 GNSS仿真中的HiL延迟:挑战、影响与解决方案深度剖析
GNSS仿真中的HiL延迟:挑战、影响与解决方案深度剖析
作者介绍
一、GNSS仿真与Hil延迟
自动驾驶技术的快速发展为现代交通系统带来了巨大的变革,而全球导航卫星系统(GNSS)在其中扮演着关键的角色。GNSS不仅为自动驾驶车辆提供准确的定位信息,还为导航、速度计算和时间同步等关键功能提供支持。然而,在将自动驾驶系统投入实际道路之前,进行全面的仿真测试是至关重要的。
GNSS仿真测试在自动驾驶技术开发中占据着重要地位。通过模拟不同环境下的卫星信号,可以评估车辆在各种条件下的导航性能。这种测试有助于验证系统对定位误差、信号遮挡和多路径效应的鲁棒性,提高自动驾驶系统在现实世界中的可靠性和安全性。
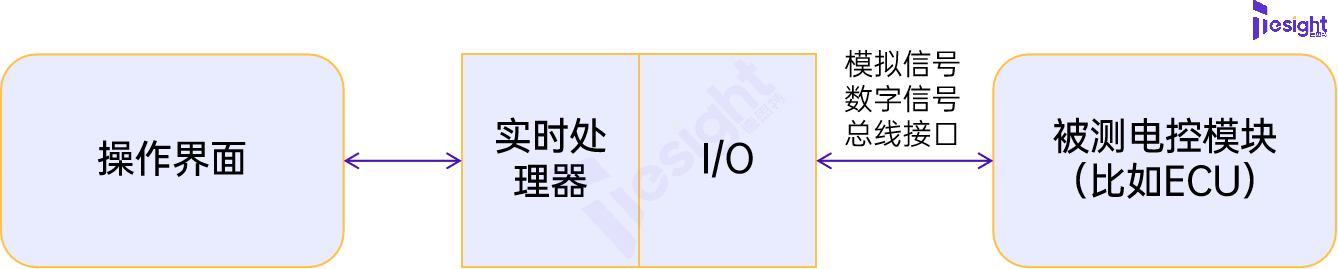
在仿真测试的多个层面中,硬件在环(Hardware-in-the-Loop,HiL)测试方法更是一项关键的技术。HiL测试通过在实际硬件系统(如传感器、控制单元等)与仿真环境之间建立实时连接,实现了对整个自动驾驶系统的高度真实性测试。这种方法不仅可以验证GNSS接收器的性能,还可以考察其与其他传感器和控制单元的集成效果。
综合而言,GNSS仿真测试及其在HiL测试中的应用,为自动驾驶技术的研发提供了强大的工具。通过这些测试方法,开发人员能够更全面、更深入地了解自动驾驶系统在不同情境下的表现,从而不断优化其性能,推动智能交通的发展。
然而HiL的发展也带来了挑战,在硬件在环(HiL)测试中,延迟问题是一个至关重要的方面。延迟是指在信号从传感器到控制单元再到执行器的传输过程中所经历的时间延迟。在自动驾驶系统中,尤其是涉及全球导航卫星系统(GNSS)的情境下,延迟问题可能导致严重的性能影响,甚至危及系统的安全性。
二、HiL仿真中GNSS信号延迟的影响
首先,GNSS信号的延迟可能对车辆的实时定位产生显著影响。如果系统无法及时处理来自卫星的定位信息,车辆可能在导航中产生误差,导致不准确的位置和轨迹预测。这对于自动驾驶车辆而言是不可接受的,因为它们需要快速、准确地做出决策以确保行驶安全。
其次,延迟问题也可能影响到系统的实时响应性。在自动驾驶中,及时的传感器信息和控制命令对于避免碰撞、调整车速等关键操作至关重要。如果存在较大的延迟,系统可能无法在紧急情况下迅速做出反应,增加了事故的风险。
解决HiL测试中的延迟问题需要精心的设计和优化。通过使用高性能的实时计算平台、优化传感器和控制单元之间的通信协议,以及采用先进的同步技术,可以最小化信号传输的延迟。定期的延迟分析和调试也是确保系统性能的关键步骤,以便及时发现和解决潜在的延迟问题。
三、HiL延迟是否会影响测试?
这取决于测试项目与内容。大多数针对接收机/芯片的GNSS性能与指标测试不需要实时远程运动。在使用预定义运动和轨迹就能足够。这个时候,无论你的设备是否有延迟,延迟有多高,起始并不影响测试项目。
而如果,你需要进行的是闭环测试,需要测试后端的反馈或人类控制,此时延迟就是特别需要控制的内容,延迟越大,测试的不确定性就越大。随着动态性的增加,较高的延迟而插入到测试中的潜在错误将会呈指数级增加。
四、HiL延迟分析
1.开环HiL
开环硬件在环(Open-Loop Hardware-in-the-Loop,开环HiL)是一种在测试和验证系统时使用的HiL测试方法。在开环HiL中,测试系统被置于仿真环境中,但与系统的实际控制器断开,控制器的输出信号由仿真环境生成,而不是来自实际系统。
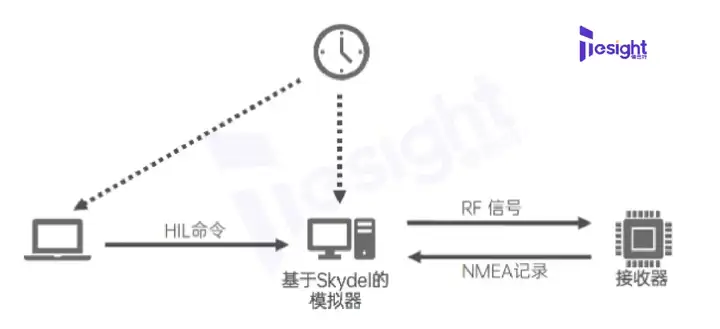
GNSS模拟器仿真内容是根据前端的HiL文件或控制端生成的,但无需接受远端系统的实时反馈。这些反馈将在模拟迭代之前就已经预定义,本质上是数据进行单项流动。在这种情况下,系统进行时间戳标记与缓存即可实现零延迟。
以GNSS模拟器为例,其迭代率为1000Hz,即每秒产生1000次数据,间隔为1ms。当网络与线路延迟为5ms时,GNSS模拟器可以提前五秒接收数据并处理(相对于时间戳),即可完成零延迟输出。

2.闭环仿真
闭环硬件在环(Closed-Loop Hardware-in-the-Loop,闭环HiL)是一种高级的HiL测试方法,其中系统的实际控制器与仿真环境相连,形成一个封闭的控制回路。在闭环HiL中,系统的输出由实际控制器产生,并传递给仿真环境,仿真环境再模拟实际系统的响应,形成一个真实的控制环境。
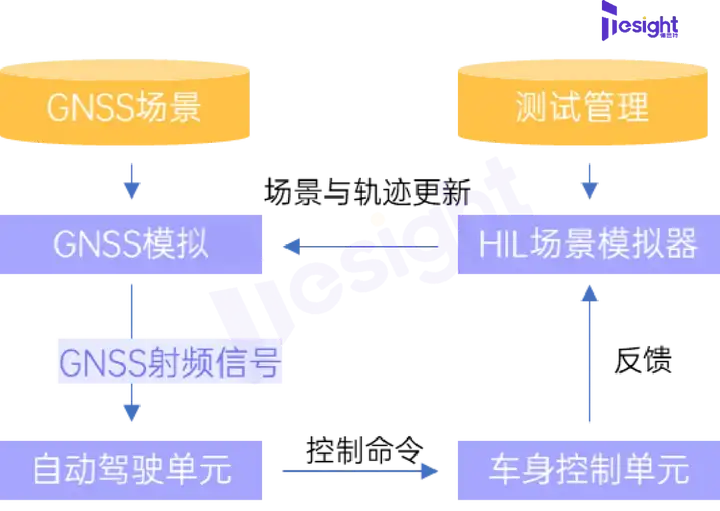
闭环测试一般需要考虑DUT的反馈信息,GNSS接收到的信息是根据反馈实时生成的未知信息,因此,闭环中就会存在延迟。
但对于闭环测试来讲,过大的延迟将会导致结果失真。最典型的例子是飞行员/驾驶员参与的模拟测试。飞行员/驾驶员需要根据看到的画面与车辆转态(待测件)做出指令,比如转向、刹车等。此时如果延迟过大将会影响后续的命令生成与信号产生,将会导致仿真失真与不连续。
 VOLVO DiL测试中的驾驶员舱室
VOLVO DiL测试中的驾驶员舱室
闭环HiL无法像开环HiL一样提前接收到数据做预测,因此延迟是必然存在的,GNSS模拟器延迟产生主要由以下几部分构成:
● 从上游节点或设备发送最新消息的时间
● GNSS接收和处理消息的时间
● 在GNSS模拟器中生成、转换的时间
● 射频信号输出所用的时间
我们对这个延迟时间做分析:
1)从上游节点或设备发送最新消息的时间
我们将其称之为网络延迟或传输延迟,是指上游节点生成消息到达GNSS模拟器的时间,这一延迟受网络和传输环境影响,一般为1-2ms。
2)GNSS接收和处理消息的时间
我们将其称之为采样延迟,指GNSS收到消息到被系统捕获所用的时间。这一时间取决于双边的采样率,采样率越高,每秒钟回传到系统的数据越密集。以GNSS模拟器为例,其迭代率为1000Hz,即间隔为1ms。
若上游节点迭代率也是1000Hz且时间完全同步,假设数据是在这一次传输后刚结束到来的,那么最差的情况则是其在下一次采样被捕获,用时<1ms。
若上游节点迭代率是100Hz且时间完全同步,那么数据需要10ms生成一组,假设数据是在这一次传输后刚结束到来的,那么最差的情况则是其在第十次采样被捕获,用时<10ms。
反之,若上游节点迭代率是1000Hz,而GNSS模拟器迭代率只有100Hz(市场上大多数情况如此),数据每1ms生成一组,假设数据是在这一次传输后刚结束到来的,那么最差的情况则是未来的十组数据均无法被GNSS模拟器捕获到,第十一组数据才会被捕获到,此时中间损失十组数据,用时将大于9ms,小于10ms。
3)在GNSS模拟器中生成、转换的时间
我们称之为更新延迟,指GNSS捕获到数据转换为IQ数据的时间。这一事件取决于GNSS模拟器的算力与GPU性能。这一延迟会跟随仿真过程有实时变化,一般很难准确观测。
4)射频信号输出所用的时间
我们称之为输出延迟或推流延迟,指IQ数据转化为RF信号所用的时间,这一事件取决于GNSS模拟器的SDR性能。这一延迟会跟随仿真过程有实时变化,一般很难准确观测。
五、HiL仿真与延迟观测
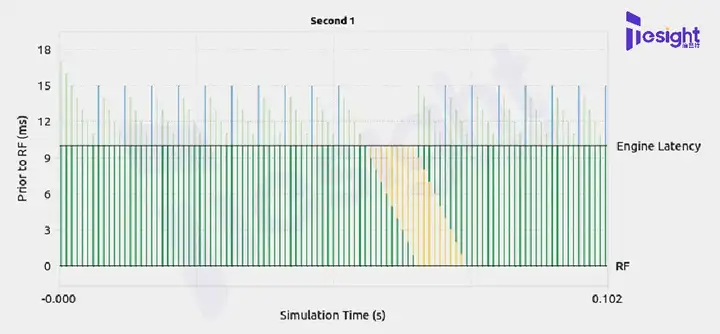
正如刚才所说,延迟是很难观测的,为了尽可能解决这一问题,GNSS模拟器依托软件定义架构提出了HiL可视化功能,实现了对HiL仿真过程中延迟与性能的可视化观测。
性能界面可以观测到详细HiL延迟状态。
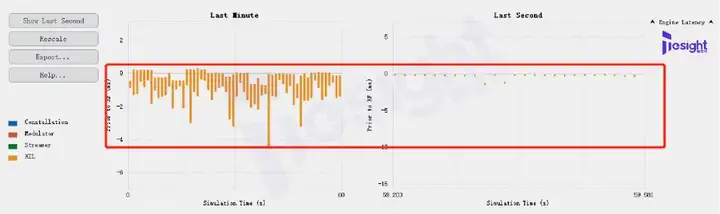
HiL图界面在观测HiL实现过程中进行旨在进行精确的诊断,并使您确信解决方案正按您的预期运行。
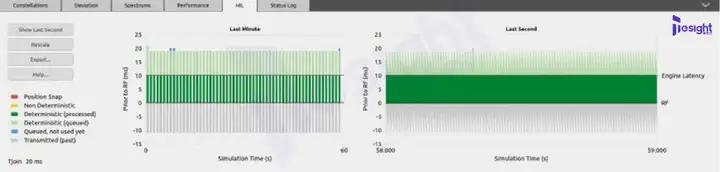
通过对HiL图的直观分析,可以观察到不同状态与信息:
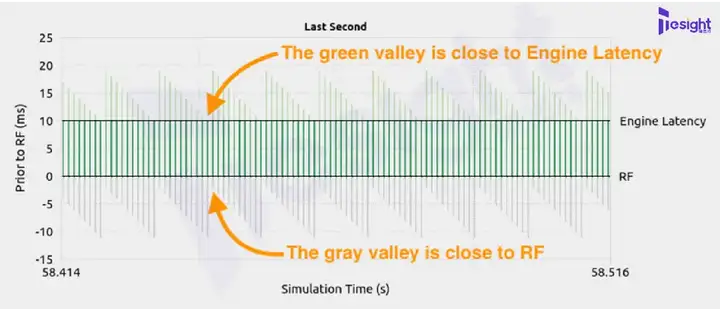
● 绿色谷底达到了引擎延迟并保持为绿色;没有蓝色、黄色或红色。这意味着HiL轨迹样本恰好按时接收,既不会太早也不会太晚。
● 灰色谷底靠近RF。这意味着Tjoin值和HiL轨迹采样率匹配良好。
● 所有峰值和谷底非常相似。这意味着样本按固定间隔接收,波动很小。
在出现HiL波动、滞后、丢失等情况时均有不同的显示:
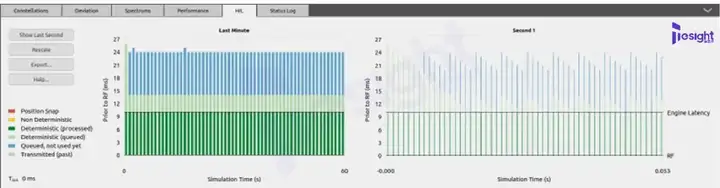 时间漂移
时间漂移
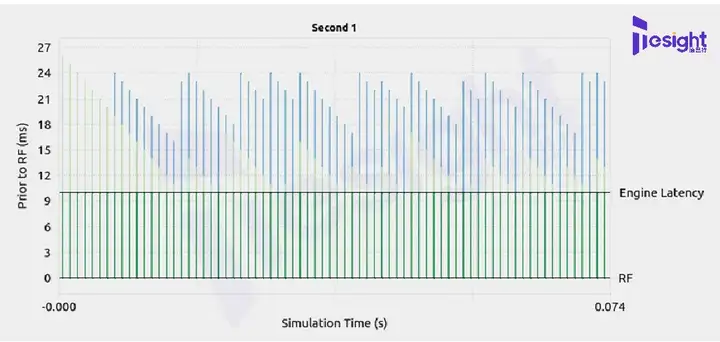 抖动
抖动
 样本丢失
样本丢失
审核编辑 黄宇
-
仿真
+关注
关注
50文章
4155浏览量
134478 -
HIL
+关注
关注
2文章
61浏览量
17756 -
GNSS
+关注
关注
9文章
808浏览量
48382
发布评论请先 登录
相关推荐
电力电子半实物仿真(HIL)原理及应用

底盘电控系统HIL仿真测试解决方案

智能驾驶HIL仿真测试解决方案

汽车HiL测试:利用TS-GNSS模拟器掌握硬件性能的仿真艺术

设计仿真 基于VTD的AR-HUD仿真测试解决方案

【干货分享】硬件在环仿真(HiL)测试

教学验证篇丨PPEC+HIL BUCK仿真验证

教学验证篇丨PPEC+HIL DAB仿真验证
教学验证篇丨PPEC+HIL LLC拓扑仿真验证
PPEC+HIL LLC拓扑仿真验证
GNSS仿真测试之三种常用坐标系与转换






 工商网监
工商网监
评论