 挂轨巡检机器人组成部分有哪些?
挂轨巡检机器人组成部分有哪些?
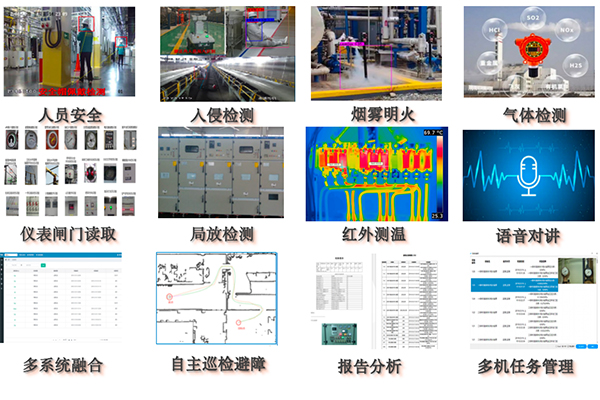
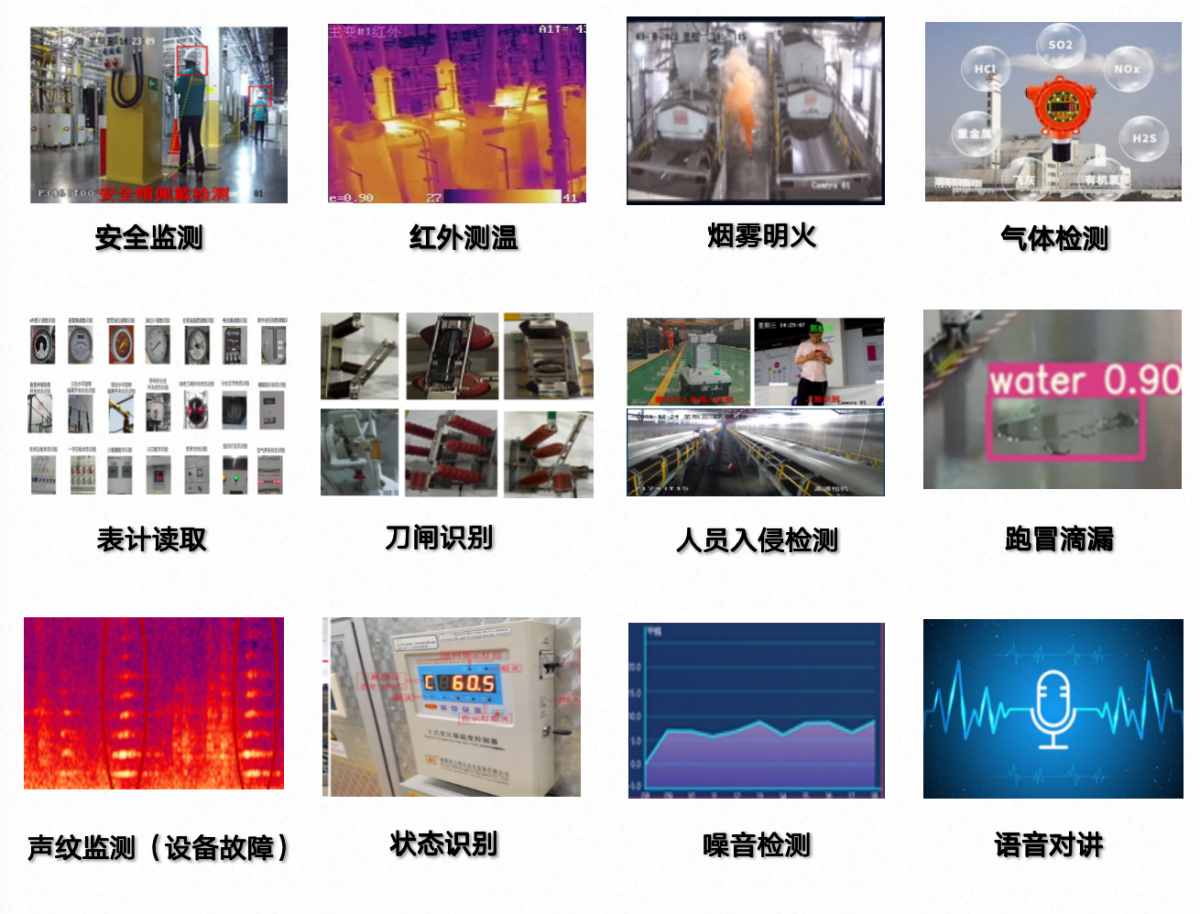
由于挂轨式巡检机器人,其外观小巧、功能强大、便于部署等优点,越来越多的被应用于如轨道交通、管廊、桥梁和隧道、矿山和矿区等狭窄通道以及其他各种复杂环境。机器人能及时发现潜在问题,有效降低漏检和误检的可能性,降低人工成本和安全风险。那么挂轨巡检机器人都是有哪些部分组成的呢?
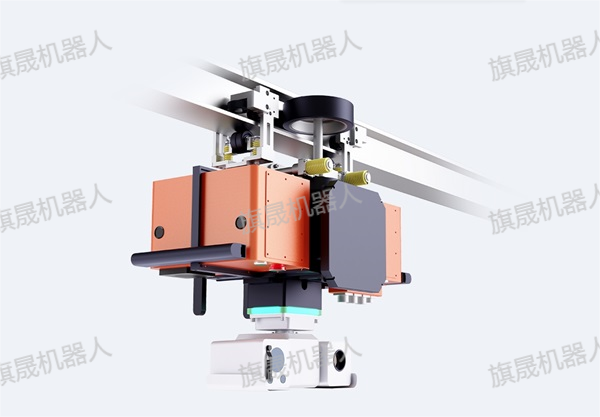
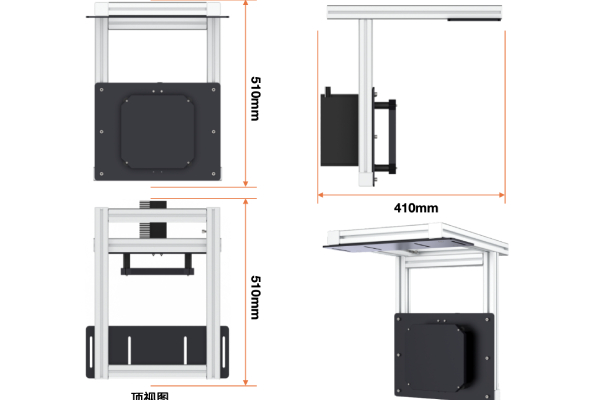
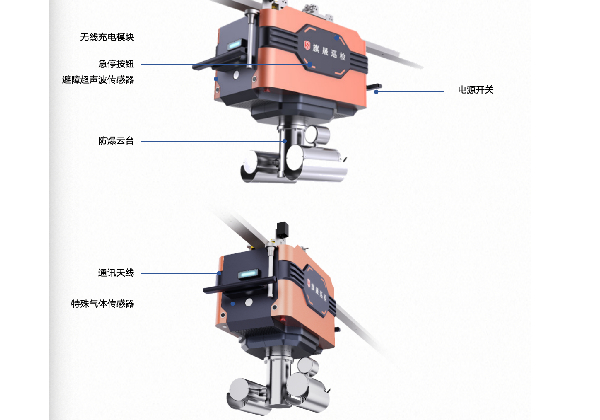
1、本体:主体结构通常由坚固的材料制成,以确保机器人在运行过程中的稳定性和可靠性。包括底盘、外壳等,还有无线充电模块、状态灯带、避障超声波装置。
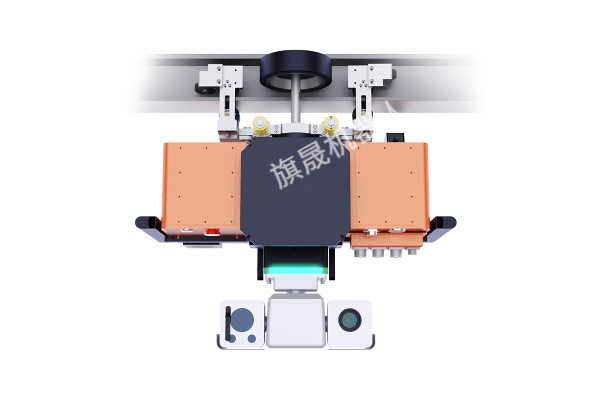
2、传感器安装位置:机身安装各种传感器,如温度传感器、湿度传感器、摄像头等。这些位置的设计需要考虑传感器的监测范围和精度要求。
3、图像采集系统:可能包含摄像头或其他图像传感器,用于拍摄和监测目标区域。
4、定位与导航系统:通过传感器和算法,实现精准定位和自主导航,确保机器人在轨道上安全高效地执行巡检任务。
5、充电桩:充电桩一般采用智能化设计,可以自动检测机器人的电量状态,并在需要时进行充电。同时,它还具备保护功能,可防止过充、过流等问题,保障充电安全。
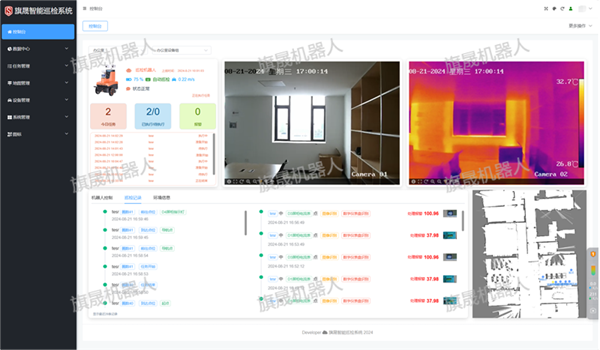
6、客户端:包括PC和app端,用于监控机器人的运行状态、接收实时数据、设置任务和参数,以及对机器人进行远程控制。
综上所述,挂轨巡检机器人由本体、传感器安装位置、图像采集系统、定位与导航系统、充电桩以及客户端等等组成。这些组件协同工作,使得机器人能够在各种复杂环境中高效稳定地运行,为相关领域的巡检工作提供了可靠的支持。随着技术的不断进步,挂轨巡检机器人的应用领域还将不断扩大,为人们的生产生活带来更多的便利和安全保障。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28745浏览量
208907
发布评论请先 登录
相关推荐
Ex2-C6防爆挂轨巡检机器人:化工安全巡检的得力助手
出错,管理难度大。而化工厂巡检机器人的出现,为解决这些问题带来了希望。让我们一同探索化工厂巡检机器人如何为化工企业安全生产保驾护航。 一、化工巡检

旗晟轨道巡检机器人:复杂环境中的安全卫士
不知疲倦的守护者,时刻警惕着潜在的风险与隐患。那么今天我们来看看旗晟机器人的轨道巡检机器人吧。 一、Ex2防爆挂轨

挂轨巡检机器人在发电厂与煤矿皮带机场景的应用
科技有限公司推出的B3-111-A挂轨巡检机器人,以其高效、精准、安全的特性,为发电厂和煤矿的皮带机巡检带来了革命性的变革。 二、B3-11

B3-111-A 小型挂轨式巡检机器人:精准巡检,高效运维
在现代工业自动化与智能化的浪潮中,巡检机器人的应用日益广泛,为各类复杂环境下的设备巡检与运维提供了强有力的支持。杭州旗晟智能科技有限公司推出的B3-111-A小型挂

B2 双电机系列挂轨巡检机器人:创新科技,守护工业安全
随着工业自动化的不断发展,传统的人工巡检方式已经难以满足现代工业对安全、效率和精度的要求。旗晟机器人推出的B2双电机系列挂轨巡检
综合管廊挂轨巡检机器人:安全高效管理的新力量
的监控需求。为了解决这些问题,轨道智能机器人的应用成为了一种新的革命性的解决方案。 一、综合管廊 挂轨巡检机器人 综合管廊
配电房挂轨巡检机器人
配电房作为电网中的重要组成部分。其运行的的安全和稳定性直接影响到电力供应的质量。然而,传统的人工巡检模式存在诸多弊端,例如巡检效率低下、人员安全难以保障、巡检结果主观性强等问题。为了解
巡检机器人的分类和种类有哪些
在科技日新月异的今天,巡检机器人已经成为自动化巡检领域的得力助手,它们凭借着高效、精准和全天候的工作能力,逐渐在各个领域崭露头角。从轨道巡检到轮式巡逻,从防爆检测到管道巡查,

化工厂挂轨式巡检机器人:全方位保障生产安全与效率
工作量急剧增加,给人工巡检带来诸多不便,关系到人身安全。 二、机器人解决方案 作为现场巡检的核心组成,整个巡检系统由
巡检机器人有哪些功能和作用
在科技如此发达的时代,巡检机器人犹如一位不知疲倦的守护者,悄然走进了我们的生活。它们具备着令人惊叹的功能和作用,成为了保障安全、提高效率的重要力量。那么,巡检机器人功能和作用?下面我们
钢铁厂巡检机器人的应用场景有哪些?
上。它具备着精准感知、高效巡检、实时监测等一系列强大功能,为钢铁厂的安全与稳定保驾护航,开启了钢铁工业智能化巡检的新时代。 Ex2系列防爆挂轨巡检
园区巡检机器人:释放园区管理新活力
在当今城市化快速发展的背景下,园区管理成为了城市管理的重要组成部分。然而,随着园区规模的不断扩大和管理需求的日益增加,传统的园区巡检方式已经无法满足对园区安全、环境监测和设施维护的需求。人工巡检

巡检机器人有哪些功能和作用?
在当今的科技时代,各行各业都在不断寻求创新和高效的解决方案。在这个背景下,巡检机器人应运而生,成为了众多领域的新兴力量。那么,巡检机器人有哪





 工商网监
工商网监
评论