 Made with KiCad(九十三):CAN 总线步进电机闭环控制板
Made with KiCad(九十三):CAN 总线步进电机闭环控制板
Made with KiCad 系列将支持新的展示方式。直接将以下链接复制到浏览器中:
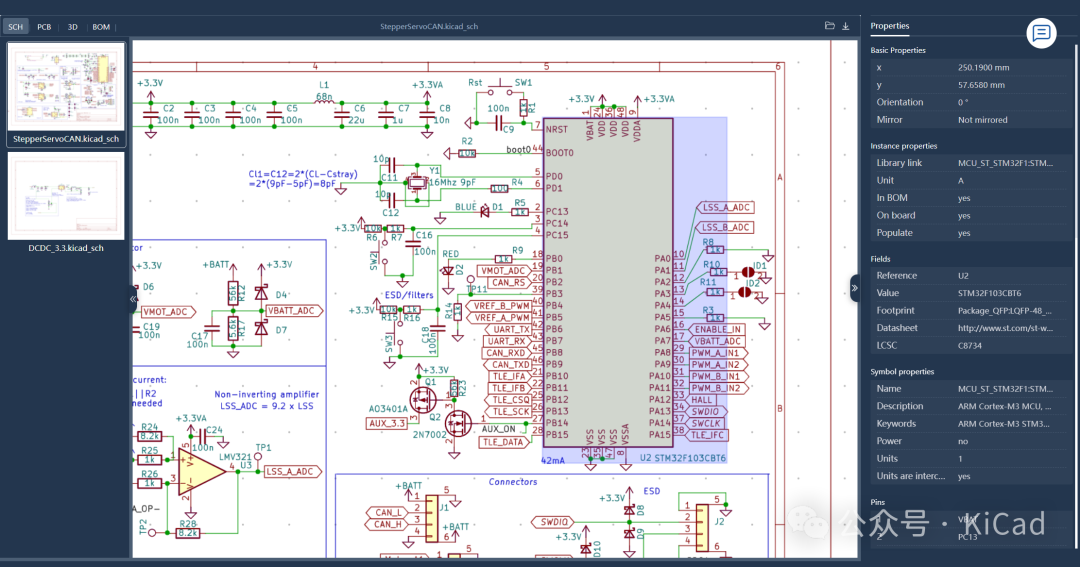
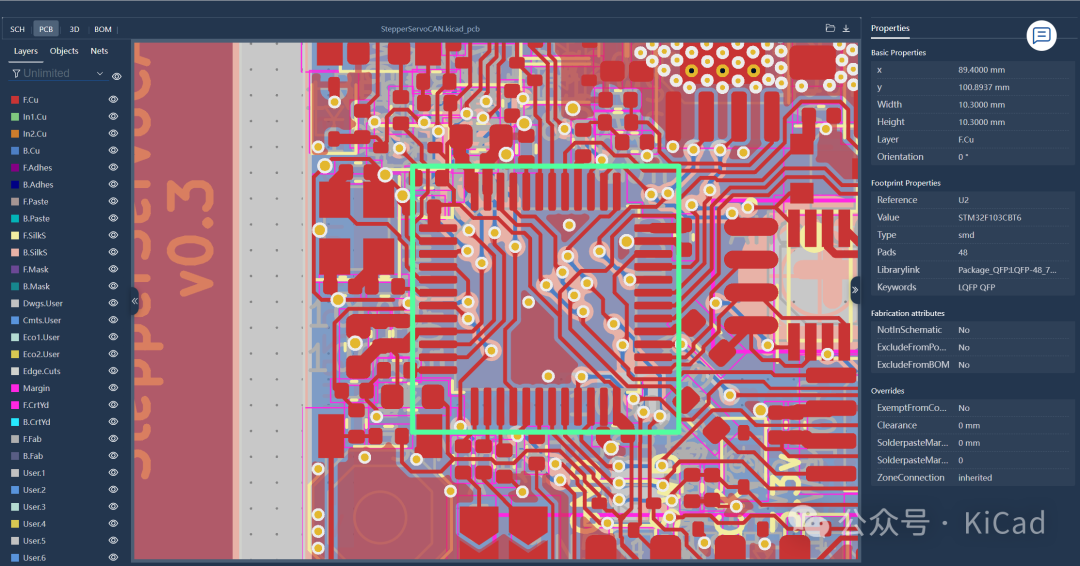
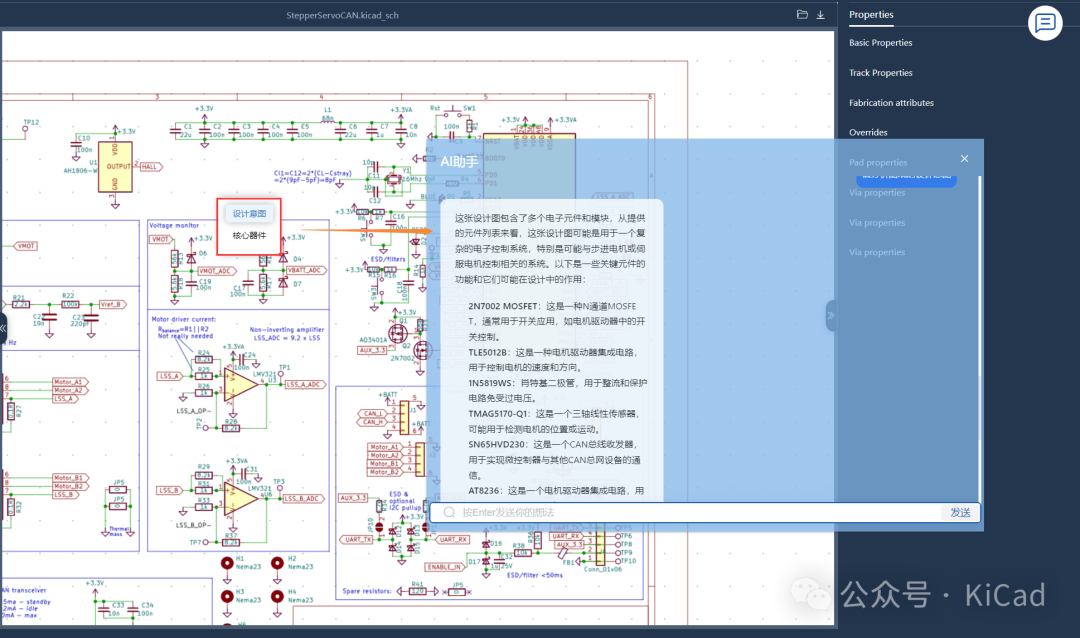
https://www.eda.cn/ecadViewer/viewerPage/?xmlId=7a16c2c0-7b76-4813-8ad8-b613a882d9cd&fileZip=https%3A%2F%2Fwww.eda.cn%2Fdata%2Fdesign%2Fdemo%2F7a16c2c0-7b76-4813-8ad8-b613a882d9cd.zip 即可动态查看设计的原理图、PCB、3D 及 BOM,查询设计中器件、走线、焊盘的属性详情。还可以在原理图中与AI小助手互动,帮您更高效地学习设计细节:
注:目前移动端还未优化,建议在 PC 上查看。
概览
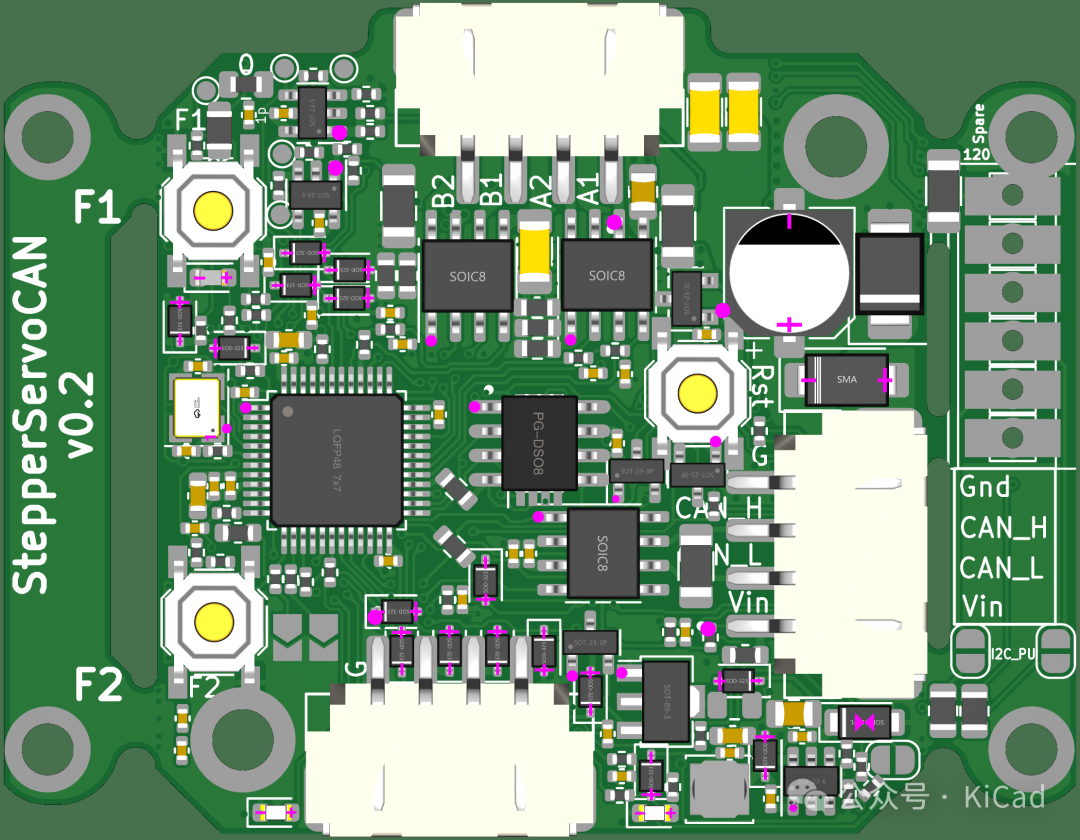
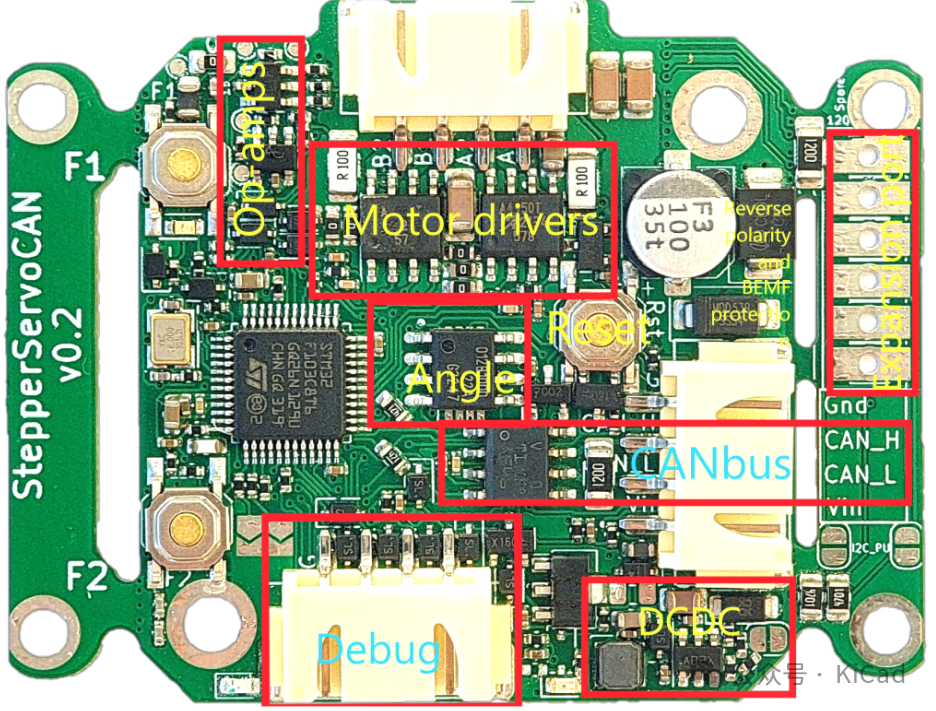
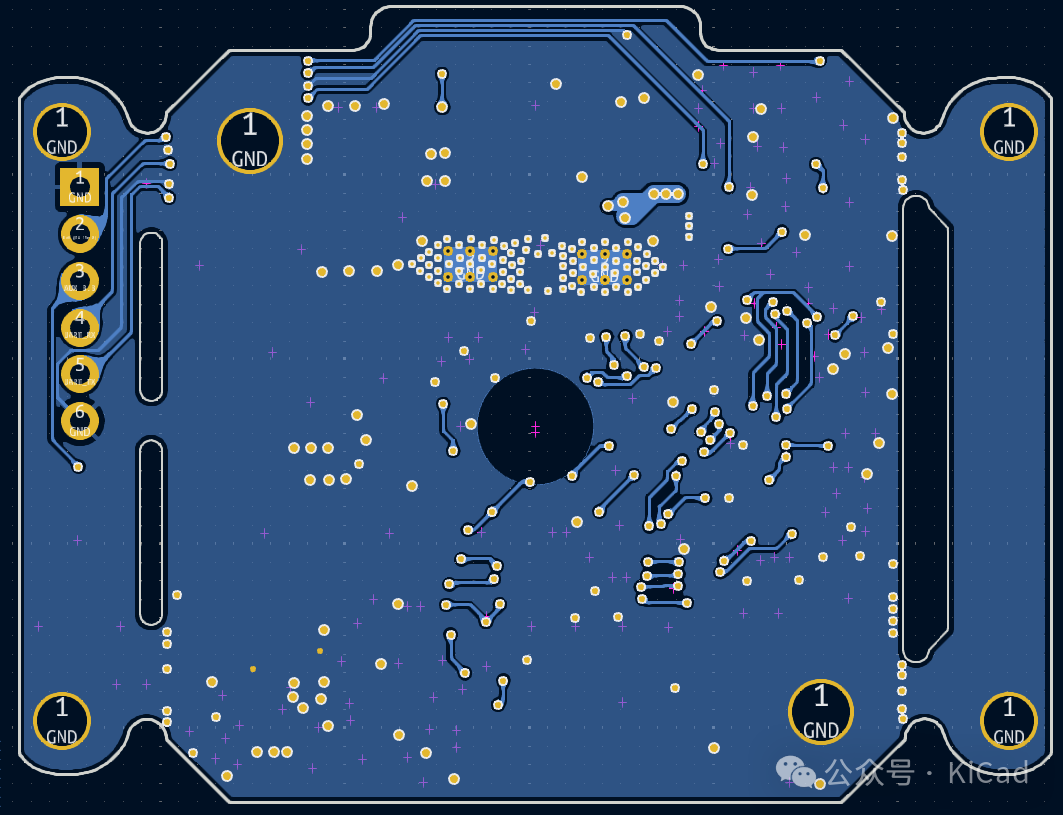
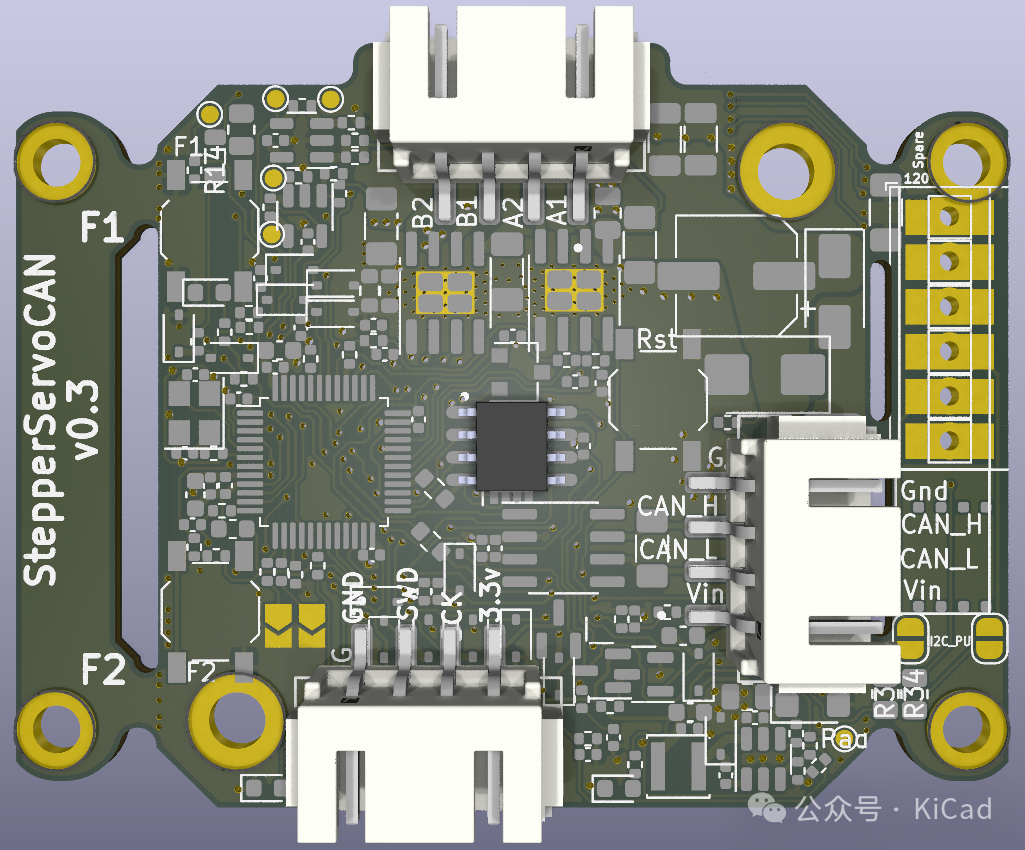
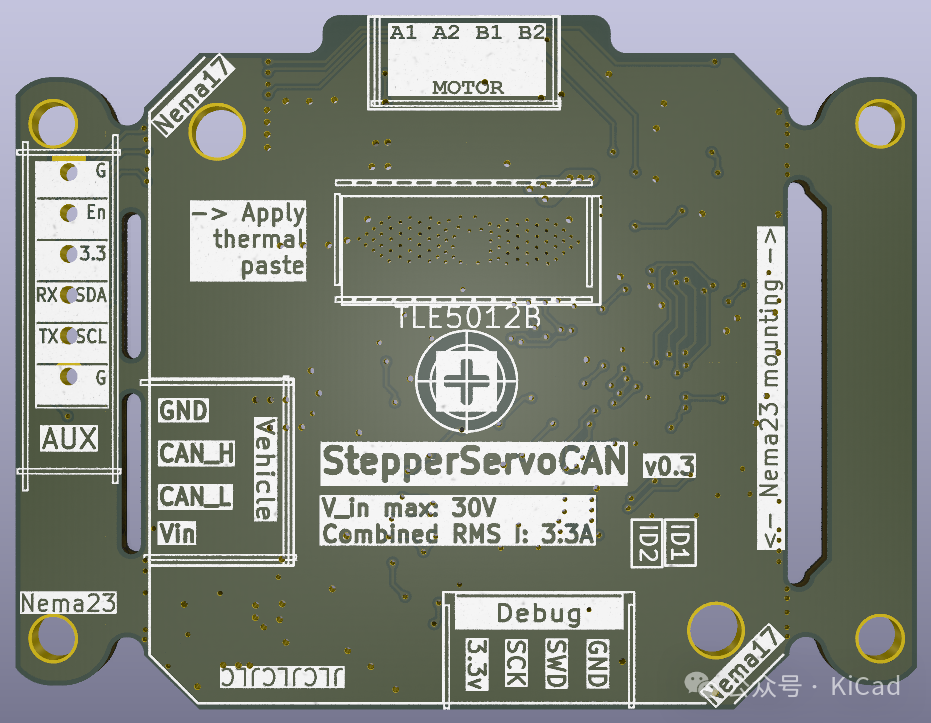
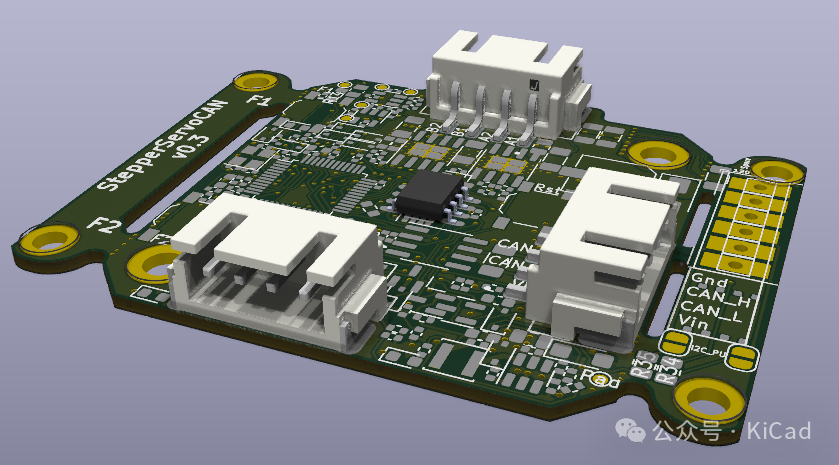
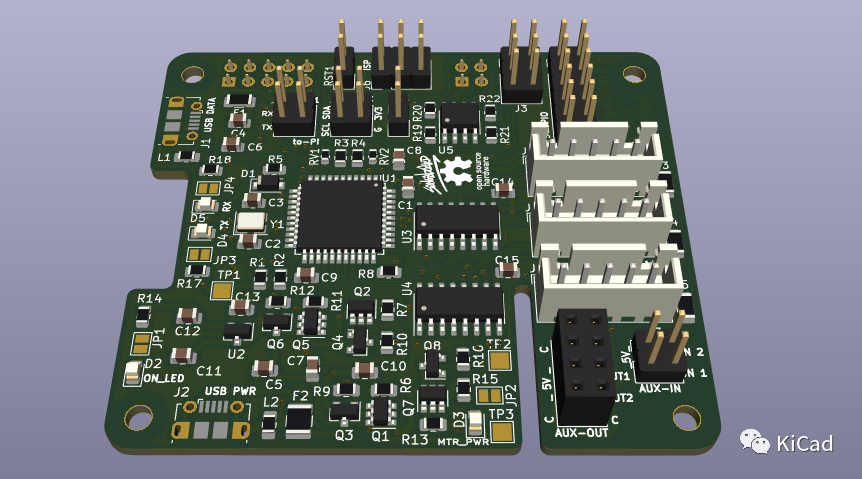
这款两相电机步进控制板具有一系列独特功能:闭环换向、CANbus 联网和开源。它特别适用于与用户交互和存在可变负载(转向、踏板、机械臂致动器)的低成本但坚固耐用的机器人技术。它能提供平稳、低噪音的扭矩输出,并能通过外部扭矩克服和逆转。控制器的设计使电机在外部旋转时不会产生阻力,并且控制功能被禁用。 控制器板适合 Nema17 和 Nema23 螺栓模式,可直接安装在电机背面,高度仅为 8 毫米。此外,如果不需要 Nema23 支持,还可以断开 PCB 的侧片,减小 PCB 的尺寸。 控制器的核心是一个磁传感器,其直径磁铁连接到电路板下的步进轴上。磁场穿透薄薄的 PCB 复合材料,由角度传感器芯片进行测量。为提高精确度并补偿磁铁偏差,控制器通过来回旋转进行初始校准。有关该过程的更多信息,请参阅固件部分。
低电流消耗允许控制器始终保持供电状态,并持续跟踪零角度和整数倍旋转。
输入/输出特性
电源电压:9-30V
CANbus (兼容 3.3V 和 5V)
SWD 调试端口(3.3V)
电机最大输出:
(连续)3.3A RMS 驱动电流
(1 秒)每相 3.3A 峰值失速电流
功能
电路板可用于驱动一个步进电机或两个直流电机
步进电机的高精度位置读取
如果空间有限,可将电路板拆开,从 Nema23 转换为 Nema17
具有过压保护功能的 freewheeling
CANbus 收发器
两个功能按钮和一个复位按钮
用于闪烁和配置的调试端口(带 ESD 保护)
反极性和电压尖峰保护
可选跳线焊盘,例如用于多电机识别
传感器
磁角度传感器
电流(低端)
电机驱动电压
电池驱动电压
PCB 温度
尺寸 Nema17 / Nema23
56mm x 40mm (+2.7) x 8mm (长/宽/高)
连接器类型
4 针 JST XH 2.5 毫米(汽车、调试、电机 - 电子保护,防止错误插入)
2 针端子 2.5 毫米(使能引脚)
固件
https://github.com/dzid26/StepperServoCAN/releases
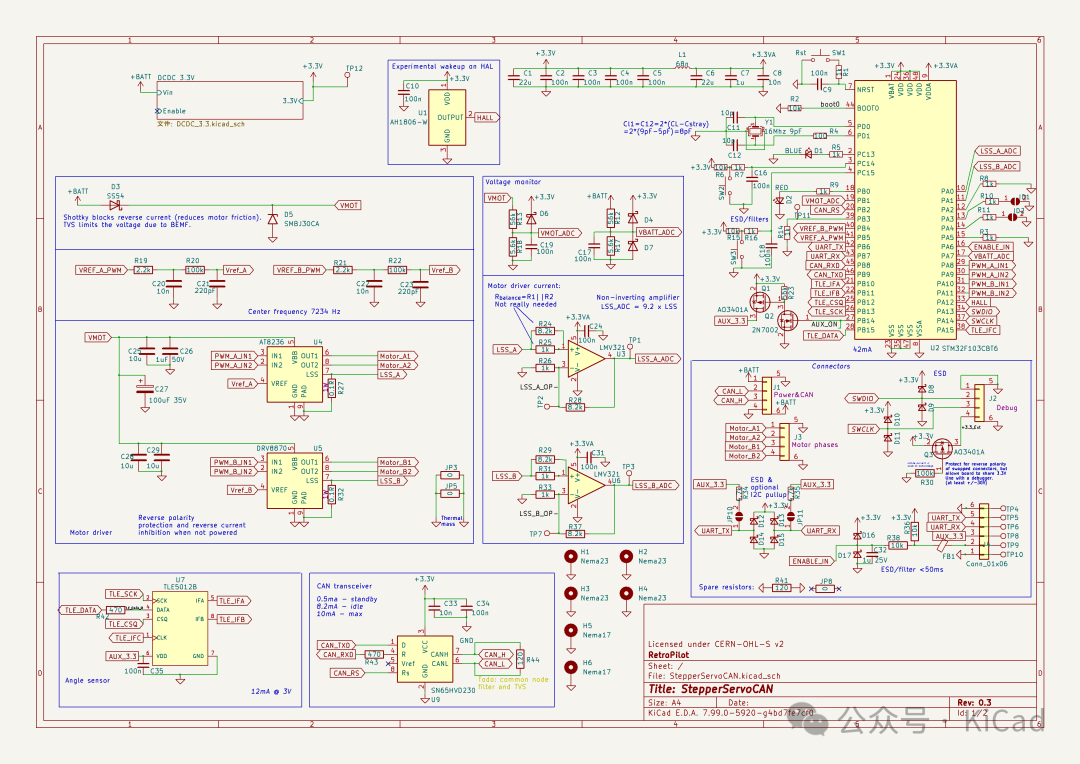
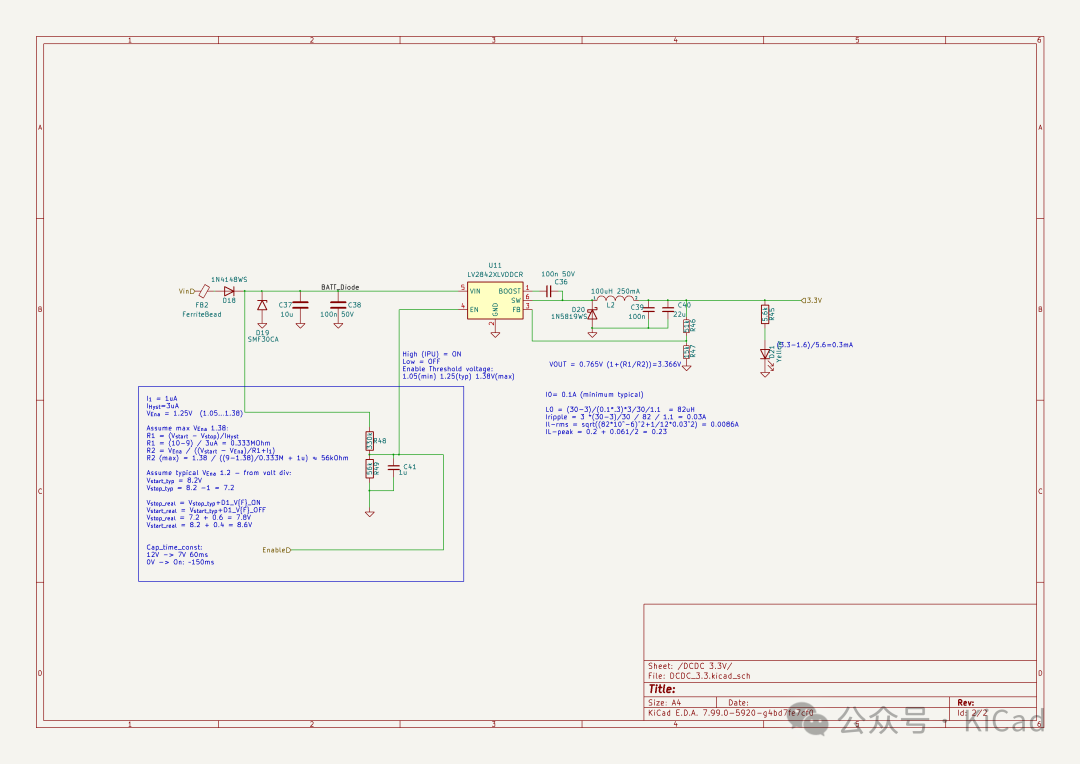
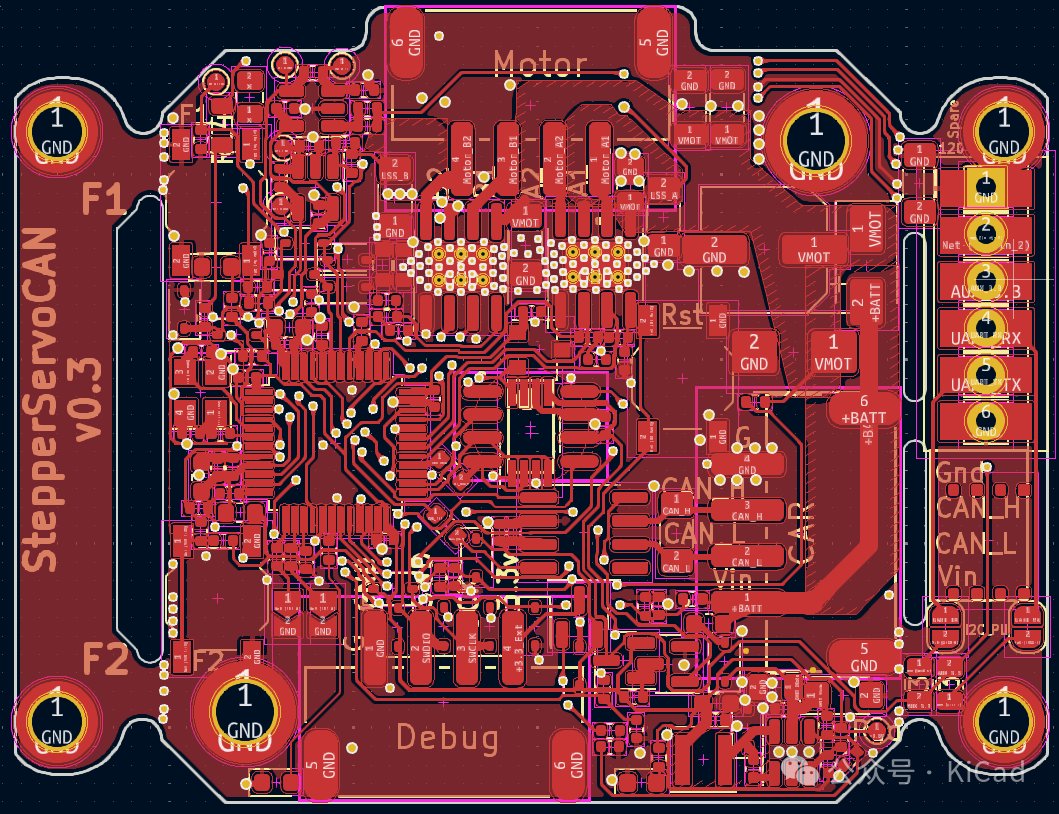
原理图 & PCB
License
GPL 3.0
仓库 & 下载
可以在Github中获取开源仓库:
https://github.com/dzid26/StepperServo-hardware
-
CAN总线
+关注
关注
145文章
1942浏览量
130693 -
步进电机
+关注
关注
150文章
3104浏览量
147403 -
闭环控制
+关注
关注
0文章
94浏览量
15587 -
KiCAD
+关注
关注
4文章
145浏览量
8733
发布评论请先 登录
相关推荐
传统步进电机转型闭环控制
总线控制与脉冲控制的区别以及开环、半闭环、闭环控制方式的区别在哪
闭环控制步进电机对比传统开环控制的优点
基于PLC间通信的步进电机远程闭环控制
剖析传统步进电机转型闭环控制


Made with KiCad(十一):Sangaboard步进电机控制板





 工商网监
工商网监
评论