 机器视觉运动控制一体机在智能磁驱输送线的应用
机器视觉运动控制一体机在智能磁驱输送线的应用
市场应用背景
传统输送带系统(如滚轮、皮带、链条、转盘等)通常是同步运行,在运动过程中容易产生震动、噪声、打滑等现象,无法保证输送过程当中的精度、速度和承载能力等,易导致设备损坏等问题,需定期对设备进行检查维护。
同时每个工位只能执行固定操作,整体处理时间受限于最长的工位。适用于产能较低或简单的制造流程,但在需要更高产能的复杂工艺中会出现周期长、灵活性不足等问题。
客户为缩减循环时间,通常会采取增设新的重复工位。尽管方案能在一定程度上减少循环时间,但会增加占地面积和运营成本,无法满足高速、高柔装配线的生产需求。
传统输送系统同步控制示意图
为满足市场对产品个性化和快速交付需求,制造企业需更新产线,实施柔性智造,降低成本,使单一产线能生产多种产品,并能根据生产节拍灵活调整动子,提升效率和产能。智能磁驱输送线正是为适应这一需求应运而生的智能输送线解决方案。
智能磁驱输送系统同步&异步控制示意图
智能磁驱输送线:
智能磁驱输送线以直线电机技术为核心,利用电磁力实现工件或载具的高速高精运输和定位,适用于频繁更改的生产线布局或产品类型,主要用于产品输送、产品间距调整、多工位协同作业、提升运输速度等传输和装配环节中。
在技术原理上,主要通过调节电磁线圈的电流,控制动子的加、减速和停止运动。动子本身为无源组件,没有复杂的内部结构,降低了维护成本,可移除不必要的重复工位,减少占地面积,简化系统设计,集成方便。
智能磁驱输送线是由多个动子组成的模块,可以在直线、环形或接驳型等多种运输轨道上进行输送运动。每个动子的移动可根据项目需求自由编程,实现同步或异步控制,满足柔性智能生产线的要求。

正运动技术解决方案:
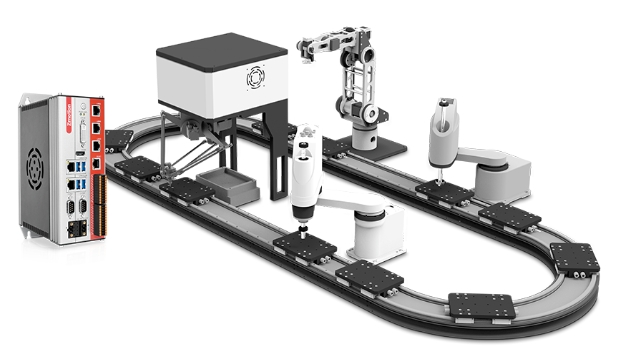
基于智能磁驱输送线系统的广阔市场应用前景,正运动适时推出了基于VPLC711视觉运动控制一体机的智能磁驱多动子输送线运动控制解决方案,协助客户部署“磁驱柔性生产线”和“磁悬浮输送线”。
支持多达254个动子在单一导轨上独立快速移载和灵活组合,自由调节站点节拍。方案可控制动子与机械手等外部执行机构联动,配合视觉系统和高精度位置传感器、驱动器等组件,助力客户实现输送与加工一体化集成,具备高速高精、低噪音、高柔性生产的特性,可大幅提升产线利用率、调度能力、生产效率和定位精度。
集成动子防撞规划、多工位协同、视觉识别功能,支持低代码开发和冗余功能,满足提升生产效率、系统灵活性、稳定性、降低维护成本和兼容性需求。快速部署工艺流程,减少机器停机时间,提升吞吐效率。
01 VPLC711在智能磁驱输送线的应用
正运动智能磁驱输送线解决方案设计
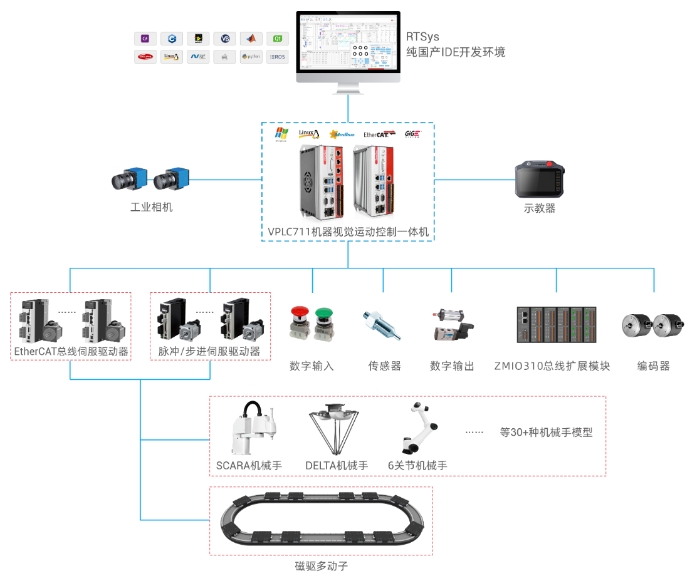
20DI:接启动/复位/停止按钮、气压检测、编码器等;
20DO:高速输出口接工业相机的硬件触发、供料器、破/吸真空等;
EtherCAT接口:接EtherCAT总线驱动器,控制机械手、磁驱输送线上的多动子;
4路单端脉冲输出:接脉冲/步进驱动器、控制其它运动轴;
EtherNET接口:千兆网口,接支持GIGE协议的面阵相机,实现视觉定位纠偏或与网口设备通讯。
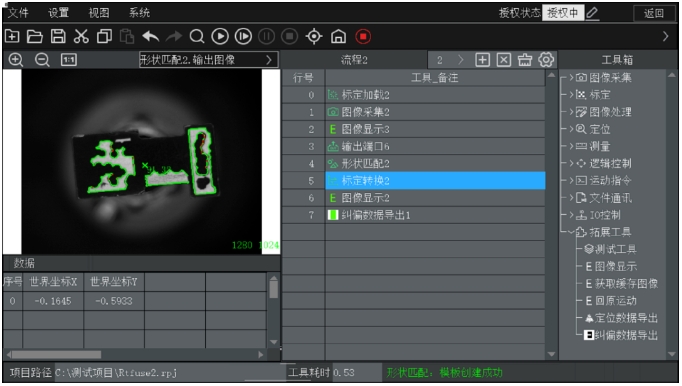
运动控制与机器视觉实现过程
(1)机器视觉
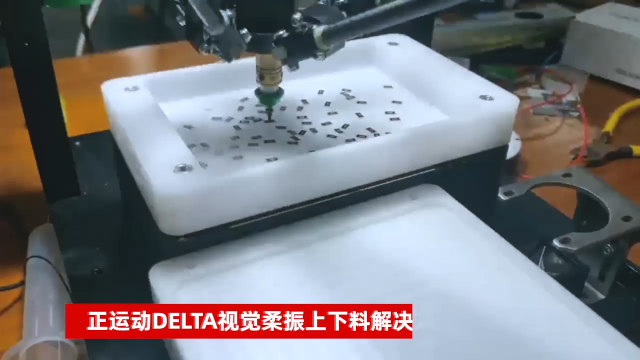
机器视觉定位主要用到形状匹配功能,通过预先设定的特征,如形状、尺寸、Mark点等来实现目标匹配定位,以此来获取柔振盘上等上料位的物料位置,然后通过坐标系数校准,将物料的世界坐标输送给执行机构,进行上下料、点胶、固化、锁付、激光焊接、装载和卸载等应用。
(2)运动控制
在磁驱多动子过程中,控制器实时获取多个动子的位置信息和速度。通过正运动技术内置的磁驱多动子运动控制算法和多动子防撞算法,精准计算每个动子所需的电磁力大小和方向,协调控制多个动子,有序地按照预定轨迹运行。然后再通过多轴联动控制,控制动子和机械手协同作业,有效避免碰撞,提高运行效率。
以下是正运动解决方案控制多个动子运动示意图:
同步运动控制
异步运动控制
正反运动控制
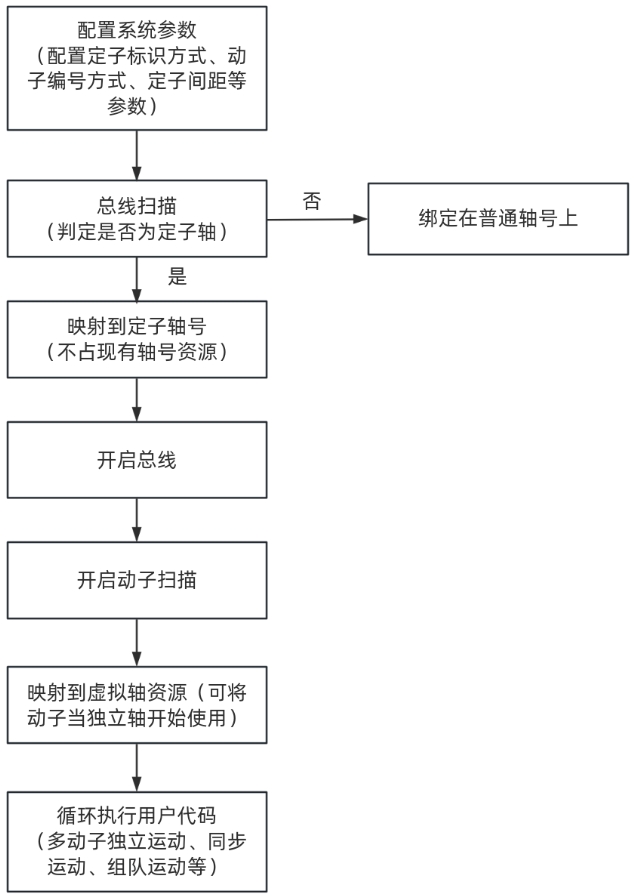
磁驱多动子程序流程
方案核心优势
▌灵活度高
每个动子均能独立操控,以完成复杂的输送、排序及加工任务。用户可根据需求灵活配置工艺增减,可满足多品种、小批量生产的需求。
▌节约成本
能够减少机械设备部件的磨损程度,降低维护费用,进而延长设备的使用寿命。
▌高精度同步控制与冗余控制
通过EtherCAT总线多轴同步控制和冗余控制,可确保系统高精度、高可靠性地运行,显著提升生产效率,满足严格的工业控制要求。同步周期最小可达125us!
▌算法集成优势
集成动子防撞与机器人控制等算法,内部可实现动子与机器人数据高效交互。
▌开发与定制化
提供代码开发平台,兼容多种运行环境与高级语言编程,支持二次开发。
用户可使用C语言自定义,同时支持与客户共同开发指定控制方式的多动子环形线函数。
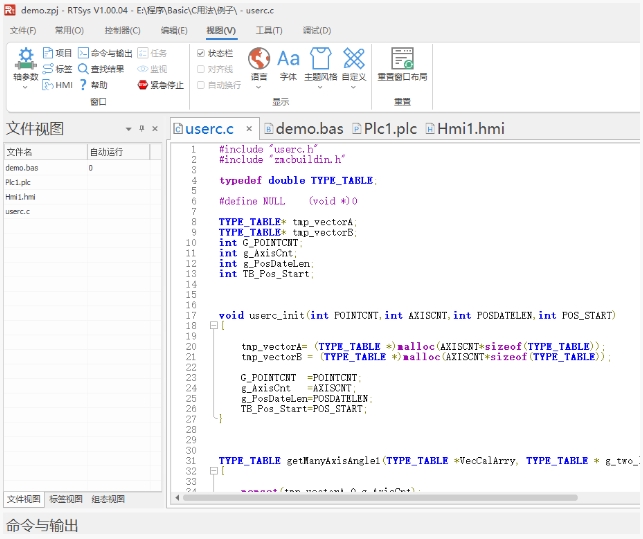
C语言编译器
▌功能丰富
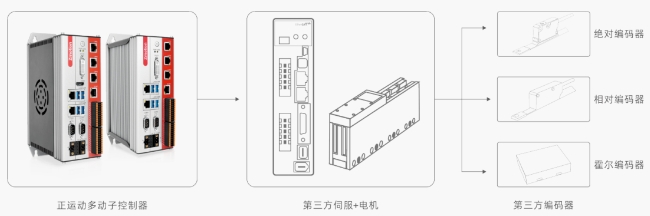
具备丰富的运动控制功能、动子专用运动控制API接口,兼容多种编码器协议及类型。
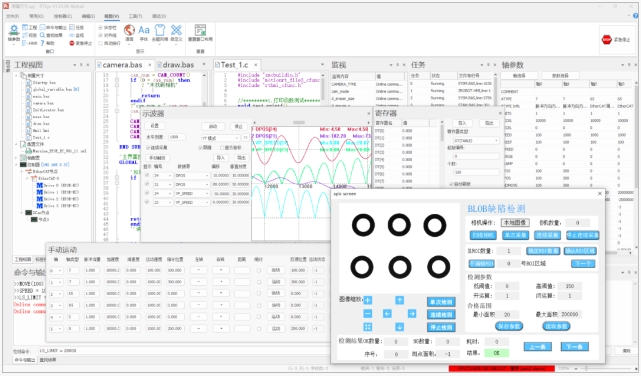
▌测试与监控
支持纯国产RTSys IDE开发调试软件仿真测试,可实时监控动子位置并校准。
▌系统集成方便
支持多种通讯协议和接口,能够无缝集成到各类磁驱输送线系统中,简化了系统集成过程。
▌多样化线体布局
后续会支持多种线体布局方式:圆弧段/岔道/分流处理,可结合客户的工艺,空间等需求规划出最合理的线体布局!
02 VPLC711机器视觉运动控制一体机
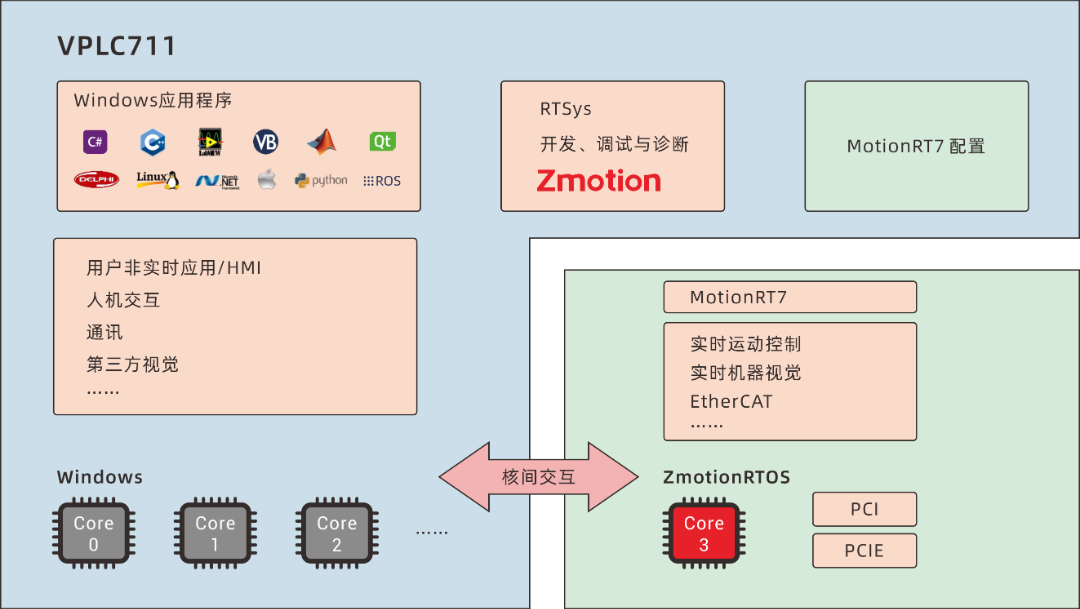
VPLC711是一款基于x86平台和Windows操作系统的高性能机器视觉EtherCAT运动控制器,可脱机运行,支持丰富的视觉和运动控制功能,大幅简化视觉与运动控制项目的配置流程。
同时内置了运动控制实时内核MotionRT7,形成一种开放式IPC形态实时软控制器/软PLC,为用户提供灵活集成的运动控制+视觉一体化解决方案。
VPLC系列机器视觉运动控制一体机的安装与拆卸过程便捷,占地空间小,还能与其它控制单元部件(如伺服驱动器、传感器、编码器、控制阀等)无缝集成,提供一个完整端到端的视觉运动控制解决方案。

可选6-64轴运动控制(脉冲+EtherCAT总线)
内置实时内核MotionRT7,支持第三方视觉软件
板载20路通用输入(其中10路为高速输入),20路高速输出
支持EtherCAT冗余功能,解决单点故障停机,自动诊断并持续运行,增强系统可靠性,简化维护工作
多核并行运算,能够高效处理运动控制,机器视觉等自动化设备核心任务
正运动技术专注于运动控制技术研究和通用运动控制软硬件产品的研发,是国家级高新技术企业。正运动技术汇集了来自华为、中兴等公司的优秀人才,在坚持自主创新的同时,积极联合各大高校协同运动控制基础技术的研究,是国内工控领域发展最快的企业之一,也是国内少有、完整掌握运动控制核心技术和实时工控软件平台技术的企业。主要业务有:运动控制卡_运动控制器_EtherCAT运动控制卡_EtherCAT控制器_运动控制系统_视觉控制器__运动控制PLC_运动控制_机器人控制器_视觉定位_XPCIe/XPCI系列运动控制卡等。
-
运动控制器
+关注
关注
2文章
400浏览量
24701 -
机器视觉
+关注
关注
161文章
4365浏览量
120263 -
一体机
+关注
关注
0文章
888浏览量
32707
发布评论请先 登录
相关推荐


工控一体机在智能机器人领域应用的优势与市场展望


VPLC系列机器视觉运动控制一体机在五轴联动点胶上的应用
工业一体机在智能分拣中的应用

工业一体机在物流智能设备中的意义
聚徽触控-工控一体机和 PLC 一体机有什么不同

工业控制电脑一体机在煤矿工业的应用
机器视觉运动控制一体机在喇叭跟随点胶上的应用
机器视觉运动控制一体机在光伏汇流焊机器人系统的解决方案





 工商网监
工商网监
评论