 深度学习模型的鲁棒性优化
深度学习模型的鲁棒性优化

深度学习模型的鲁棒性优化是一个复杂但至关重要的任务,它涉及多个方面的技术和策略。以下是一些关键的优化方法:
一、数据预处理与增强
- 数据清洗 :去除数据中的噪声和异常值,这是提高模型鲁棒性的基础步骤。异常值和噪声可能会误导模型的训练,导致模型在面对新数据时表现不佳。
- 数据标准化/归一化 :将数据转换到同一尺度上,有助于模型更好地学习数据的内在规律,从而提高模型的泛化能力和鲁棒性。
- 数据增强 :通过对原始数据进行变换(如旋转、缩放、翻转、添加噪声等),生成更多的训练样本。这不仅可以增加数据的多样性,还可以使模型学习到更加鲁棒的特征,从而提高模型对输入变化的适应能力。
二、正则化技术
正则化是一种在训练过程中引入额外约束的技术,旨在减少模型的复杂度并防止过拟合。常用的正则化方法包括:
- L1正则化 :通过向损失函数中添加权重的绝对值之和作为惩罚项,来稀疏化模型的权重,从而提高模型的鲁棒性。
- L2正则化 :通过向损失函数中添加权重的平方和作为惩罚项,来限制模型权重的大小,防止模型过于复杂而引发过拟合。
- Dropout :在训练过程中随机丢弃一部分神经元,以防止模型对特定特征的过度依赖,从而提高模型的泛化能力和鲁棒性。
三、对抗训练
对抗训练是一种通过引入对抗性样本来训练模型的方法。对抗性样本是指经过微小扰动后能够导致模型错误分类的输入数据。通过将这些对抗性样本加入到训练数据中,可以迫使模型学习到更加鲁棒的特征表示,从而提高其对抗样本的识别能力。对抗训练的具体步骤包括:
- 生成对抗性样本:通过对输入数据施加微小的扰动来生成对抗性样本。
- 训练模型:使用包含对抗性样本的训练数据来训练模型。
- 评估模型:在测试集上评估模型的性能,并根据需要调整训练策略。
四、模型集成
模型集成是指将多个模型的预测结果进行融合,以得到更加稳定和准确的预测结果。常用的模型集成方法包括投票、平均等。通过集成多个模型,可以减少单一模型的误差和不确定性,从而提高整体的鲁棒性。模型集成的具体步骤包括:
- 训练多个模型:使用不同的算法、参数或数据结构来训练多个模型。
- 融合预测结果:将多个模型的预测结果进行融合,得到最终的预测结果。
- 评估集成模型:在测试集上评估集成模型的性能,并根据需要调整集成策略。
五、选择合适的模型结构和参数
- 选择合适的模型结构 :根据具体任务和数据特点选择合适的模型结构,避免使用过于复杂或过于简单的模型。过于复杂的模型可能会引发过拟合,而过于简单的模型可能无法充分捕捉数据的内在规律。
- 合理设置训练参数 :包括学习率、批大小、训练轮次等,确保模型能够在训练过程中充分学习并避免过拟合。
六、持续监控与更新
- 持续监控模型性能 :在模型上线后,持续监控其在实际应用中的性能表现,及时发现并修复潜在的问题。
- 定期更新模型 :随着数据的积累和技术的发展,定期更新模型以适应新的数据分布和任务需求。
综上所述,深度学习模型的鲁棒性优化是一个多方面的任务,涉及数据预处理、正则化技术、对抗训练、模型集成以及选择合适的模型结构和参数等多个方面。通过综合运用这些方法和技术,可以有效地提高深度学习模型的鲁棒性和泛化能力。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
数据
+关注
关注
8文章
7361浏览量
95128 -
模型
+关注
关注
1文章
3861浏览量
52322 -
鲁棒性
+关注
关注
2文章
48浏览量
13196 -
深度学习
+关注
关注
73文章
5613浏览量
124723
发布评论请先 登录
相关推荐
热点推荐
微电网经济调度理论:成本最小化与效益最大化的优化模型
构建微电网经济调度优化模型,需先明确模型的核心构成要素,包括目标函数、约束条件与优化变量,三者相互关联、相互制约,共同决定了优化

机器学习和深度学习中需避免的 7 个常见错误与局限性
无论你是刚入门还是已经从事人工智能模型相关工作一段时间,机器学习和深度学习中都存在一些我们需要时刻关注并铭记的常见错误。如果对这些错误置之不理,日后可能会引发诸多麻烦!只要我们密切关注

穿孔机顶头检测仪 机器视觉深度学习
顶头状态。
检测顶头算法
引入人工智深度学习技术,通过Keras实现卷积神经网络(CNN),用Numpy实现采集数据的训练,得到符合现场需求的模型,进一步提升检测的准确性和现场的适应
发表于 12-22 14:33
瞻芯电子G2 650V SiC MOSFET的鲁棒性验证试验
瞻芯电子(IVCT)基于经典寿命模型,对大样本量的第二代(G2)650V SiC MOSFET 进行了鲁棒性验证试验(Robustness-Validation)。该试验严格遵循AEC
【团购】独家全套珍藏!龙哥LabVIEW视觉深度学习实战课(11大系列课程,共5000+分钟)
(第10系列)、YOLOv8-Tiny工业优化版(第9系列),满足产线端设备算力限制,模型推理速度提升300%。
LabVIEW生态整合
作为工业自动化领域主流开发环境,LabVIEW与深度学
发表于 12-04 09:28
【团购】独家全套珍藏!龙哥LabVIEW视觉深度学习实战课程(11大系列课程,共5000+分钟)
(第10系列)、YOLOv8-Tiny工业优化版(第9系列),满足产线端设备算力限制,模型推理速度提升300%。
LabVIEW生态整合
作为工业自动化领域主流开发环境,LabVIEW与深度学
发表于 12-03 13:50
激活函数ReLU的理解与总结
》。它通过学习负部分的斜率来改进。PReLUs改进模型拟合,额外计算成本几乎为零,且风险较小。此外,PReLUs用了一个鲁棒的初始化方法,特别考虑整流非线性。
另一个变体是Rando
发表于 10-31 06:16
构建CNN网络模型并优化的一般化建议
:Dropout层随机跳过神经网络模型中某些神经元之间的连接,通过随机制造缺陷进行训练提升整个神经网络的鲁棒性。
6)指定合理的学习率策
发表于 10-28 08:02
自动驾驶中Transformer大模型会取代深度学习吗?
[首发于智驾最前沿微信公众号]近年来,随着ChatGPT、Claude、文心一言等大语言模型在生成文本、对话交互等领域的惊艳表现,“Transformer架构是否正在取代传统深度学习”这一话题一直被

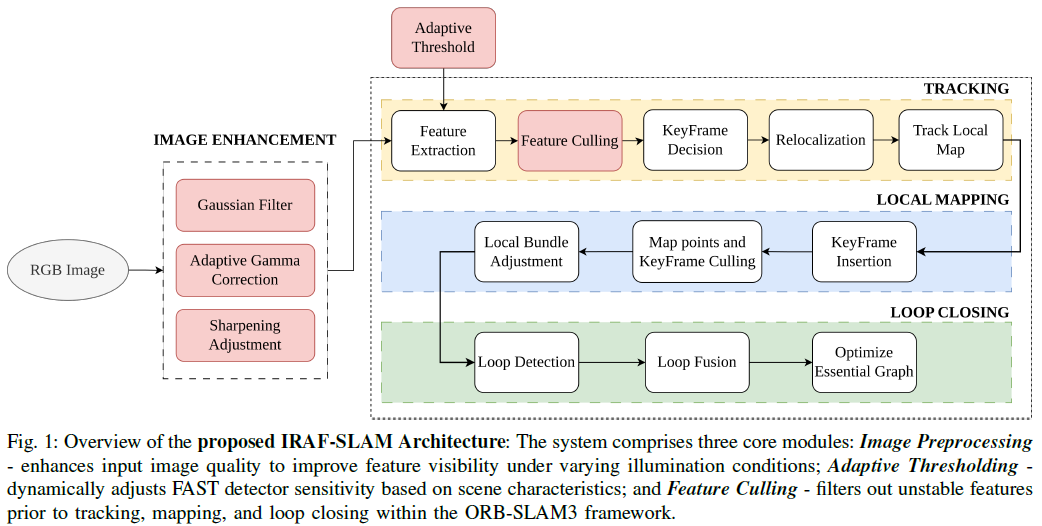
具备光照鲁棒和自适应特征剔除的VSLAM前端框架
现有的基于特征的VSLAM系统依赖于固定的前端参数,这使得它们在面对光照突变时显得十分脆弱,且特征跟踪也不稳定。为应对这些挑战,我们提出了“IRAF-SLAM”,这是一种具备光照鲁棒性且能自适应特征筛选的前端设计,旨在提升VSL
大模型推理显存和计算量估计方法研究
GPU、FPGA等硬件加速。通过分析硬件加速器的性能参数,可以估算模型在硬件加速下的计算量。
四、实验与分析
为了验证上述估计方法的有效性,我们选取了几个具有代表性的深度
发表于 07-03 19:43
大模型在半导体行业的应用可行性分析
有没有这样的半导体专用大模型,能缩短芯片设计时间,提高成功率,还能帮助新工程师更快上手。或者软硬件可以在设计和制造环节确实有实际应用。会不会存在AI缺陷检测。
能否应用在工艺优化和预测性维护中
发表于 06-24 15:10
FP5139BWR-LF异步升压控制器深度剖析:1.8V输入下的高效电池转换方案
可达92%以上,尤其适用于输入/输出压差大的场景。
动态功耗极致优化
1μA待机电流显著降低系统休眠功耗,逻辑电平控制模式切换便于MCU协同管理。
强鲁棒性保护机制
软启动 :通过外部
发表于 06-24 08:47
改进电压模型的异步电机无速度传感器矢量控制
控制系统,克服了一般电压模型低速观测不准确的缺点。另外,为了消除外界干扰的影响,对模型做了抗噪声处理。利用PSCAD进行系统仿真,仿真结果表明该方法具有较好的低速控制效果和较强的鲁棒
发表于 05-28 15:43



评论