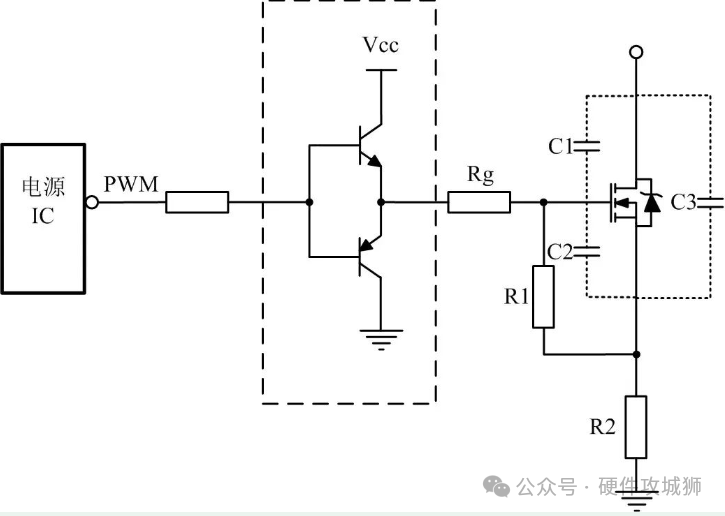
先简单介绍一下我们所使用的驱动电路。如下所示。该电路一直量产至少上万片,所以这个电路肯定是没问题的。
当驱动PWM为高时,通过R3→D1→C2→R2→GND,给MOS管充电。
当驱动PWM为低时,通过C2→R4→Q1→GND,MOS管放电。
管子做到快开慢关。一般电阻R3小于R4,阻值为几欧姆。
R1的作用是防止静电击穿,为静电提供释放回路,一般为10K左右。
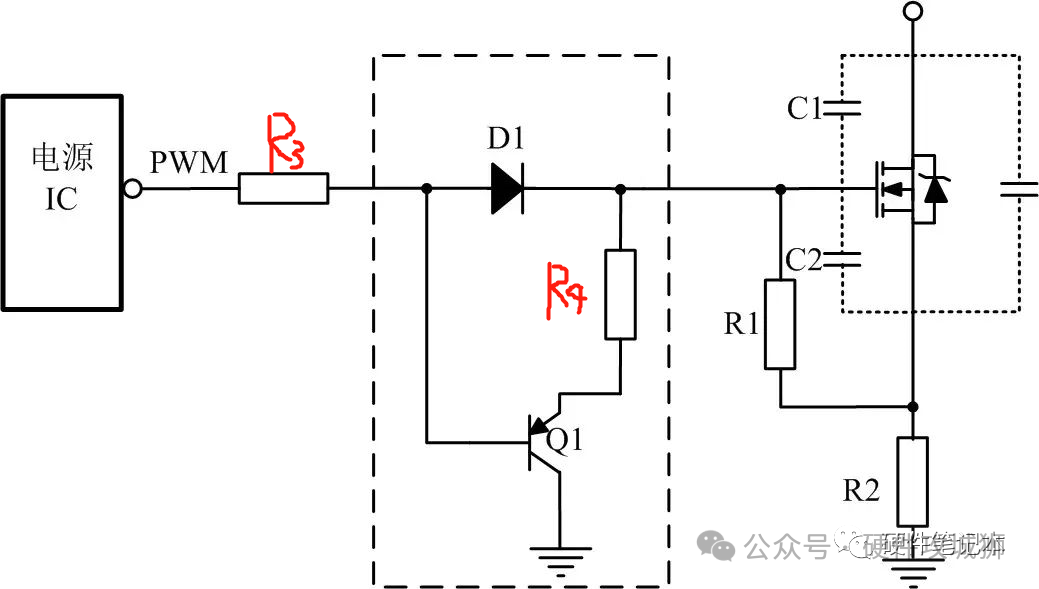
图五 驱动电路图
再回到我们的问题上,为什么将驱动插在小板上,驱动波形会变差,会振荡的那么厉害呢?
实际上这个振荡是由R3,L1和C2串联振荡引起的。其中,L1是驱动芯片输出到栅极之间的寄生电感,这个距离越远,L1越大。驱动做成小板通过插针的形式连接,其实就是增大了这个距离,也就是增大了电感L1,所以就振荡的特别厉害。
电阻R3的作用主要起到阻尼振荡的作用,让管子导通的不那么快,吸收管子的振荡尖峰。阻值越大,振荡越小,但效率也会降低。
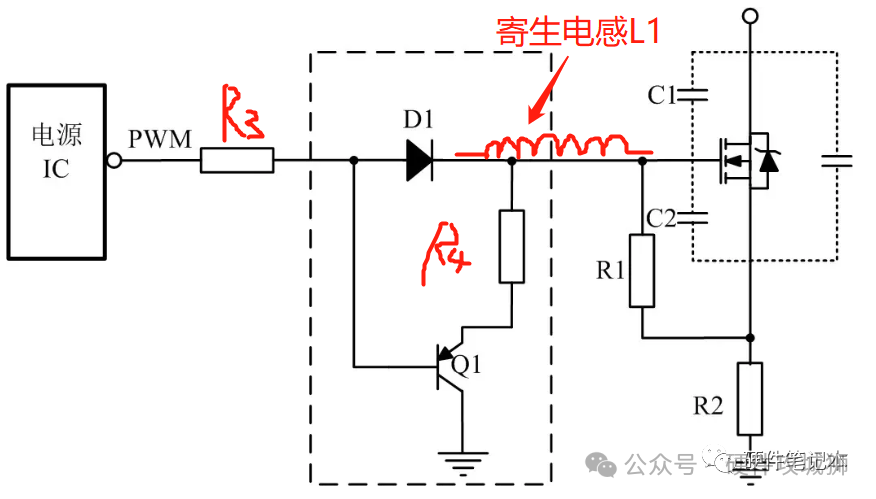
图六 驱动电路中的寄生电感
最后,驱动电路部分一定要注意的几个细节:
1.布局时,驱动部分一定要靠近MOS管且MOS管的驱动回路面积要尽量短,减小寄生电感的影响。
2.MOS管选型时,输入电容C2和密勒电容C1尽量选择容值比较小的。
3.调试时,可通过改变R3的阻值来改变驱动波形的振荡。
-
二极管
+关注
关注
149文章
10493浏览量
180010 -
TTL
+关注
关注
7文章
558浏览量
75145 -
晶体管
+关注
关注
78文章
10470浏览量
148904 -
逻辑门电路
+关注
关注
2文章
69浏览量
12579
原文标题:驱动电路、驱动能力详解
文章出处:【微信号:mcu168,微信公众号:硬件攻城狮】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
逻辑门电路基本概念介绍
NMOS逻辑门电路工作原理
CMOS逻辑门电路




评论