 脉冲全闭环EtherCAT运动控制器的固件升级
脉冲全闭环EtherCAT运动控制器的固件升级
本文导读
随着产品的发展,正运动技术产品的固件也在不断更新与完善,新固件较老固件会解决一些客户的新需求与软件上的bug,增加了一些指令和功能,添加了更多的EtherCAT从站与io模块。因此,升级固件是常用功能。推荐优先使用最新的RTSys软件。
本文以ZMC406R-V2运动控制器为例给大家介绍正运动固件升级的多种方式。
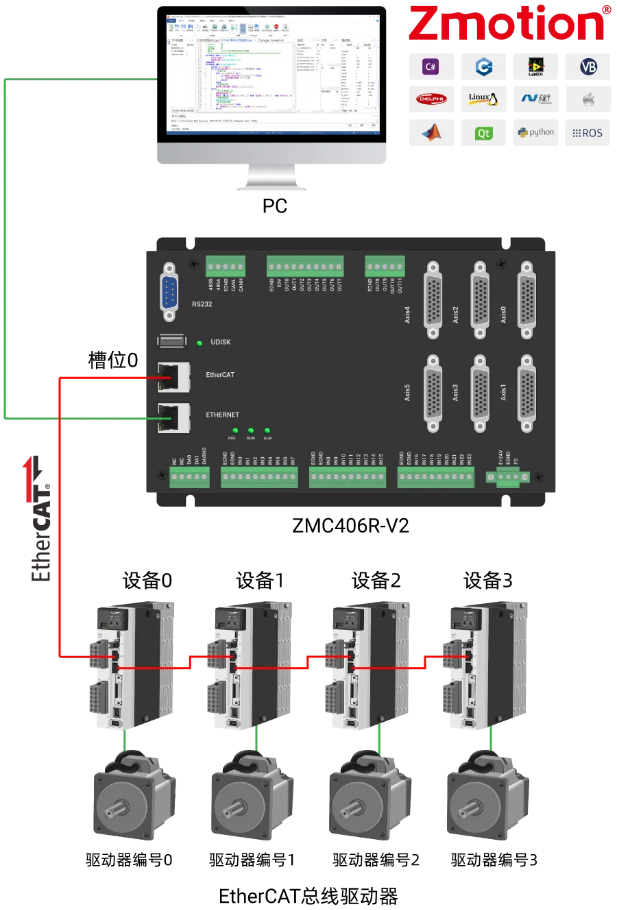
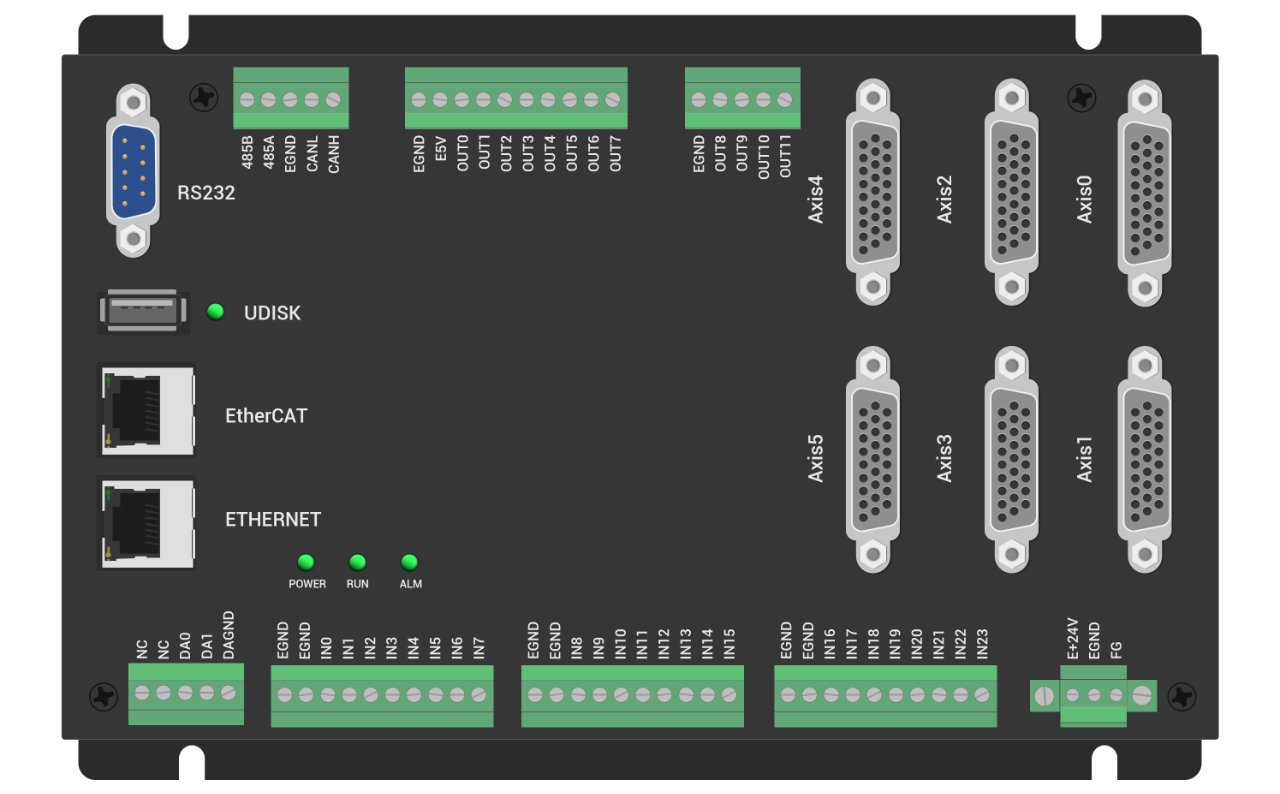
ZMC406R-V2 6轴总线型运动控制器
ZMC406R-V2是正运动技术推出的一款多轴高性能EtherCAT总线和脉冲型的独立式运动控制器,自带6轴本地差分脉冲轴,最多可扩展至32轴,能实现总线轴+脉冲轴混合插补的多轴运动控制场合。同时支持正运动远程显示功能,能提供网络组态显示,可实时监控和调整参数配置。

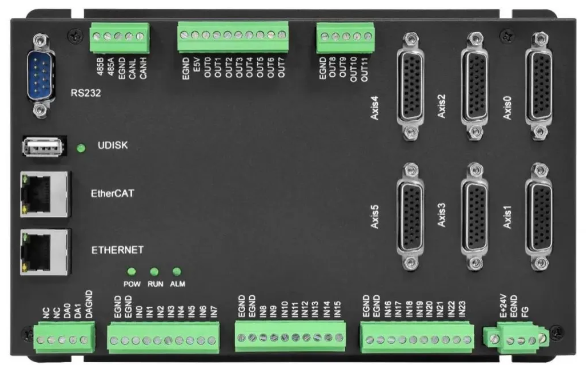
ZMC406R-V2硬件功能特性:
(1)支持6轴运动控制(脉冲+EtherCAT总线),EtherCAT最小通讯周期可达250us;
(2)24路通用输入、12路通用输出,2路模拟量输出(DA),其中包括2路高速输入和2路高速输出;
(3)6路10MHz高速差分脉冲输出,总线轴、脉冲轴可混合插补;
(5)内置多项实时性运动控制功能,例如视觉飞拍、多维PSO、高速位置锁存,多轴同步运行等;
(6)可通过EtherCAT扩展模块进行IO硬件资源扩展,可扩展至4096个隔离输入口和4096个隔离输出口;
(7)具备丰富的运动控制功能,如点位运动、电子凸轮、直线插补、圆弧插补、连续轨迹加工和30+种(SCARA、Delta、6 关节)机器人模型控制;
(8)支持掉电检测、掉电存储,多种程序加密方式,能够有效防止系统故障,保护项目工程文件数据,并提高系统的可靠性;
(9)通过纯国产IDE开发环境RTSys进行项目开发,可实时仿真、在线跟踪以及诊断与调试,简便易用,支持多种高级上位机语言联合编程进行二次开发。
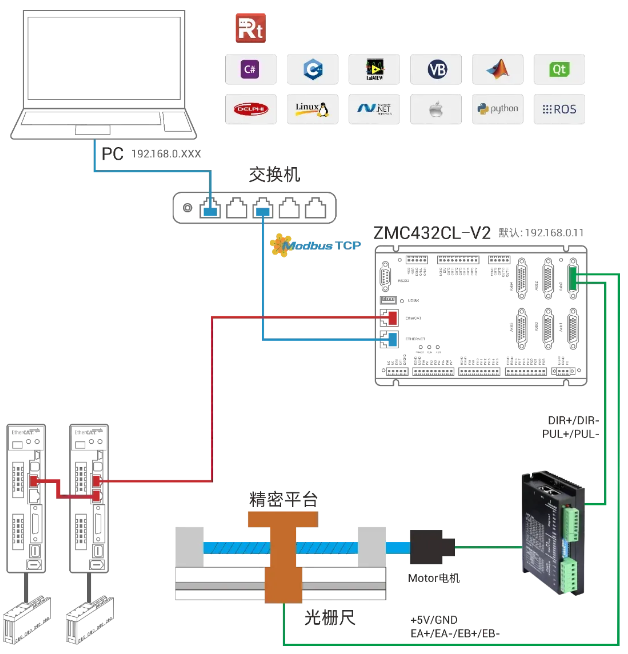
ZMC432CL-V2 脉冲全闭环的32轴总线型运动控制器
ZMC432CL-V2是一款高性能运动控制器,具备高速实时反馈功能,支持脉冲全闭环控制,能够实现高精度、高响应速度的运动控制。高精度定位,有效消除机械传动误差,满足高精密加工场景应用要求。
1.硬件功能特性
(1)丰富的运动控制功能:支持直线、圆弧、空间圆弧、螺旋插补等。
(2)硬件接口丰富:支持脉冲轴(带编码器反馈)和EtherCAT总线轴,具备24路输入和12路输出的通用IO,部分为高速IO,2路模拟量输出(DA)。
(3)EtherCAT刷新周期最快达250us,满足高速通信需求。
(4)支持4通道硬件比较输出、硬件定时器、运动中精准输出,适用于多通道视觉飞拍等场合。
(5)支持掉电检测、掉电存储,多种程序加密方式,能够有效防止系统故障,保护项目工程文件数据,并提高系统的可靠性。
(6)通过纯国产IDE开发环境RTSys进行项目开发,可实时仿真、在线跟踪以及诊断与调试,简便易用,支持多种高级上位机语言联合编程进行二次开发。
2.主要特点
(1)使用现成的API开发各种装备

(2)步进电机的外置光栅尺全闭环解决方案
①ZMC4系列高效的网口读写,PCIe/PCI系列卡可共享内存接口(共享内存的批量读写3-5us);
②内置反向间隙补偿,双向螺距补偿,2D平面补偿等;
③可以同时支持脉冲轴和EtherCAT轴运动混合使用;
④开放的PT/PVT接口客户可自定义加减速算法的二次编程;
▶▶▶ 固件升级方法
固件升级有以下三种方式:
▶使用RTSys软件
▶使用ZDevelop软件
▶使用zfirmdown工具软件
RTSys和ZDevelop都是正运动推出的集成运动控制+机器视觉功能的开发软件,RTSys是ZDevelop的后续升级版本,两者功能强大,支持多种编程和开发需求,但在固件升级方面,两者并无显著差异,用户可根据正在使用的软件选择对应固件升级的方法。

若您并未用这两款软件编程,仅需要进行固件升级,那么zfirmdown工具软件将是您的不二选择,该软件专注于固件升级,操作简便,容易上手。
▶▶▶ 软件下载
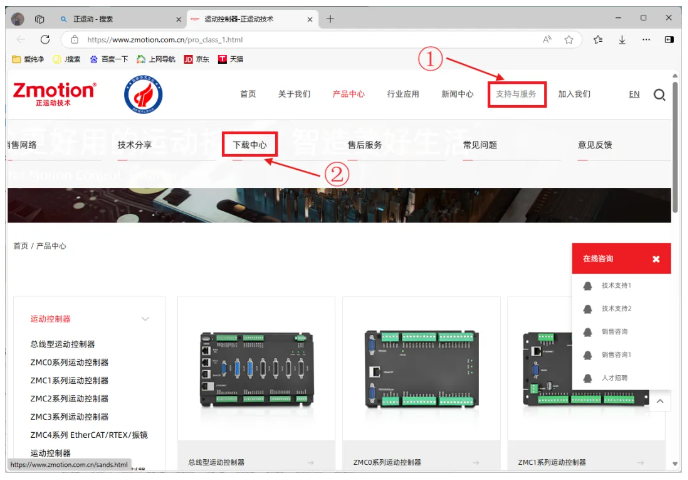
打开正运动技术有限公司官网(www.zmotion.com.cn)→支持与服务→下载中心→下载RTSys/ZDevelop/zfirmdown软件。
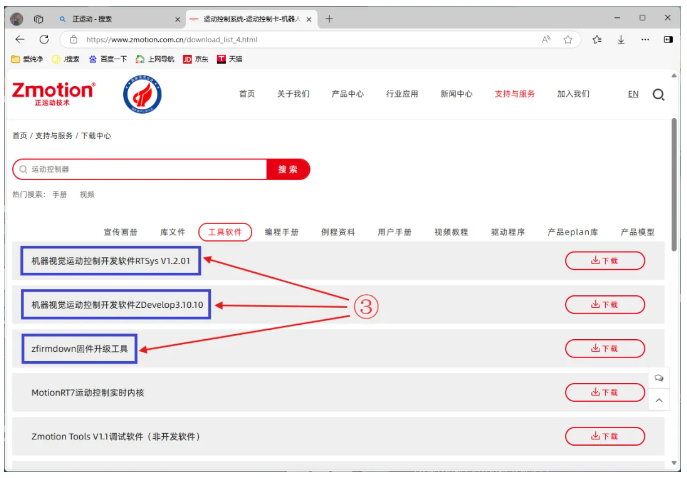
.zfm文件为控制器固件升级包,根据控制器硬件版本号选择对应的固件(不同型号的固件包不一样,确保选择正确的固件包,如需固件升级,请联系厂家)。下面以ZMC406R-V2控制器为例分别介绍三种方式进行固件升级的步骤。
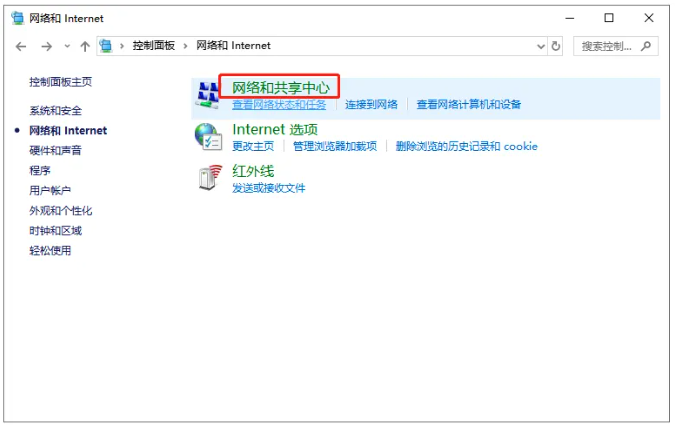
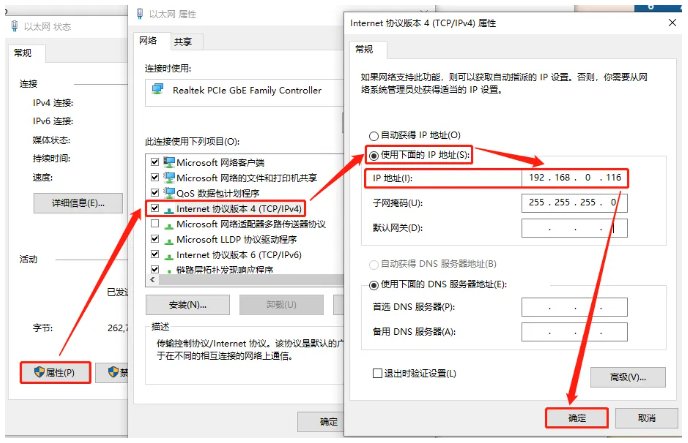
▶▶▶ IP修改
注:使用网口连接时,控制器与电脑IP必须在同一网段!以下为电脑IP修改图解:


▶▶▶ 使用RTSys软件升级固件
▶以RTSys V1.2.01版本软件为例。
1.给控制器接上电源线,使用串口/网口将控制器与上位机进行物理连接后上电。
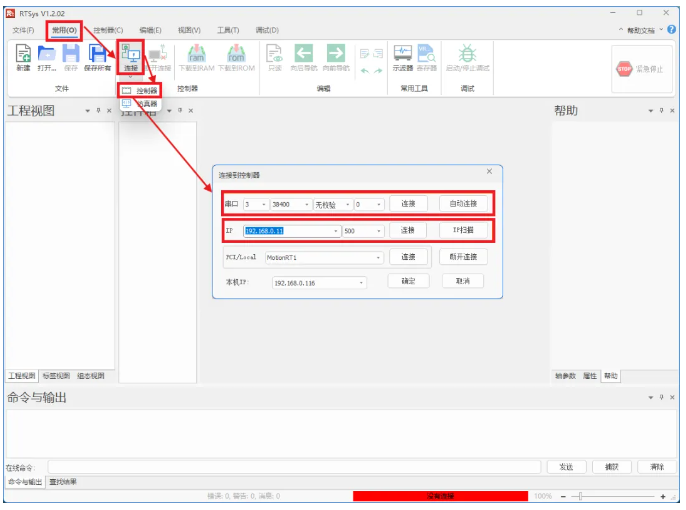
2.打开RTSys软件,连接控制器。“常用/控制器”→“连接”→“控制器”,选择串口/网口连接控制器。
控制器串口默认通讯参数波特率38400,数据位8,停止位1,无校验。下图串口栏参数分别表示:串口编号,波特率,是否校验,串口ID(填0即可)。
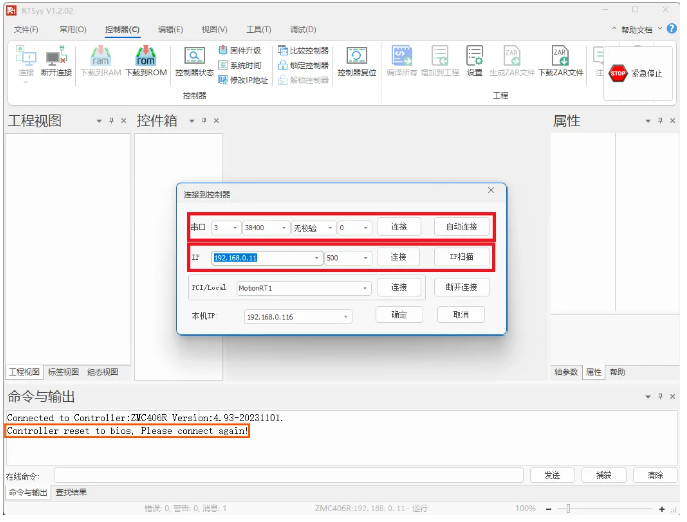
控制器默认初始化IP地址为192.168.0.11,下拉选择对应的控制器IP进行连接。
连接成功后,在“命令与输出”框可以看到如下语句,成功连接到ZMC406R-V2控制器,控制器当前软件版本为Version:4.93-20231101。
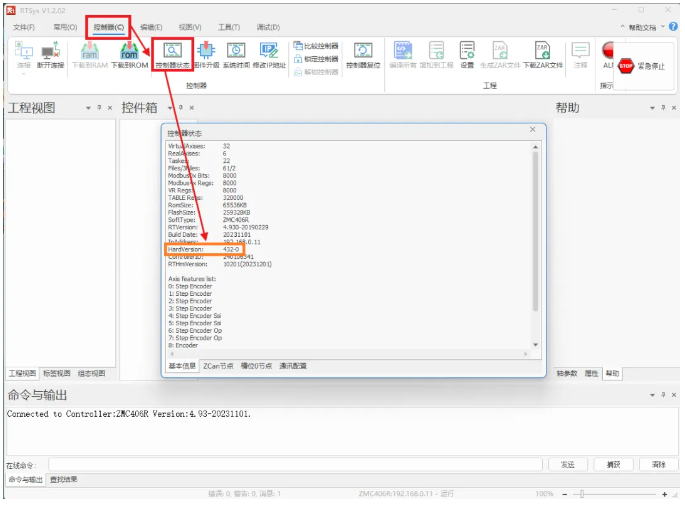
3.点击“控制器”→“控制器状态”,复制HardVersion(硬件版本,如下图,ZMC406R-V2的硬件版本为432-0),向相关技术人员获取该控制器最新固件文件并下载解压。
4.固件升级具体操作步骤可分为以下几点。
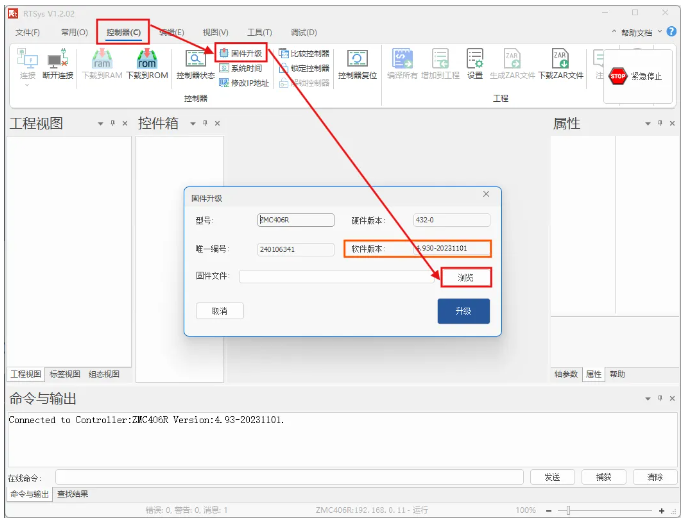
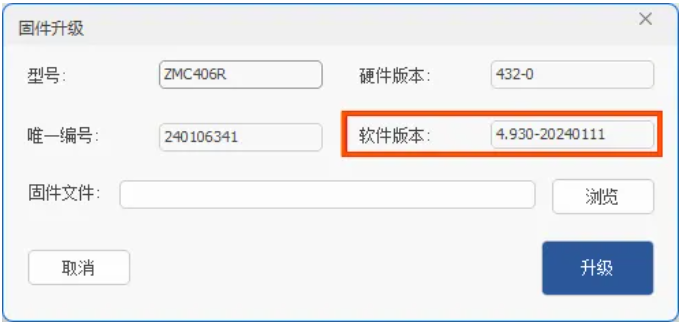
①点击“控制器” → “固件升级”,在固件升级界面也可以查看当前控制器软件版本为4,93-20231101,在“固件升级”界面 -“固件文件”栏点击“浏览”;
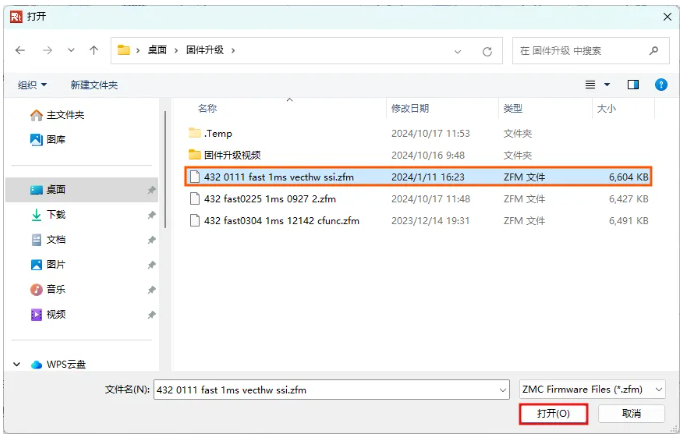
②选择刚刚解压的固件文件并打开;
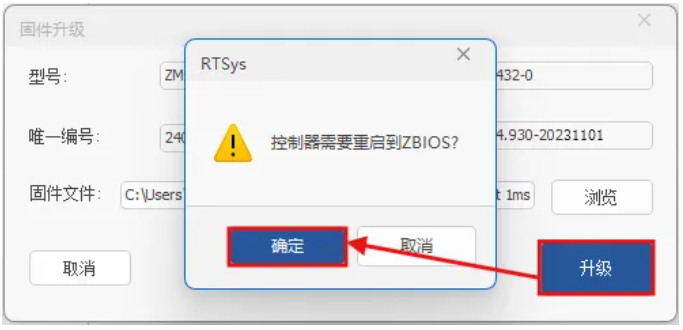
③点击“升级”,弹出“控制器需要重启到ZBI0S?”选项,点击“确定”;
④弹出“连接到控制器”界面,重复步骤“2”,重新连接控制器;
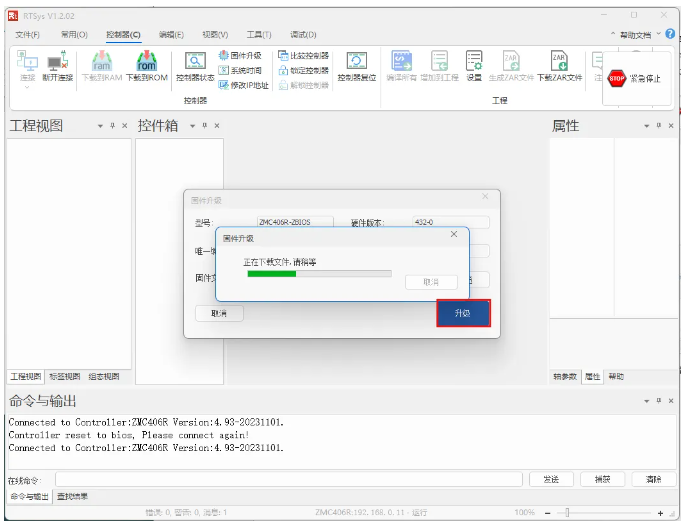
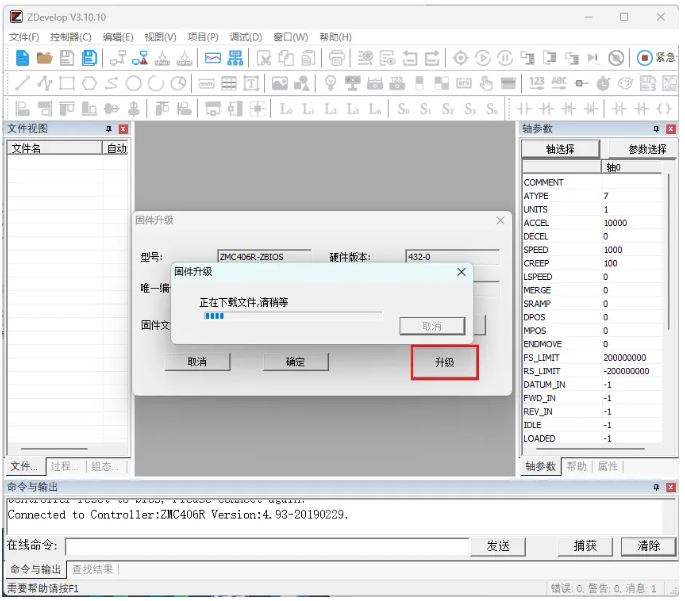
⑤连接成功后,在“固件升级”界面再次点击“升级”,弹出窗口显示“正在下载文件,请稍等”;
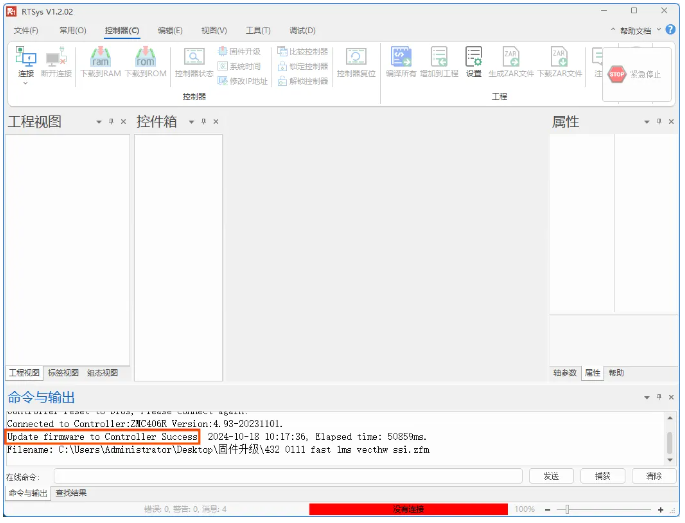
⑥下载完成后,“命令与输出”栏显示固件升级成功,且自动断开与控制器的连接;
5.重复步骤“2”,重新连接控制器,可以看到,“命令与输出”框以及“固件升级”界面均显示ZMC406R-V2的软件版本已经升级为4.93-20240111。

▶▶▶ 使用ZDevelop软件升级固件
▶以ZDevelop V3.10.10版本软件为例。
1.给控制器接上电源线,使用串口/网口将控制器与上位机进行物理连接后上电。
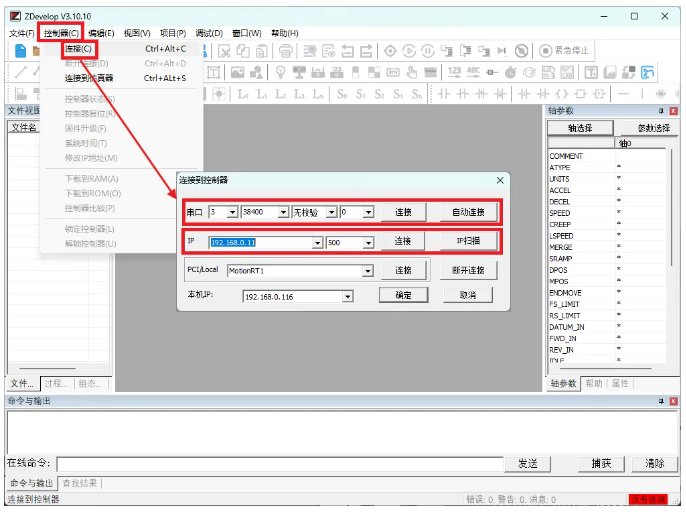
2.打开ZDevelop软件,连接控制器:“控制器”- “连接”,选择串口/网口连接控制器。
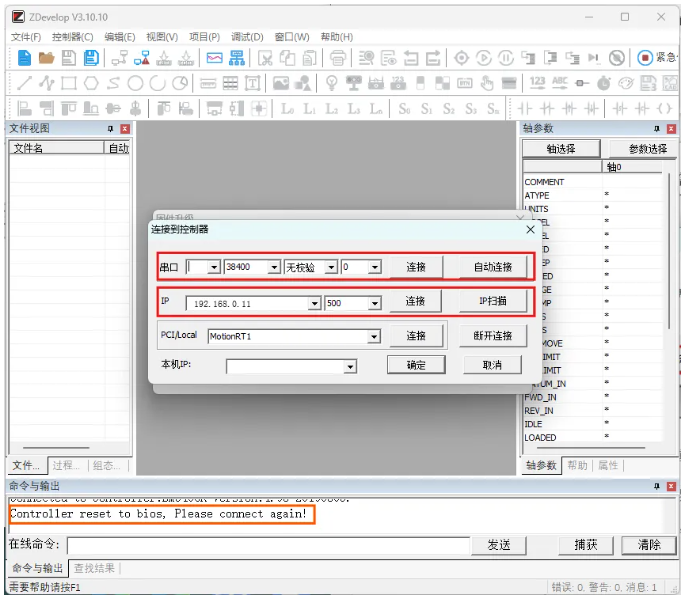
控制器串口默认通讯参数波特率38400,数据位8,停止位1,无校验。下图串口栏参数分别表示:串口编号,波特率,是否校验,串口ID(填0即可)。控制器默认初始化IP地址为192.168.0.11,下拉选择对应的控制器IP进行连接。
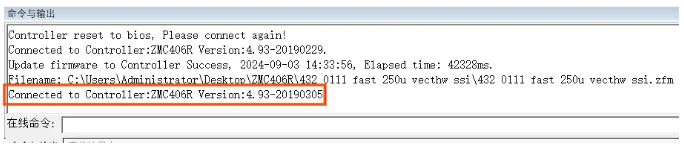
连接成功后,在“命令与输出”框可以看到如下语句,成功连接到ZMC406R-V2控制器,控制器当前软件版本为Version:4.93-20190229。

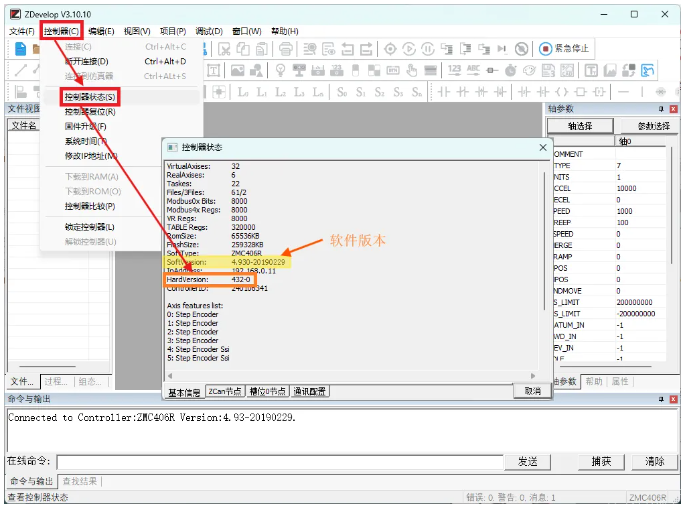
3.点击“控制器”→“控制器状态”,复制HardVersion(硬件版本,如下图,ZMC406R-V2的硬件版本为432-0),向相关技术人员获取该控制器最新固件文件并下载解压。
4.固件升级具体操作步骤可分为以下几点。
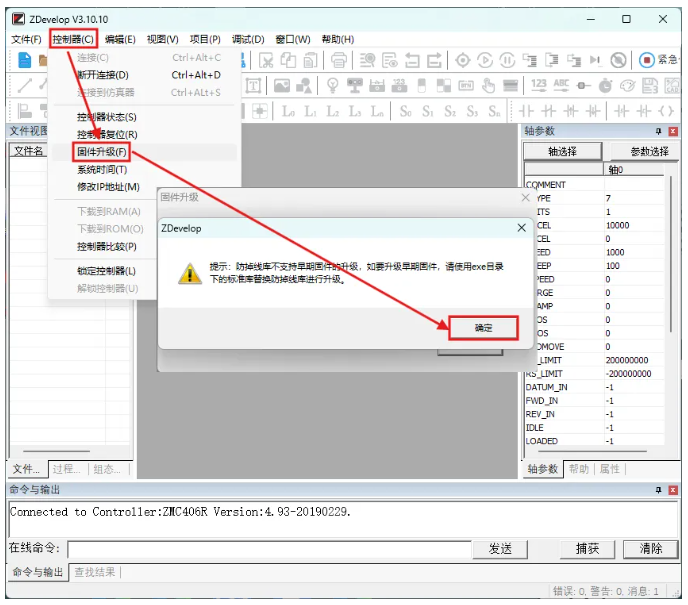
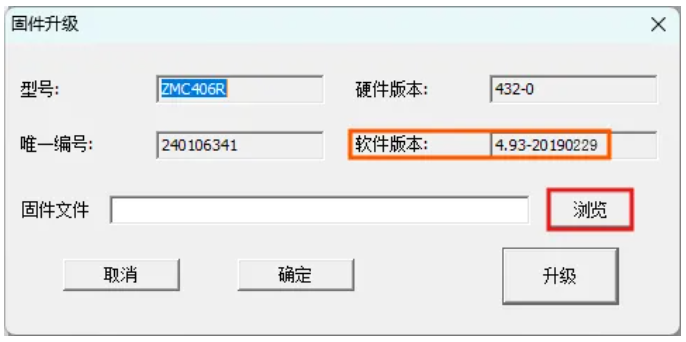
①点击“控制器”→“固件升级”,在弹出框中点击“确定”;
②在固件升级界面也可以查看当前控制器软件版本为4.93-20190229,在“固件文件”栏点击“浏览”;
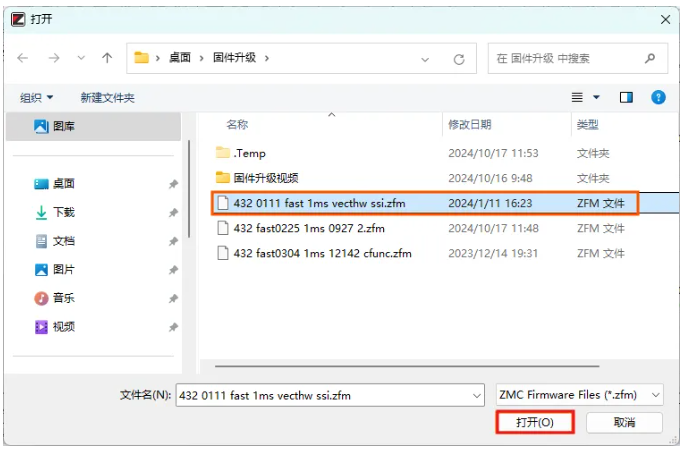
③选择刚刚解压的固件文件并打开;
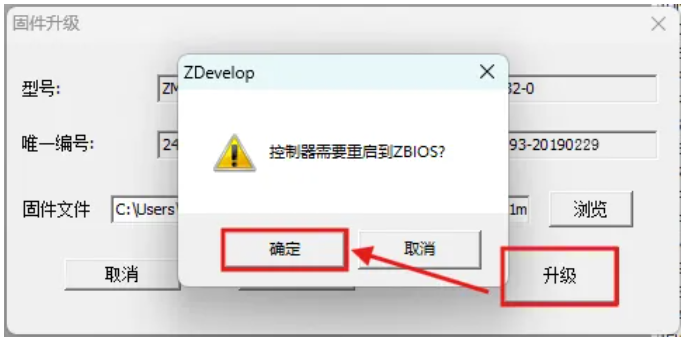
④点击“升级”,弹出“控制器需要重启到ZBIOS?”选项,点击“确定”;
⑤弹出“连接到控制器”界面,重复步骤“2”,重新连接控制器;
⑥连接成功后,在“固件升级”界面点击“升级”,弹出窗口显示“正在下载文件,请稍等”;
⑦下载完成后,“命令与输出”栏显示固件升级成功,且自动断开与控制器的连接。
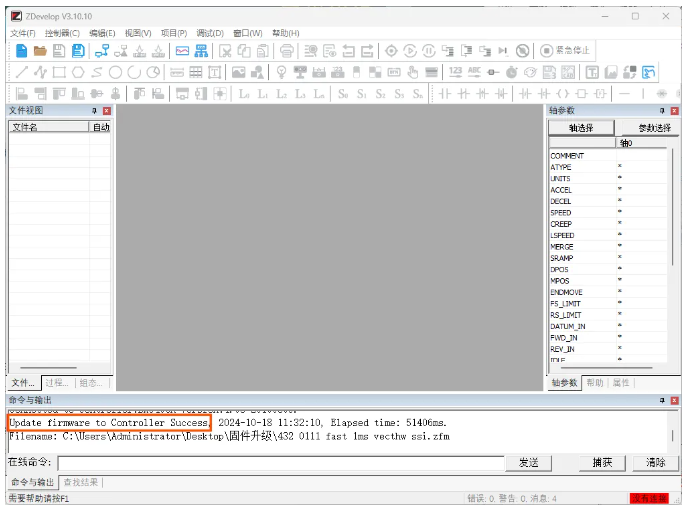
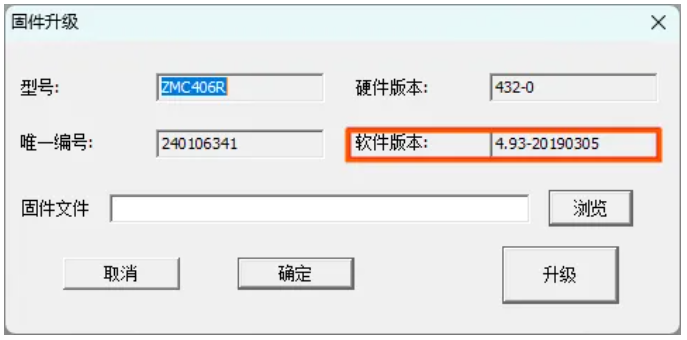
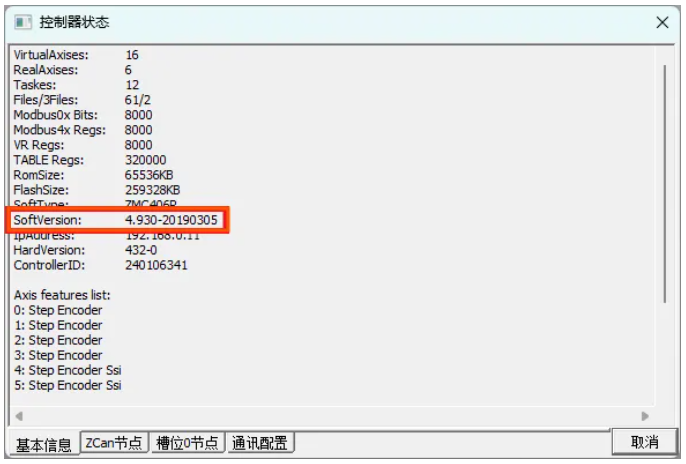
5.重复步骤“2”,重新连接控制器,可以看到,“命令与输出”框、“固件升级”界面以及“控制器状态”界面均显示ZMC406R-V2的软件版本已经升级为4.93-20190305。
▶▶▶ 使用zfirmdown工具软件升级固件
1.给控制器接上电源线,使用串口/网口将控制器与上位机进行物理连接后上电。
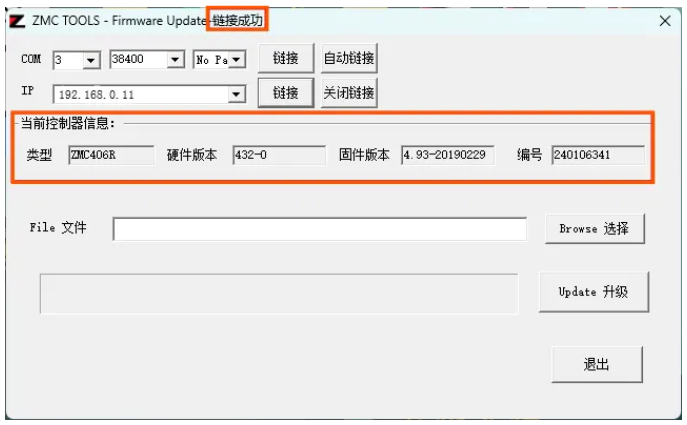
2.打开zfirmdown固件升级工具,选择串口/网口连接控制器(控制器串口默认通讯参数波特率38400,数据位8,停止位1,无校验。控制器默认初始化IP地址为192.168.0.11,下拉选择控制器IP进行连接)。
3.连接成功后,“当前控制器信息”栏将显示当前控制器类型、硬件版本、固件版本(4.93-20190229)以及其编号。复制硬件版本号,向相关技术人员获取该控制器最新固件文件并下载解压。

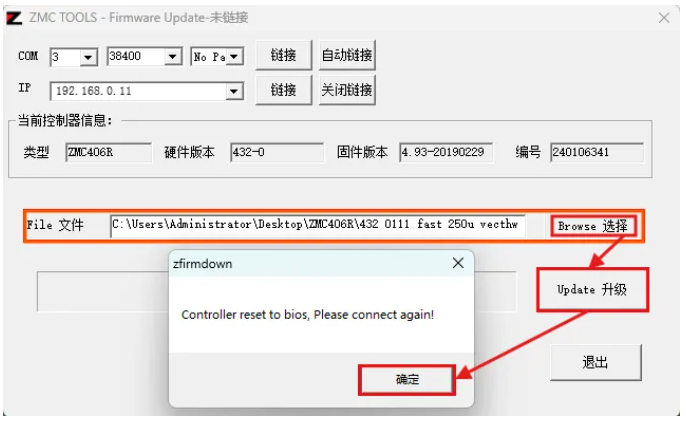
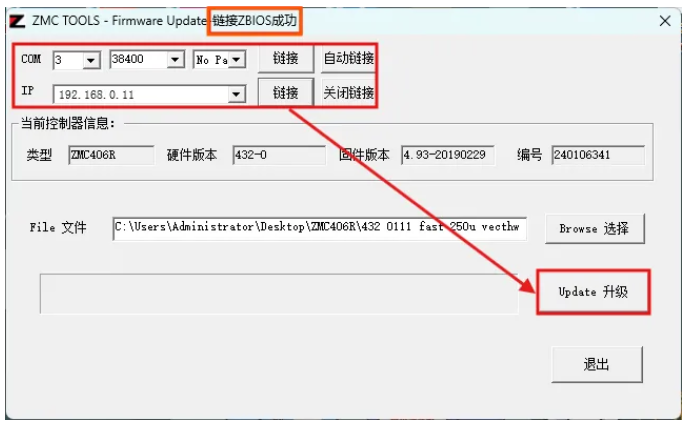
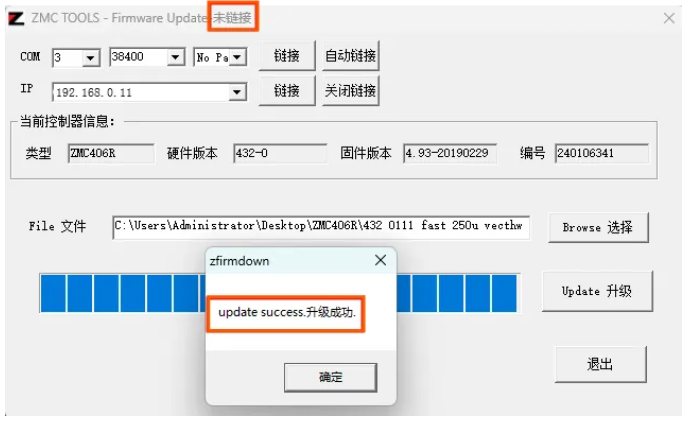
4.在“File文件”栏点击“Browse选择”,选择刚刚解压的固件文件打开;点击“Update升级”,弹出重新连接窗口,点击“确定”;重复步骤2,重新连接控制器,界面最上方显示“链接ZBIOS成功”;再次点击“Update升级”,进度条不断前进,固件正在升级中。
5.进度条满后,弹出升级成功界面,此时控制器与上位机的连接自动断开。
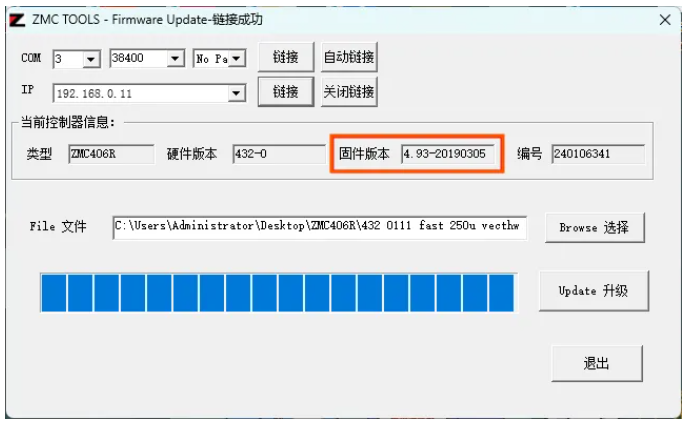
6.重复步骤“2”,重新连接控制器,可以看到当前 “控制器信息”栏 → “固件版本”已升级为4.93-20190305。
本次,正运动技术EtherCAT运动控制器的固件升级,就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
审核编辑 黄宇
-
运动控制器
+关注
关注
2文章
408浏览量
24795 -
机器视觉
+关注
关注
162文章
4405浏览量
120634 -
运动控制
+关注
关注
4文章
587浏览量
32953 -
正运动技术
+关注
关注
0文章
104浏览量
445
发布评论请先 登录
相关推荐





EtherCAT运动控制器与PLC的区别
什么是EtherCAT运动控制器?它有哪些特点?
EtherCAT运动控制器在LabVIEW中的运动控制与实时数据采集

EtherCAT运动控制器在ROS上的应用开发案例(上)







 工商网监
工商网监
评论