 电子DIY作品 基于FPGA的GPS授时日历时钟
电子DIY作品 基于FPGA的GPS授时日历时钟
安信可技术论坛官方B站账号来啦
提前关注不迷路
在这里优先预告各类活动、教程
以下作品由安信可社区用户
一只呆头鹅制作
实验目的
使用安信可科技的 GP-01 模块实现卫星授时,显示在数码管上。
程序设计思路
GP01 模块有 24 个接口,写代码的时候只需要关注 TX 引脚,GP-01 模块获得的数据送到 FPGA,使用状态机获取我们想要的年月日、实时时间。此时得到的时间是 UTC 时间,并不是我们想要的北京时间,我们只需要在小时上加八,然后就把数据传到数码管显示就可以了。
代码
串口接收模块
把 GP01 的单比特数据转换成八比特的数据。
module uart_rx
#(
parameter UART_BPS = 'd9600, //串口波特率
parameter CLK_FREQ = 'd50_000_000 //时钟频率
)
(
input wire sys_clk , //系统时钟50MHz
input wire sys_rst_n , //全局复位
input wire rx , //串口接收数据
output reg [7:0] po_data , //串转并后的8bit数据
output reg po_flag //串转并后的数据有效标志信号
);
//********************************************************************//
//****************** Parameter and Internal Signal *******************//
//********************************************************************//
//localparam define
localparam BAUD_CNT_MAX = CLK_FREQ/UART_BPS ;
//reg define
reg rx_reg1 ;
reg rx_reg2 ;
reg rx_reg3 ;
reg start_nedge ;
reg work_en ;
reg [12:0] baud_cnt ;
reg bit_flag ;
reg [3:0] bit_cnt ;
reg [7:0] rx_data ;
reg rx_flag ;
//********************************************************************//
//***************************** Main Code ****************************//
//********************************************************************//
//插入两级寄存器进行数据同步,用来消除亚稳态
//rx_reg1:第一级寄存器,寄存器空闲状态复位为1
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
rx_reg1 <= 1'b1;
else
rx_reg1 <= rx;
//rx_reg2:第二级寄存器,寄存器空闲状态复位为1
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
rx_reg2 <= 1'b1;
else
rx_reg2 <= rx_reg1;
//rx_reg3:第三级寄存器和第二级寄存器共同构成下降沿检测
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
rx_reg3 <= 1'b1;
else
rx_reg3 <= rx_reg2;
//start_nedge:检测到下降沿时start_nedge产生一个时钟的高电平
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
start_nedge <= 1'b0;
else if((~rx_reg2) && (rx_reg3))
start_nedge <= 1'b1;
else
start_nedge <= 1'b0;
//work_en:接收数据工作使能信号
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
work_en <= 1'b0;
else if(start_nedge == 1'b1)
work_en <= 1'b1;
else if((bit_cnt == 4'd8) && (bit_flag == 1'b1))
work_en <= 1'b0;
//baud_cnt:波特率计数器计数,从0计数到BAUD_CNT_MAX - 1
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
baud_cnt <= 13'b0;
else if((baud_cnt == BAUD_CNT_MAX - 1) || (work_en == 1'b0))
baud_cnt <= 13'b0;
else if(work_en == 1'b1)
baud_cnt <= baud_cnt + 1'b1;
//bit_flag:当baud_cnt计数器计数到中间数时采样的数据最稳定,
//此时拉高一个标志信号表示数据可以被取走
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
bit_flag <= 1'b0;
else if(baud_cnt == BAUD_CNT_MAX/2 - 1)
bit_flag <= 1'b1;
else
bit_flag <= 1'b0;
//bit_cnt:有效数据个数计数器,当8个有效数据(不含起始位和停止位)
//都接收完成后计数器清零
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
bit_cnt <= 4'b0;
else if((bit_cnt == 4'd8) && (bit_flag == 1'b1))
bit_cnt <= 4'b0;
else if(bit_flag ==1'b1)
bit_cnt <= bit_cnt + 1'b1;
//rx_data:输入数据进行移位
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
rx_data <= 8'b0;
else if((bit_cnt >= 4'd1)&&(bit_cnt <= 4'd8)&&(bit_flag == 1'b1))
rx_data <= {rx_reg3, rx_data[7:1]};
//rx_flag:输入数据移位完成时rx_flag拉高一个时钟的高电平
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
rx_flag <= 1'b0;
else if((bit_cnt == 4'd8) && (bit_flag == 1'b1))
rx_flag <= 1'b1;
else
rx_flag <= 1'b0;
//po_data:输出完整的8位有效数据
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
po_data <= 8'b0;
else if(rx_flag == 1'b1)
po_data <= rx_data;
//po_flag:输出数据有效标志(比rx_flag延后一个时钟周期,为了和po_data同步)
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
po_flag <= 1'b0;
else
po_flag <= rx_flag;
endmodule
获取日历、时间模块
因为 GP01 模块获取的数据不光只有日历和时间数据,所以需要用一个状态机来判断接收到的数据是不是日历、时间数据。
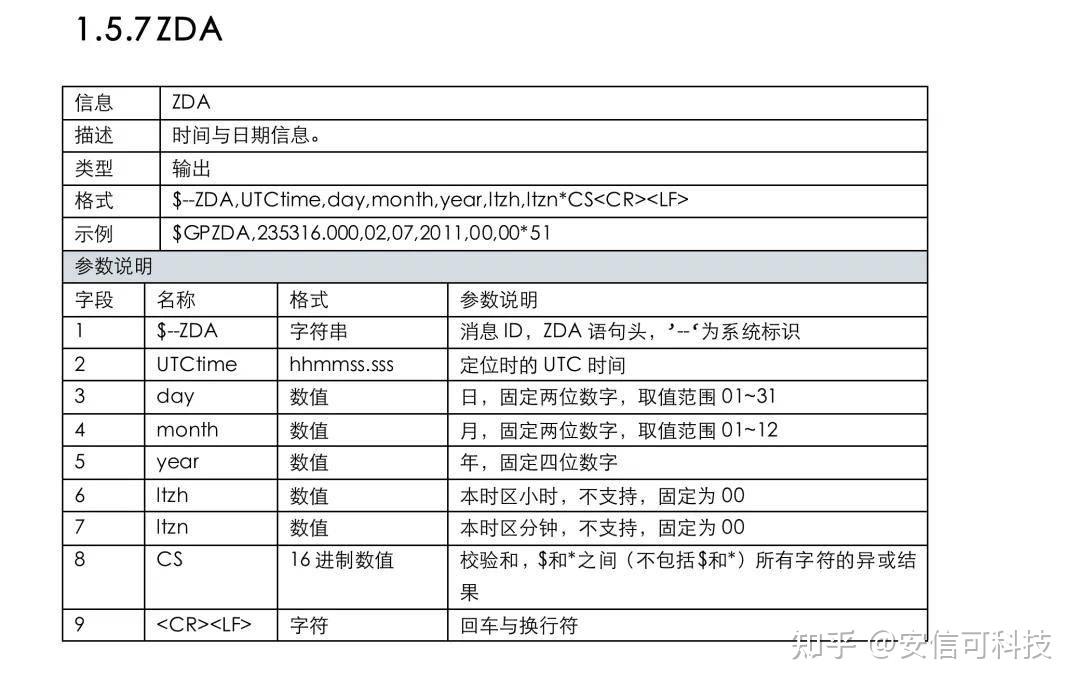
EMEA 协议中的时间与日历信息格式如图所示:
module Data_processing (
input wire sys_clk ,
input wire sys_rst_n ,
input wire uart_recv_done,
input wire [7:0] uart_recv_data,
output reg [31:0] time_data ,
output reg [31:0] calendar_data ,
output reg led3 ,
output reg led2 ,
output reg led
);
reg [8:0] state ;
reg [31:0] time_data_temp;
reg [31:0] calendar_temp ;
wire [7:0] recv_time ;
wire [7:0] recv_calendar ;
parameter WATI = 9'b0000_0000_0;
parameter IDLE = 9'b0000_0000_1;
parameter ONE = 9'b0000_0001_0;
parameter TWO = 9'b0000_0010_0;
parameter THREE= 9'b0000_0100_0;
parameter FOUR = 9'b0000_1000_0;
parameter FIVE = 9'b0001_0000_0;
parameter SIX = 9'b0010_0000_0;
parameter SIX_1 = 9'b0010_0000_1;
parameter SIX_2 = 9'b0010_0001_0;
parameter SIX_3 = 9'b0010_0001_1;
parameter SIX_4 = 9'b0010_0010_0;
parameter SIX_5 = 9'b0010_0010_1;
parameter SIX_6 = 9'b0010_0011_0;
parameter SIX_7 = 9'b0010_0011_1;
parameter SIX_8 = 9'b0010_0100_0;
parameter SIX_9 = 9'b0010_0100_1;
parameter SEVEN = 9'b0100_0000_0;
parameter SEVEN_1 = 9'b0100_0000_1;
parameter SEVEN_2 = 9'b0100_0001_0;
parameter SEVEN_3 = 9'b0100_0001_1;
parameter SEVEN_4 = 9'b0100_0010_0;
parameter SEVEN_5 = 9'b0100_0010_1;
parameter SEVEN_6 = 9'b0100_0011_0;
parameter SEVEN_7 = 9'b0100_0011_1;
parameter SEVEN_8 = 9'b0100_0100_0;
parameter SEVEN_9 = 9'b0100_0100_1;
parameter SEVEN_10 = 9'b0100_1001_0;
parameter EIGHT= 9'b1000_0000_0 ;
parameter TEN = 9'b1000_0000_1 ;
parameter CNT_MAX = 23'd7_500_000 ;
assign recv_time = uart_recv_data - 8'd48; //ascll码 0-9
assign recv_calendar = uart_recv_data - 8'd48;
always @(posedge sys_clk or negedge sys_rst_n) begin //这里的状态机用来接收日历和时间
if (sys_rst_n == 1'b0) begin
state <= WATI;
end
else if( uart_recv_done == 1'd1) begin
case (state)
WATI : begin
if ((uart_recv_data == 8'h24)) state <= IDLE ; else if ((uart_recv_data == 8'h47) ) state <= ONE; else state <= WATI; //固定格式 $GPZDA,
end
IDLE : state <= ((uart_recv_data == 8'h47)) ? ONE : WATI;
ONE : state <= ((uart_recv_data == 8'h4E)) ? TWO : WATI;
TWO : state <= ((uart_recv_data == 8'h5A)) ? THREE : WATI;
THREE : state <= ((uart_recv_data == 8'h44)) ? FOUR : WATI;
FOUR : state <= ((uart_recv_data == 8'h41)) ? FIVE : WATI;
FIVE : state <= ((uart_recv_data == 8'h2C)) ? SIX : WATI;
SIX : state <= ((uart_recv_data != 8'h2C)) ? SIX_1 : WATI; //时间 //
SIX_1 : state <= ((uart_recv_data != 8'h2C)) ? SIX_2 : WATI;
SIX_2 : state <= ((uart_recv_data != 8'h2C)) ? SIX_3 : WATI;
SIX_3 : state <= ((uart_recv_data != 8'h2C)) ? SIX_4 : WATI;
SIX_4 : state <= ((uart_recv_data != 8'h2C)) ? SIX_5 : WATI;
SIX_5 : state <= ((uart_recv_data != 8'h2C)) ? SIX_6 : WATI;
SIX_6 : state <= ((uart_recv_data == 8'h2E)) ? SIX_7 : WATI; //.
SIX_7 : state <= ((uart_recv_data == 8'h30)) ? SIX_8 : WATI; //000
SIX_8 : state <= ((uart_recv_data == 8'h30)) ? SIX_9 : WATI;
SIX_9 : state <= ((uart_recv_data == 8'h30)) ? SEVEN : WATI;
SEVEN : state <= ((uart_recv_data == 8'h2C) ) ? SEVEN_1 : WATI; //,
SEVEN_1 : state <= ((uart_recv_data != 8'h2C) ) ? SEVEN_2 : WATI; //日
SEVEN_2 : state <= ((uart_recv_data != 8'h2C) ) ? SEVEN_3 : WATI;
SEVEN_3 : state <= ((uart_recv_data == 8'h2C) ) ? SEVEN_4 : WATI;
SEVEN_4 : state <= ((uart_recv_data != 8'h2C) ) ? SEVEN_5 : WATI; //月
SEVEN_5 : state <= ((uart_recv_data != 8'h2C) ) ? SEVEN_6 : WATI;
SEVEN_6 : state <= ((uart_recv_data == 8'h2C) ) ? SEVEN_7 : WATI;
SEVEN_7 : state <= ((uart_recv_data != 8'h2C) ) ? SEVEN_8 : WATI; //年
SEVEN_8 : state <= ((uart_recv_data != 8'h2C) ) ? SEVEN_9 : WATI;
SEVEN_9 : state <= ((uart_recv_data != 8'h2C) ) ? SEVEN_10 : WATI;
SEVEN_10 : state <= ((uart_recv_data != 8'h2C) ) ? EIGHT : WATI;
EIGHT : state <= ((uart_recv_data == 8'h2C) ) ? TEN : WATI;
TEN : state <= ((uart_recv_data == 8'h30) ) ? WATI : WATI;
default: state <= WATI;
endcase
end
end
always @(posedge sys_clk or negedge sys_rst_n) begin
if (sys_rst_n == 1'b0) begin
led <= 1'b0;
end
else if((state == FIVE) && (uart_recv_done == 1'b1))
led <= ~led;
else
led <= led;
end
always @(posedge sys_clk or negedge sys_rst_n) begin
if (sys_rst_n == 1'b0) begin
led2 <= 1'b0;
end
else if((state == SEVEN) && (uart_recv_done == 1'b1))
led2 <= ~led2;
else
led2 <= led2;
end
always @(posedge sys_clk or negedge sys_rst_n) begin
if (sys_rst_n == 1'b0) begin
led3 <= 1'b0;
end
else if((state == EIGHT) && (uart_recv_done == 1'b1))
led3 <= ~led3;
else
led3 <= led3;
end
always @(posedge sys_clk or negedge sys_rst_n) begin //
if (sys_rst_n == 1'b0)
time_data_temp <= 32'b0;
else if(state == SIX )
time_data_temp <= {recv_time[3:0],time_data_temp[27:0]};
else if(state == SIX_1 )
time_data_temp <= {time_data_temp[31:28],recv_time[3:0],time_data_temp[23:0]};
else if(state == SIX_2 )
time_data_temp <= {time_data_temp[31:20],recv_time[3:0],time_data_temp[15:0]};
else if(state == SIX_3 )
time_data_temp <= {time_data_temp[31:16],recv_time[3:0],time_data_temp[11:0]};
else if(state == SIX_4 )
time_data_temp <= {time_data_temp[31:8],recv_time[3:0],time_data_temp[3:0]};
else if(state == SIX_5 )
time_data_temp <= {time_data_temp[31:4],recv_time[3:0]};
else
time_data_temp <= {time_data_temp[31:24],4'd10,time_data_temp[19:12],4'd10,time_data_temp[7:0]};
end
always @(posedge sys_clk or negedge sys_rst_n) begin
if (sys_rst_n == 1'b0)
calendar_temp <= 32'd0;
else if(state == SEVEN_1)
calendar_temp <= {calendar_temp[31:8],recv_calendar[3:0],calendar_temp[3:0]};
else if(state == SEVEN_2)
calendar_temp <= {calendar_temp[31:4],recv_calendar[3:0]};
else if(state == SEVEN_4)
calendar_temp <= {calendar_temp[31:16],recv_calendar[3:0],calendar_temp[11:0]};
else if(state == SEVEN_5)
calendar_temp <= {calendar_temp[31:12],recv_calendar[3:0],calendar_temp[7:0]};
else if(state == SEVEN_7)
calendar_temp <= {recv_calendar[3:0],calendar_temp[27:0]};
else if(state == SEVEN_8)
calendar_temp <= {calendar_temp[31:28],recv_calendar[3:0],calendar_temp[23:0]};
else if(state == SEVEN_9)
calendar_temp <= {calendar_temp[31:24],recv_calendar[3:0],calendar_temp[19:0]};
else if(state == SEVEN_10)
calendar_temp <= {calendar_temp[31:20],recv_calendar[3:0],calendar_temp[15:0]};
end
always @(posedge sys_clk or negedge sys_rst_n) begin
if (sys_rst_n == 1'b0) begin
calendar_data <= 32'b0;
end
else if((state == TEN) && (uart_recv_done == 1'b1) )
calendar_data <= calendar_temp;
else
calendar_data <= calendar_data;
end
always @(posedge sys_clk or negedge sys_rst_n) begin
if (sys_rst_n == 1'b0) begin
time_data <= 32'b0;
end
else if((state == SEVEN) && (uart_recv_done == 1'b1) )
time_data <= time_data_temp;
else
time_data <= time_data;
end
endmodule //Data_processing
UTC 处理模块
这里是将 UTC 时间转换成北京时间,日历与时间每隔五秒切换一次。
module display (
input wire sys_clk ,
input wire sys_rst_n ,
input wire [31:0] time_data ,
input wire [31:0] calendar_data ,
output wire [31:0] display_data
);
localparam COUNT_MAX = 50_000_000 ;
localparam CNT_10S_MAX = 6'd5 ;
reg [26:0] count ;
reg [3:0] cnt_500ms ;
reg display_flag ;
reg [31:0] time_data_temp ;
always @(posedge sys_clk or negedge sys_rst_n) begin
if (sys_rst_n == 1'b0) begin
count <= 0;
end else begin
if (count == COUNT_MAX - 1) begin
count <= 0;
end
else begin
count <= count + 27'd1;
end
end
end
always @(posedge sys_clk or negedge sys_rst_n) begin
if (sys_rst_n == 1'b0) begin
time_data_temp <= 32'd0;
end
else if (display_flag == 1'd1 && ((time_data[27:24] + 4'd8) >= 4'd10 ))begin //因为获取的时间是UTC时间转换成北京时间加上八就可以了
time_data_temp[31:28] <= time_data[31:28] + 4'd1;
time_data_temp[27:24] <= (time_data[27:24] + 4'd8) % 4'd10;
end
else if (display_flag == 1'd1 && time_data[27:24] + 4'd8 < 4'd10 )begin
time_data_temp[31:28] <= time_data[31:28];
time_data_temp[27:24] <= time_data[27:24]+ 4'd8;
end
else
time_data_temp <= {time_data_temp[31:24],time_data[23:0]};
end
always @(posedge sys_clk or negedge sys_rst_n) begin
if (sys_rst_n == 1'b0) begin
cnt_500ms <= 4'd0;
end
else if (cnt_500ms == CNT_10S_MAX) //5S
cnt_500ms <= 4'd0;
else if (count == COUNT_MAX - 1)
cnt_500ms <= cnt_500ms + 4'd1;
end
always @(posedge sys_clk or negedge sys_rst_n) begin
if (sys_rst_n == 1'b0) begin
display_flag <= 1'd0;
end
else if (cnt_500ms == CNT_10S_MAX) begin
display_flag <= ~display_flag;
end
else
display_flag <= display_flag;
end
assign display_data = display_flag ? calendar_data :time_data_temp;
endmodule //display
数码管显示模块
module smg (
input wire sys_clk ,
input wire sys_rst_n ,
input wire [31:0] smg_seg_in ,
output reg [7:0] smg_sel ,
output reg [7:0] smg_seg
);
localparam CNT_1MS_MAX = 16'd50_000 ;
reg [15:0] cnt_1ms ;
reg [3:0] flag_1ms ;
reg [3:0] data_disp ;
always @(posedge sys_clk or negedge sys_rst_n) begin
if(sys_rst_n==1'b0)
cnt_1ms<=16'b0;
else if (cnt_1ms==CNT_1MS_MAX-1)
cnt_1ms<=16'b0;
else
cnt_1ms<=cnt_1ms+16'b1;
end
always @(posedge sys_clk or negedge sys_rst_n) begin
if(sys_rst_n==1'b0)
flag_1ms<=4'b0;
else if ((cnt_1ms==CNT_1MS_MAX-1)&&(flag_1ms==7))
flag_1ms<=4'b0;
else if (cnt_1ms==CNT_1MS_MAX-1)
flag_1ms<=flag_1ms+4'b1;
else
flag_1ms<=flag_1ms;
end
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
data_disp <= 4'b0;
else case(flag_1ms)
4'd0: data_disp <= smg_seg_in[3:0] ;
4'd1: data_disp <= smg_seg_in[7:4] ;
4'd2: data_disp <= smg_seg_in[11:8] ;
4'd3: data_disp <= smg_seg_in[15:12];
4'd4: data_disp <= smg_seg_in[19:16];
4'd5: data_disp <= smg_seg_in[23:20];
4'd6: data_disp <= smg_seg_in[27:24];
4'd7: data_disp <= smg_seg_in[31:28];
default:data_disp <= 4'b0 ;
endcase
always @(posedge sys_clk or negedge sys_rst_n) begin
if(sys_rst_n ==1'b0)
smg_sel<=8'b1111_1110;
else case (flag_1ms)
0: smg_sel<=~8'b1111_1110;
1: smg_sel<=~8'b1111_1101;
2: smg_sel<=~8'b1111_1011;
3: smg_sel<=~8'b1111_0111;
4: smg_sel<=~8'b1110_1111;
5: smg_sel<=~8'b1101_1111;
6: smg_sel<=~8'b1011_1111;
7: smg_sel<=~8'b0111_1111;
default:smg_sel<=8'b1111_1110;
endcase
end
always @(posedge sys_clk or negedge sys_rst_n) begin
if(sys_rst_n ==1'b0)
smg_seg<=8'b1111_1100;
else case (data_disp)
1: smg_seg<=~8'b0110_0000;
2: smg_seg<=~8'b1101_1010;
3: smg_seg<=~8'b1111_0010;
4: smg_seg<=~8'b0110_0110;
5: smg_seg<=~8'b1011_0110;
6: smg_seg<=~8'b1011_1110;
7: smg_seg<=~8'b1110_0000;
8: smg_seg<=~8'b1111_1110;
9: smg_seg<=~8'b1111_0110;
0: smg_seg<=~8'b1111_1100;
10:smg_seg<=~8'b0000000001;
default:smg_seg<=8'b1111_1100;
endcase
end
endmodule //smg
视频演示
-
FPGA
+关注
关注
1629文章
21744浏览量
603607 -
gps
+关注
关注
22文章
2896浏览量
166263 -
DIY
+关注
关注
176文章
888浏览量
348661
发布评论请先 登录
相关推荐

wifi授时电子钟如何对时间
AT3340:可替换国外授时板,BDS/GPS双模授时板规格书
AT3340:支持BDS/GPS双模授时板datasheet

通信基站授时常用定位授时模块对比:ATGM332D-5T和ATGM331C-5T-发烧友
卫星授时安全隔离防护装置施工方案

同步时钟:北斗/GPS卫星、电信基站、NTP以太网校时方式的区别



stm32f051r8中RTC日历时钟如何将年月日时分秒转换成秒计数?
GPS卫星同步时钟的工作原理及应用场景介绍

同步时钟:北斗/GPS卫星、电信基站、NTP以太网等多种校时方式的区别






 工商网监
工商网监
评论