 基于APM32E103 SPI转CAN芯片MCP2515移植测试
基于APM32E103 SPI转CAN芯片MCP2515移植测试
CAN简介:CAN 是控制器局域网络 Controller Area Network 的缩写,是 ISO 国际标准化的串行通信协议,支持 CAN 协议 2.0A 和 2.0B。在 CAN 协议中,发送者以广播形式把报文发送给所有接收者,节点在接收报文时,会经过过滤器组根据标识符决定是否需要该报文,这种设计节省了 CPU 的开销。
APM32E103系列支持CAN协议 2.0A 和 2.0B,通信波特率最大为 1Mbit/s,并且拥有双CAN接口,能适应更多的应用场合。
偶尔会有三个以上CAN接口需求或者需要在没有CAN接口的芯片上使用CAN,就可以考虑使用外接协议转换芯片,将其他通讯接口转接成CAN接口。
查找发现比较常用的就是MCP2515,带有SPI接口的独立CAN控制器。
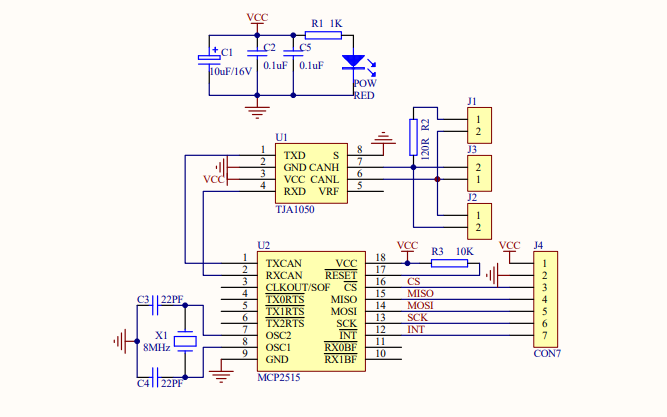
MCP2515是独立的控制器局域网(CAN)控制器,实现CAN规范,版本2.0B。它是有能力的发送和接收标准和扩展数据和远程帧。MCP2515有两个接受掩码和六个接受过滤器被用来过滤掉不需要的消息,因此减少了主机MCU的开销。MCP2515与微控制器(mcu)的连接通过一个工业标准串行外设接口(SPI)来实现的。
在网上可以直接买到MCP2515的模块,方便直接在开发板上用杜邦线接出来测试。
附带的资料包是基于51单片机的例程,需要修改移植到APM32的例程中。
移植基于APM32E10x_SDK_V1.2中的SPI_FullDuplex例程进行修改移植。
为了方便使用,硬件SPI和软件SPI都进行了定义初始化,通过宏定义来切换。
#defineSPI_S//SPI_H
软件SPI只需要初始化用到的IO引脚,硬件SPI就需要对SPI进行初始化配置。
MCP2515有一个中断脚,在总线上有CAN型号是会有下拉型号,告诉MCU需要准备进入接收状态。
所以需要在MCU上配置个外部中断引脚,用于快速响应。
voidMCP2515_GPIO_Init(void)
{
GPIO_Config_TGPIO_configStruct;
EINT_Config_T EINT_configStruct;
RCM_EnableAPB2PeriphClock(RCM_APB2_PERIPH_GPIOA);
GPIO_configStruct.pin =GPIO_PIN_0;
GPIO_configStruct.mode =GPIO_MODE_IN_PU;
GPIO_Config(GPIOA,&GPIO_configStruct);
GPIO_ConfigEINTLine(GPIO_PORT_SOURCE_A,GPIO_PIN_SOURCE_0);
/* Configure Button EINT line*/
EINT_configStruct.line=EINT_LINE_0;
EINT_configStruct.mode =EINT_MODE_INTERRUPT;
EINT_configStruct.trigger =EINT_TRIGGER_FALLING;
EINT_configStruct.lineCmd =ENABLE;
EINT_Config(&EINT_configStruct);
/* Enable and setButton EINT Interrupt to the lowest priority */
NVIC_EnableIRQRequest(EINT0_IRQn,0x0f, 0x0f);
}
SPI初始化完成后需要对MCU2515的寄存器进行初始化配置,配置CAN通讯的波特率工作模式等。
voidMCP2515_Init(void)
{
u16 i=0;
unsigned char temp=0;
MCP2515_Reset(); //发送复位指令软件复位MCP2515
Delay_Nms(1); //通过软件延时约nms(不准确)
//设置波特率为250Kbps
MCP2515_WriteByte(CNF1,CAN_250Kbps);
MCP2515_WriteByte(CNF2,0x80|PHSEG1_3TQ|PRSEG_1TQ);
MCP2515_WriteByte(CNF3,PHSEG2_3TQ);
MCP2515_WriteByte(TXB0SIDH,0xFF);//发送缓冲器0标准标识符高位
MCP2515_WriteByte(TXB0SIDL,0xE0);//发送缓冲器0标准标识符低位
MCP2515_WriteByte(RXB0SIDH,0x00);//清空接收缓冲器0的标准标识符高位
MCP2515_WriteByte(RXB0SIDL,0x00);//清空接收缓冲器0的标准标识符低位
MCP2515_WriteByte(RXB0CTRL,0x20);//仅仅接收标准标识符的有效信息
MCP2515_WriteByte(RXB0DLC,DLC_8);//设置接收数据的长度为8个字节
MCP2515_WriteByte(RXF0SIDH,0x00);//配置验收滤波寄存器n标准标识符高位
MCP2515_WriteByte(RXF0SIDL,0x00);//配置验收滤波寄存器n标准标识符低位
MCP2515_WriteByte(RXM0SIDH,0x00);//配置验收屏蔽寄存器n标准标识符高位
MCP2515_WriteByte(RXM0SIDL,0x000);//配置验收屏蔽寄存器n标准标识符低
MCP2515_WriteByte(CANINTF,0x00);//清空CAN中断标志寄存器的所有位(必须由MCU清空)
MCP2515_WriteByte(CANINTE,0x01);//配置CAN中断使能寄存器的接收缓冲器0满中断使能,其它位禁止中断
MCP2515_WriteByte(CANCTRL,REQOP_LOOPBACK|CLKOUT_ENABLED);//将MCP2515设置为环回模式,退出配置模式
temp=MCP2515_ReadByte(CANSTAT);//读取CAN状态寄存器的值
if(OPMODE_NORMAL!=(temp &&0xE0))//判断MCP2515是否已经进入正常模式
{
MCP2515_WriteByte(CANCTRL,REQOP_LOOPBACK|CLKOUT_ENABLED);//再次将MCP2515设置为环回模式,退出配置模式
}
}
MCP2515的初始化部分基本结束,接下来就是到main中编写个收发测试。
可以看到MCP2515是配置成环回模式,也就是自发自收,方便测试SPI配置和MCP2515的配置是否正确。
intmain(void)
{
APM_MINI_LEDInit(LED2);
APM_MINI_LEDInit(LED3);
APM_MINI_LEDOff(LED2);
APM_MINI_LEDOff(LED3);
SPI_MCP2515_Init();
MCP2515_Init();
MCP2515_GPIO_Init();
TMR5_INIT();
while(1)
{
//向CAN总线发送数据
if(timer_flag==0x01) //定时发送
{
timer_flag=0x00;
if(++can_tx_msg.StdId>1000)can_tx_msg.StdId=0x00; //CANID每发送一条报文,自加1
memcpy(can_tx_msg.Data, CAN_T_Buffer,8); //取报文数据放入缓冲区
CAN_Send_Buffer(&can_tx_msg);
APM_MINI_LEDToggle(LED2);
}
//接收CAN数据
if(can_tx_flag==0x01) //判断中断标志位
{
CAN_Receive_Buffer(&can_rx_msg);
can_tx_flag=0x00;
}
}
}
将杜邦线按照引脚配置,接好线后仿真就能测试回环模式下收发数据了。
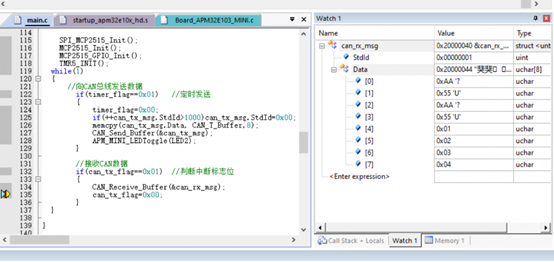
可以看到断点打到接收部分,可以接收到CAN数据,与发送的数据一致。
如果有其他can设备或者CAN分析仪的话,可以将工作模式改成普通模式,进行设备间的通讯。
-
控制器
+关注
关注
112文章
16240浏览量
177599 -
接口
+关注
关注
33文章
8537浏览量
150906 -
CAN
+关注
关注
57文章
2725浏览量
463464 -
局域网络
+关注
关注
0文章
18浏览量
7108
原文标题:APM32芯得 EP.45 | 基于APM32E103 SPI转CAN芯片MCP2515移植测试
文章出处:【微信号:geehysemi,微信公众号:Geehy极海半导体】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基于MCP2515的多路CAN总线接口电路设计






 工商网监
工商网监
评论