 CAN总线与其他串行通信协议比较
CAN总线与其他串行通信协议比较

CAN总线与其他串行通信协议相比,具有其独特的特点和优势。以下是对CAN总线与UART、I2C、SPI等常见串行通信协议的比较:
一、基本特性比较
| 协议名称 | 引脚 | 双工方式 | 时钟 | 电平 | 设备应用场景 |
|---|---|---|---|---|---|
| UART | TX、RX | 全双工 | 异步 | 单端 | 点对点,两个设备互相通信 |
| I2C | SCL、SDA | 半双工 | 同步 | 单端 | 多设备,一个主控外挂多个模块 |
| SPI | SCK、MOSI、MISO、SS | 全双工 | 同步 | 单端 | 多设备,一个主控外挂多个模块(高速) |
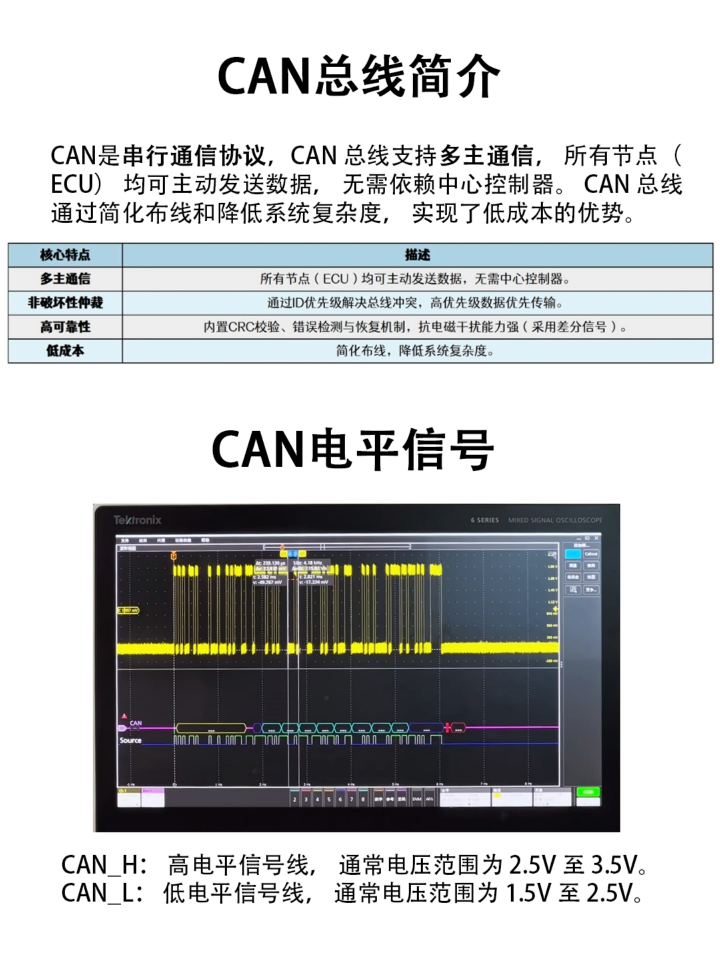
| CAN | CAN_H、CAN_L | 半双工 | 异步 | 差分 | 多设备,多个主控互相通信 |
二、连接与传输方式
- CAN总线 :
- UART :
- 使用单端信号进行数据传输。
- 需要预先约定bit的传输速率,不需要同步的时钟。
- 通常用于点对点的设备通信。
- I2C :
- 使用单端信号和同步时钟进行数据传输。
- 支持多设备连接,但需要一个主控设备来管理通信。
- 通常用于低速、短距离的通信。
- SPI :
- 使用单端信号和同步时钟进行数据传输。
- 支持全双工通信,数据传输速率较高。
- 通常用于高速、短距离的通信,如主控与外设之间的连接。
三、优势与特点
- CAN总线 :
- UART :
- I2C :
- 接口线少,控制方式简单。
- 支持多设备连接,但需要一个主控设备。
- 适用于低速、短距离的通信,如传感器与微控制器之间的连接。
- SPI :
- 数据传输速率高。
- 支持全双工通信。
- 适用于高速、短距离的通信,如主控与高速外设之间的连接。
四、应用场景
- CAN总线 :
- 汽车ECU之间的通信。
- 工业控制网络中的设备通信。
- 分布式控制系统中的节点通信。
- UART :
- 嵌入式系统中的设备通信。
- 微控制器之间的通信。
- 低速、短距离的通信场景。
- I2C :
- 传感器与微控制器之间的通信。
- 低速外设与主控之间的通信。
- 需要节省接口线数量的通信场景。
- SPI :
- 高速外设与主控之间的通信。
- 需要全双工通信的场景。
- 对数据传输速率有较高要求的通信场景。
综上所述,CAN总线与其他串行通信协议相比,在连接与传输方式、优势与特点以及应用场景等方面都有其独特之处。在选择通信协议时,需要根据具体的应用场景和需求进行综合考虑。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
收发器
+关注
关注
10文章
3836浏览量
111441 -
CAN总线
+关注
关注
146文章
2050浏览量
135476 -
串行通信协议
+关注
关注
0文章
24浏览量
7922
发布评论请先 登录
相关推荐
热点推荐
CAN协议的深度剖析
CAN(Controller Area Network)协议是一种广泛应用于汽车电子、工业自动化等领域的串行通信协议,由德国Bosch公司在1980年代开发,旨在解决复杂系统中多个电子

省时省力,CAN总线一站式开发指南
CAN (Controller Area Network,控制器局域网)是一种专为严苛环境设计的串行通信协议,以其高可靠性、实时性和强大的错误检测能力,成为汽车电子与工业控制领域的“通用

机器人通信协议EtherCAT和CAN如何选择
当下,虽然行业中存在许多通信协议,但业内人士普遍认为,EtherCAT和CAN两大协议,是机器人行业未来最重要的两大协议。
基于FPGA的I2C通信协议设计
I2C(Inter-Integrated Circuit)是一种由飞利浦半导体(现为恩智浦半导体)在1980年代初开发的同步、串行、半双工的总线型通信协议。主要用于近距离(同一块印刷电路板(PCB
实操用一台示波器解码CAN总线通信
给大家说一下:CAN总线是一种串行通信协议,主要用在汽车领域,目前也延伸到其它行业,比如传播行业、自动化工业等CAN

通信协议IIC与SPI最全对比分析
)通信协议,这意味着总线中的只有一支中心设备能发起通信。当SPI主设备想读/写从设备时,它首先拉低从设备对应的SS线(SS是低电平有效),接着开始发送工作脉冲到时钟线上,在相应的脉冲时间上,主设备把信号
发表于 12-10 06:04
Xilinx FPGA串行通信协议介绍
Xilinx FPGA因其高性能和低延迟,常用于串行通信接口设计。本文深入分析了Aurora、PCI Express和Serial RapidIO这三种在Xilinx系统设计中关键的串行通信协
2025全球CAN总线网关转换模组选型推荐与解决方案解析
。CAN总线转换模组作为CAN总线与其他通信协议(如以太网、串口、USB等)的桥梁,被广泛应用于

双轨速成:掌握CAN总线应用的实战秘籍
局域网)是一种广泛应用于工业控制、汽车电子等领域的实时通信协议,由德国博世公司于1986年提出并标准化(ISO 11898)。 其核心采用多主(Multi-Master)总线架构,通过差分信号传输实现高抗干扰能力,支持节点间以广播形式进行高效、可靠的数据交换。 典型应
120Ω的秘密:CAN总线终端电阻的重要性
CAN总线作为一种广泛应用的工业通信协议,其终端电阻的作用不容忽视。本文将详细探讨CAN总线终端电阻的重要性及其在

如何用泰克MSO5系列混合信号示波器调试IoT和CAN总线
随着物联网(IoT)技术的快速发展,设备之间的通信协议变得愈发复杂。CAN(Controller Area Network)总线作为一种可靠、高效的串行




评论