 Bumblebee X 立体相机提升工业自动化中的立体深度感知
Bumblebee X 立体相机提升工业自动化中的立体深度感知
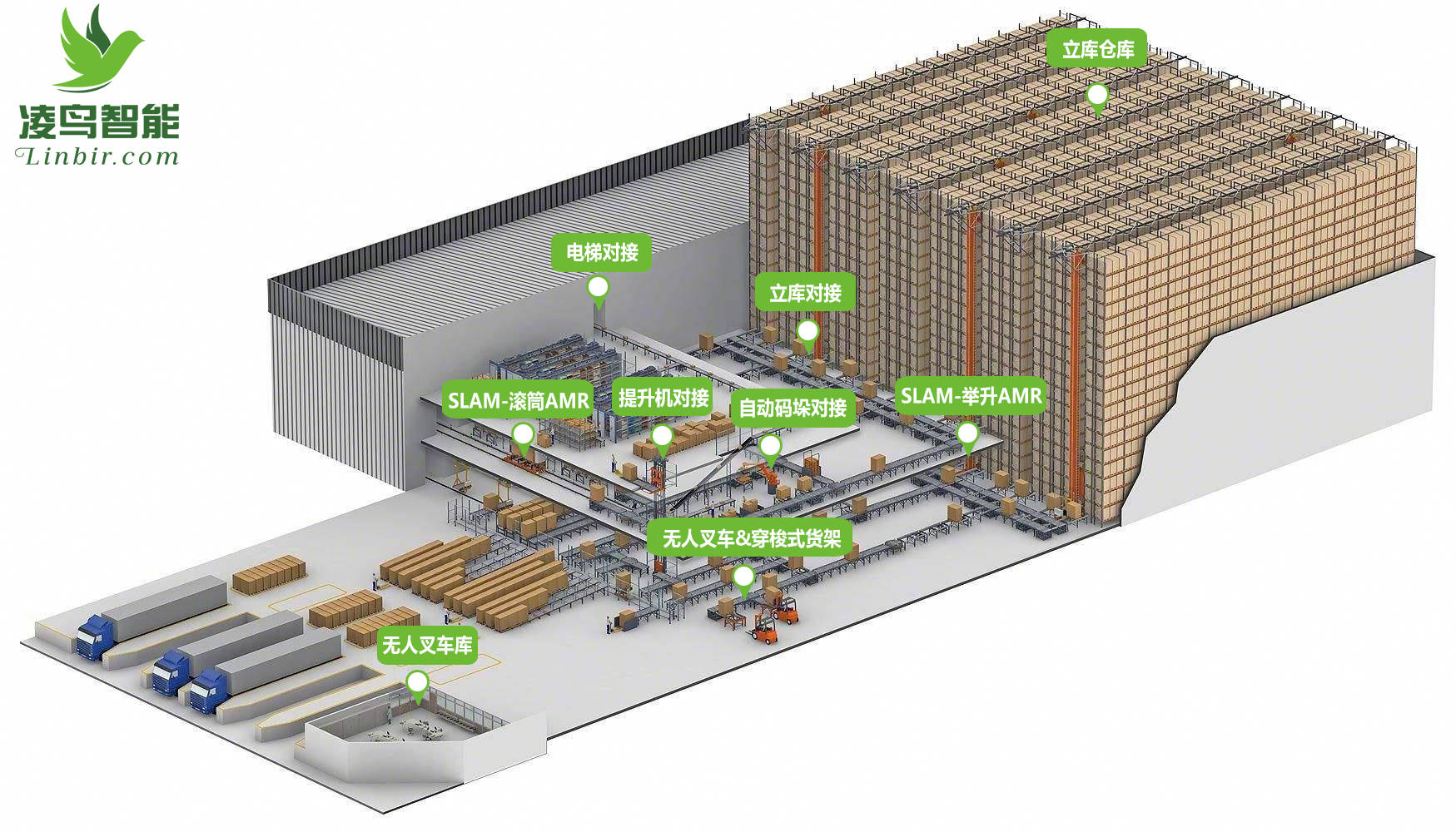
深度感知对仓库机器人应用至关重要,尤其是在自主导航、物品拾取与放置、库存管理等方面。
通过将深度感知与各种类型的3D数据(如体积数据、点云、纹理等)相结合,仓库机器人可以在错综复杂环境中实现自主导航,物品检测,灵活避开障碍物,精准拾取目标物品,将其准确无误地放置在特定位置,同时有效优化仓库空间布局,提升作业效率。
仓储应用
3D视觉技术
3D传感器是支持现实场景深度感知测量的基础技术。常见的3D视觉技术如立体相机、激光雷达、渡越时间相机和激光三角测量。
3D技术的选择取决于具体的应用和需求,每项技术都有其独特的优势。例如,激光雷达和激光三角测量技术,由于内置诸如旋转镜等运动部件,因此不适合在恶劣环境中使用。
立体相机不易受到阳光直射的干扰更适合户外应用场景。立体相机的成本通常低于其他3D传感器。立体相机在计算图像中的3D数据时,相较于上述其他技术,需要更高的计算能力。部分立体相机配备了板载处理能力,从而减轻主机的数据处理负担。
此外,在某些应用场景下,物体的识别依赖于彩色图像,而彩色点云则能提供更丰富的情境感知。相较于其他常见的3D视觉技术需要额外配备彩色相机,立体相机则能提供彩色图像与彩色点云。
这往往是在范围与精度之间做出的一种权衡考量。例如,远程传感器的精度相对较低,而短距离传感器则具有较高的精度。在测距能力方面,激光雷达具备最远的测距能力,其次是立体相机,最后是渡越时间传感器。激光三角测量的覆盖范围虽然最短,但其精度却更高。自主导航和障碍避让功能需要较长的探测范围,而物品拾取与放置操作只需中等范围的覆盖即可。近距离范围探测主要用于物体的识别与检查。
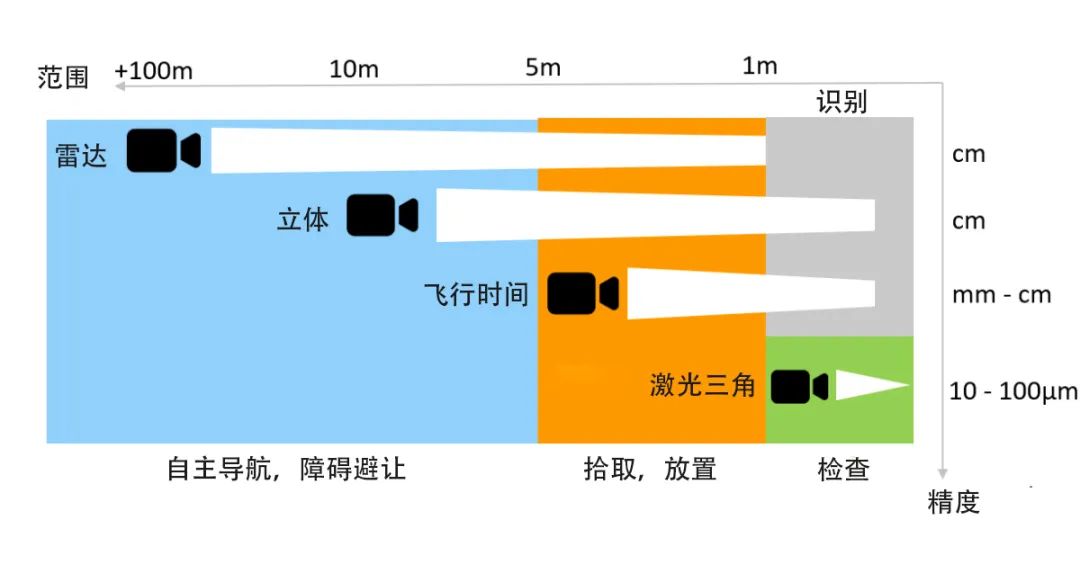 · 各种3D视觉技术范围和精度的平衡 ·
· 各种3D视觉技术范围和精度的平衡 ·
立体技术广泛适用于大多数仓库机器人的应用场景。它能提供灵活的覆盖范围和足够的精度性能。它拥有较低的成本优势,能够轻松适应恶劣环境条件,同时提供物体识别所需的彩色图像。
立体成像概述
立体成像技术模拟人类视觉中的3D感知原理。人类的双眼从两个不同视角观察同一场景,可以通过视差(即两个不同视角下物体位置的位移)推断出距离。
在立体成像系统投入使用前,必须进行一次性相机校准,在每一帧图像中,相机首先捕捉原始的左右图像,随后,在矫正步骤中,使用前期校准得到的信息。经过矫正的图像被传递至立体匹配步骤,生成视差图。最后,通过三角测量步骤将视差图转换为3D点云。
立体相机的关键设计驱动因素是3D精度。深度误差由以下公式得出:ΔZ d。它取决于以下因子:
“Z” = 范围
“B” = 基线,即两台相机之间的距离
“f”= 像素中的焦距,与相机视野及图像分辨率相关。
基于此公式,深度误差随范围的增加而呈二次方增长。这是立体相机在远距离操作中面临的一个主要局限性。为了减少误差,我们可以采取多种措施,例如延长基线长度、提高分辨率或缩小视野范围。
立体工业相机的应用
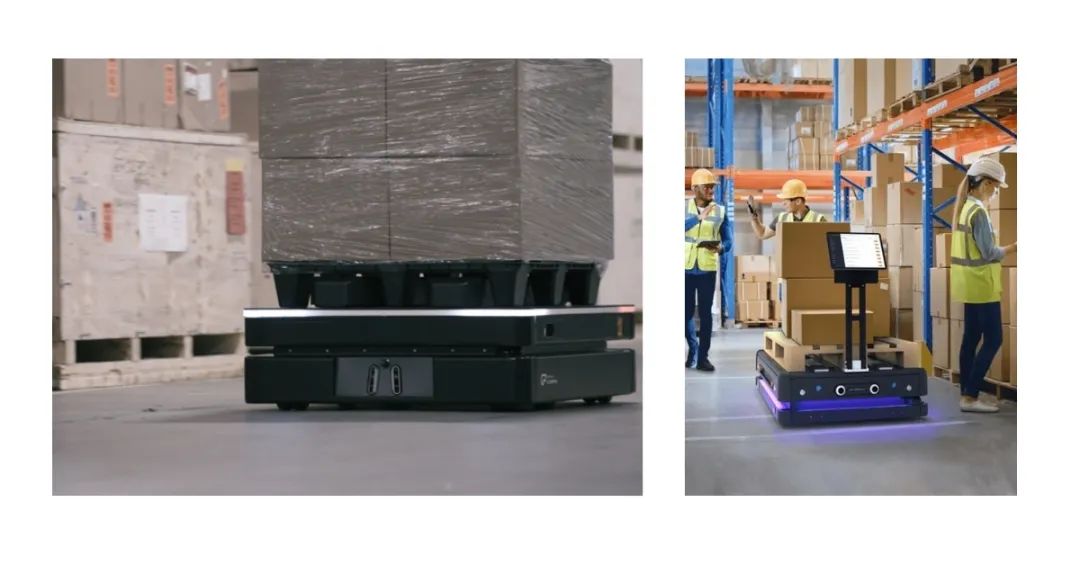
使用自主移动机器人(AMR)的仓库机器人技术
深度感知对仓库机器人应用至关重要,尤其是在自主导航、物品拾取与放置、库存管理等方面。
通过将深度感知与各种类型的3D数据(如体积数据、点云、纹理等)相结合,仓库机器人可以在错综复杂环境中实现自主导航,物品检测,灵活避开障碍物,精准拾取目标物品,将其准确无误地放置在特定位置,同时有效优化仓库空间布局,提升作业效率。
自主移动机器人(AMR)应用中标准立体相机的特征:
高帧率
低延迟
坚固可靠
校准保留
宽视野
远距离工作能力
适用于室内外的高动态范围
使用拾取与放置机器人的仓库机器人技术
立体相机仓库机器人另一个应用是拾取与放置作业,这类机器人能够精准地拾取零件或物品,并将其放置到其他位置。
该应用的关键组件包括一个用于感知周围环境的视觉系统、一个用于数据处理制定决策的控制系统,以及一个带有夹具或吸盘用于操控各种物体的机器人手臂。
相较于人工拾取与放置,这类机器人的优势主要体现在其更高的准确性和一致性上。它们具备出色的环境适应性,能够灵活应对各种变化,同时高效执行重复性任务,从而释放人力,使之投入到更为复杂的作业中,最终推动生产力和效率的双重提升。
拾取与放置机器人应用广泛,涵盖装配、托盘化、去托盘化和箱子拾取等多个领域。以箱子拾取为例,其目标是从容器中移除随机放置的物体。首先,视觉系统需要识别和定位物体,随后计算其方位,确保夹具能够正确拾取。然后,控制系统规划出机器人的移动路径,有效避开途中的障碍物。最后,机器人顺利拾起物体,并将其放置于指定位置。
自拾取与放置机器人应用中标准立体相机的特征:
低延迟
坚固可靠
校准保留
扬尘/潮湿的工业环境
针对不同大小的物体,需要在视野和工作距离上具备灵活性。
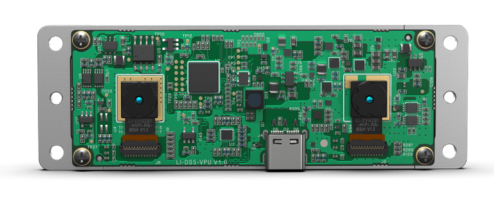
Bumblebee X 立体相机赋能工业自动化
新一代的Bumblebee X 立体相机,提供高分辨率、优异的精度和先进的板载处理能力。此外,其出色的工业设计、IP67 防护等级和5GigE 接口确保其能稳定集成在工业环境中。
Bumblebee X 的主要特点包括:
高分辨率与高精度
利用强大的立体算法的板载处理
24cm基线的远距离工作
灵活的视野选项(60、80 和 105 度)
具备IP67工业设计的高可靠性和坚固性
具备5G网口接口的高带宽和低延迟
长时间的校准保留
兼容外部图案投影仪
产品生命周期长
SDK功能丰富且易用
-
工业自动化
+关注
关注
17文章
2363浏览量
67208 -
3D视觉
+关注
关注
4文章
431浏览量
27515 -
立体相机
+关注
关注
0文章
6浏览量
3820
发布评论请先 登录
相关推荐
工业自动化的发展历程与未来趋势
CAN总线在工业自动化中的应用
边缘计算在工业自动化中的应用
立体视觉新手必看:英特尔® 实感™ D421深度相机模组
英德斯工控主板助力工业自动化升级
蓝牙模块在工业自动化中的应用
工业自动化和自动化区别是什么
工业自动化包含哪些技术
新品 | Bumblebee X系列用于高精度机器人应用的新型立体视觉产品

Teledyne FLIR IIS推出一款用于高精度机器人的新型立体视觉产品
AGV在立体仓库中的路径规划





 工商网监
工商网监
评论