 基于机载 LiDAR 技术植被茂密区小型滑坡识别与评价
基于机载 LiDAR 技术植被茂密区小型滑坡识别与评价

而江苏省溧阳地区为低山地貌,植被覆盖度较高,滑坡规模小,受滑坡规模和植被覆盖影响,该地区滑坡地质灾害识别难度很大。溧阳地区滑坡多为小型,规模大多在500m2以下,如何应用LiDAR数据识别植被茂密区小型滑坡是本文研究的目标之一。
一、引言
遥感技术自20世纪兴起,在各行各业中应用颇为广泛,地质灾害调查与判别分析是遥感技术的重要应用领域。20世纪90年代,遥感技术主要通过卫星光学影像(以Landsat和SPOT为代表)开展大型工程中大型地质灾害的调查。相比于传统光学遥感和InSAR技术,LiDAR系统采用的是主动式直接测量方法,垂向精度高,能够不受低光照、雾霾或云覆盖的影响,全天候全天时工作,且能够部分穿透植被,适宜于气候多变、条件复杂、高植被覆盖,且对高程精度要求较高区域的地形测量。因此,LiDAR技术在植被高覆盖区域的地质灾害调查与判别应用中具有明显优势。前人研究多集中在应用LiDAR数据开展大型滑坡地质灾害的识别,比如丹巴地区的滑坡、九寨沟震区滑坡、三峡库区滑坡等,这些地质灾害规模大、连片性好,多发育在高山峡谷区,有植被覆盖,但覆盖度有限,LiDAR识别效果好。而江苏省溧阳地区为低山地貌,植被覆盖度较高,滑坡规模小,受滑坡规模和植被覆盖影响,该地区滑坡地质灾害识别难度很大。溧阳地区滑坡多为小型,规模大多在500m以下,如何应用LiDAR数据识别植被茂密区小型滑坡是本文研究的目标之一。
研究区概况及数据源
2.1研究区概况
溧阳市西渚岭位于常州溧阳市天目湖镇(图1)。研究区高程介于75.4 ~203 m,高差为127.6 m,为低山地貌。该区域西、南、东三面环山,山体斜坡成阶梯状分布,山脊浑圆,植被覆盖度高。
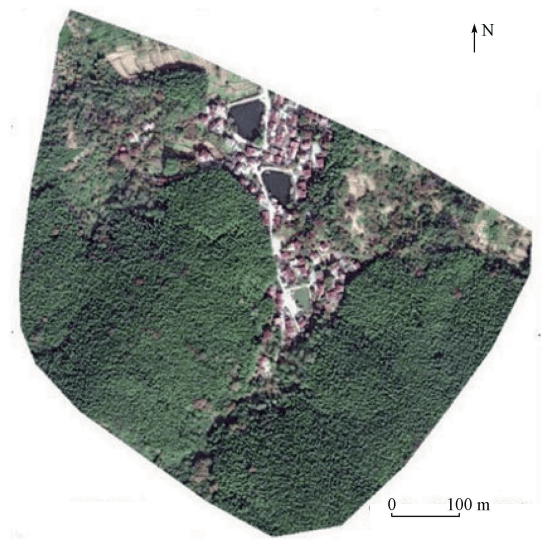
图1研究区地理位置示意
2.2数据源与处理
本次LiDAR数据采集飞行平台使用无人机系统,测量采用高精度轻小型激光雷达测量系统,数据采集与处理技术流程如图2所示。软件相结合的人工检查和手动滤波为辅助的混合方式,确保地面滤波结果的可靠性和准确性。
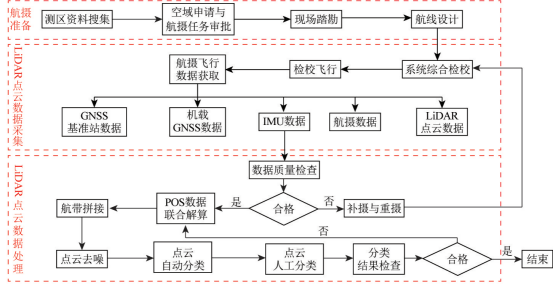
图2LiDAR 数据采集与处理流程
图3(a)为扫描获取的原始点云,其剖面如图3(b)所示,采用软件自动滤波能够将上部明显的非地面点滤除,再通过手工方式对错误分类点(包括将地面点错分为非地面点和非地面点错分为地面点2种情况)进行修正,最终结果如图3(c)。
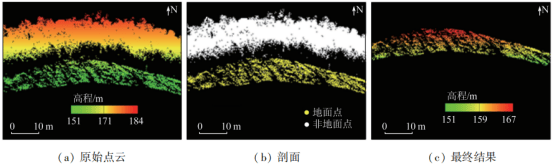
图3研究区原始点云及地面点提取效果
研究方法
3.1山体阴影分析
山体阴影图能够直观高效地表示地形地貌特征,通过模拟光线对地表的照射获取每个像元的照明值,并且综合分析研究区的不同方位角山体阴影图,能够发现很多微地貌特征。山体阴影图的计算主要有2个重要参数:太阳高度角(SEA)和太阳方位角(SAA)。为了模拟立体形态,SEA一般设置为45°,而不同方位生成的山体阴影图具有不同的立体效果。基于单侧光照下山体阴影图中总有部分区域处于阴影区,本文将2种太阳方位复合制作出双向山体阴影图,光照方向为135°和315°,如图4所示。
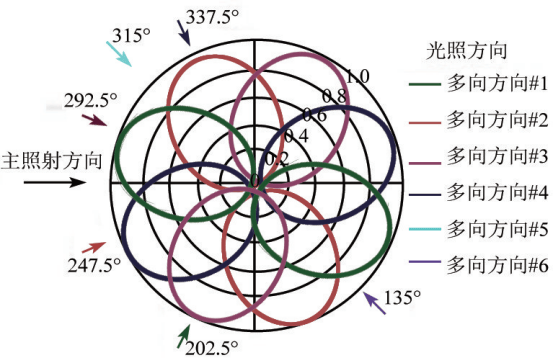
图4双向山体阴影图和多向山体阴影图中光线模拟方向
3.2彩色增强分析
山体阴影图为黑白图像,常见的8位数字灰度图像256级中人眼能分辨的数量大概在40个左右,所以灰度图像常有部分细节信息无法显现出来。因此,把灰度图像用伪彩色显示,能使图像中地物细节更好地被识别发现,本文采用了地形彩色渲染、影像函数增强法、图像融合色彩增强、RRIM彩色增强法四种彩色增强显示方法。
3.3NDVI滑坡因子分析
当前滑坡易发区评价采用的方式主要是选择与滑坡有关的因子,。滑坡评价的指标因子主要有高程、坡度、坡向、地表起伏度、地层岩性、断层构造、地震活动、居民点、植被覆盖度、道路和水系等 。在这些评价因子中,较大的空间尺度导致相关评价因子产生异质化,如地形地貌、地质条件、气候条件等差异较大,评价结果也自然具有明显的分区差异。本文区域属于小区域大比例尺滑坡易发性评价,采用传统评价方式难以确定滑坡易发区,小区域内滑坡发育条件的差异性主要表现在地形条件的差异。研究区滑坡发育与高程、坡度和地表起伏度具有很好的相关性,滑坡发育高程位于77~130m 之间,水平距离10m 范围内地表起伏度介于8~12m 之间,滑坡后缘坡度在40°以上,中前缘坡度在20°~40°之间。
因此,本文采用高程、坡度和地表起伏度3个地形指标来分析滑坡发育程度,三者组合构成彩色图像,采用遥感分类圈定滑坡易发区。
3.4支撑向量机模型
传统马氏距离、欧式距离等分类方法都是从数据类别统计的角度上来研究图像分类 ,而本文滑坡易发区识别中,滑坡样本数量少,样本数量难以满足传统监督分类。但支持向量机(SVM)适合有限样本(小样本)问题 。SVM的核心思想是把样本非线性映射到高维特征空间,使其线性可分,然后以结构风险最小化为归纳原则,求解能够将训练样本集划分为2类且几何间隔最大的一个分类超平面(图5)。图5中实心点和空心点代表2类样本,H为分类线,H1和H2分别为过各类中离分类线最近的样本且行分类线的直线,它们之间的距离即分类间隔。
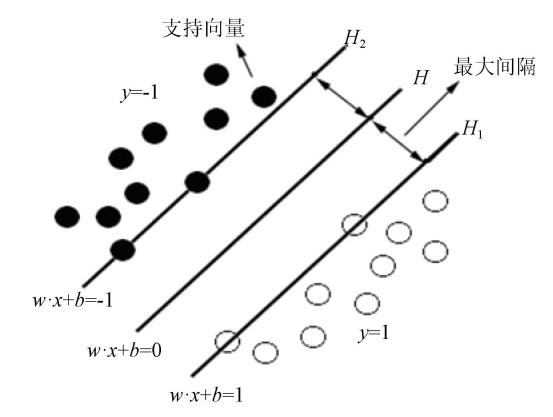
图5SVM 的基本思想示意图
结果与分析
4.1山体阴影效果及彩色增强分析
图6(a)和(b)分别为315°和135°这2个不同方位角下生成山体阴影图,可以看出,1和6山体阴面地形起伏明显,2和5山体阳面亮度过高,地形特征不明显。这说明单侧光线下的山体阴影图中,完全阴影面和太阳直射面的细节丢失成为无法避免的问题,但地形效果又得益于阴影,没有阴影就难以观察地形起伏状态。图6(c)为SAA值为315°和135°复合的山体阴影图,图件整体偏亮,在陡坎处有阴影显示地形起伏,这种方法避免了太阳直射方向的地形细节丢失,但在一些地形起伏小的区域细节丢失,如3处位置丢失地形起伏信息。在多向山体阴影图中(图6(d)),由于光线模拟方向的限制,该图中坡向为22.5° ~157. 5°的区域阴影色调基本不变,导致这部分信息丢失。
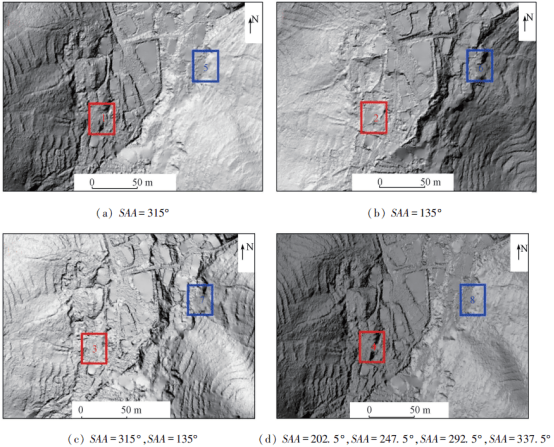
图6不同制作方式下的山体阴影图
综合来说,在单方向山体阴影图中,直射光照面地形效果较差,非直射光照面地形效果好;在双方向山体阴影图中,各个区域地形效果相对平衡,整体效果较好,但也有局部细节信息丢失;在多方向山体阴影图中,每个区域地形细节效果均弱于单方向山体阴影图中非直射光照条件下的地形效果。因此,在遥感解译过程中采用不同方向的单方向山体阴影图配合使用,而成果展示采用双方向或多方向山体阴影图。
从4种彩色增强显示方法成果(图7)中可以看出,4种彩色图既有地形起伏特征,又有色彩特征,视觉效果表达效果好。图7(a)为双向山体阴影与DEM透明叠合,图中蓝框中地形特征明显,细节清晰,但由于彩色DEM采用透明方式,使图件整体色调显得比较灰暗。图7(b)为影像函数色彩增强方法获得,影像色调适中,但由于该方法模拟单向光源照射,形成的图像在阳面地形特征不明显,如图中右侧蓝框地形特征不清晰。图7(c)为图像融合方法获的,该图像彩色鲜亮,地形特征比较明显,但由于彩色过于饱和,部分地形细节不够明显。图7(d)为RRIM方法计算获得,在蓝框中滑坡后缘明显与周围色调不同,能清晰反映边界。
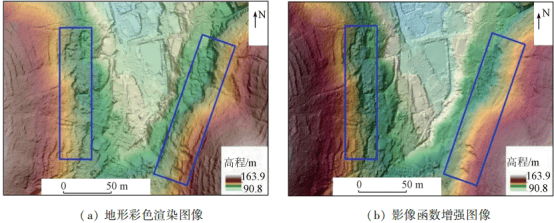
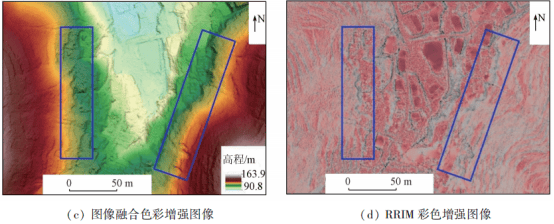
图7彩色增强显示效果图
4.2滑坡遥感识别分析
根据前期野外踏勘,研究区为低山地貌,自然山坡坡度多位于15°~30°,山坡植被为竹林地,风化层较厚,无基岩出露。区内发育地质灾害类型单一,为蠕变型滑坡,滑坡特征较明显,表现为滑坡后壁清晰,呈现弧形形态,后壁坡度45°以上;滑坡中后部土体拉裂,拉裂缝长度不一,约20~ 90 cm,宽度约10~30cm,受地表竹林落叶及草类植被覆盖而不明显(图8)。

图8研究区野外踏勘滑坡照片
传统的滑坡遥感解译一般都是基于形态特征、色调特征和纹理特征等进行解译,例如滑坡体呈簸箕形、“U”型,高分图像上可见滑坡壁、滑坡台阶、滑坡舌、滑坡裂缝、滑坡鼓丘等现象,色调、纹理与周围明显不同等 。这些标志主要应用于植被覆盖少的大型滑坡区域,而植被覆盖茂密区小型滑坡的识别与之不同,LiDAR技术解决了植被覆盖对滑坡影响的问题,但小型滑坡的规模导致其细节信息难以表现,其判识尤为困难。结合野外踏勘情况,对本区域小型滑坡的解译,主要依据有2个:一是滑坡整体形态特征和其纹理形态与周围的差异性,尤其是滑坡后缘的弧形特征(图9),影像上表现为弧形的色带弯曲与色带变化;二是量测滑坡体滑向与垂直滑向方向的高程变化趋势,如图A—A′剖面高程变化明显分为3段,由A—A′高程变化为缓和-急剧-缓和,表明滑坡后壁高程变化大,前缘临空性好,滑坡前缘隆起后变缓;B—B′剖面特征表明滑坡发生后形成两侧高,中间低的地形特征。利用机载LiDAR数据结合彩色增强图像及三维可视化场景模拟,在研究区范围内共识别和解译出地质灾害22处,经野外调查最终确认19处为滑坡地质灾害,解译精度为86.4%。
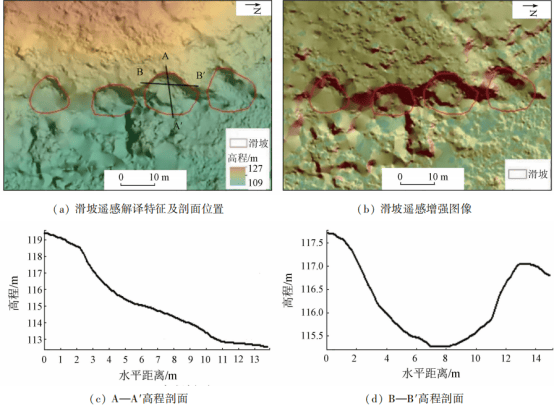
图9小型滑坡遥感解译特征
4.3基于SVM的滑坡易发区判别
研究区经遥感解译结合野外验证查明滑坡地质灾害19处,随机选取 13处滑坡作为学习样本,其他6处滑坡为检验样本。经SVM分类识别后的分类图需要进行碎小图斑删除合并等后处理,最终获得滑坡易发区分布图(图10)。将6个滑坡检验样本与基于SVM分类识别后的滑坡易发区进行空间叠加分析,#1,#3,#9和#17全部位于滑坡易发区内,#7和#13滑坡后缘位于滑坡易发区内,而前缘并未在易发区范围内,滑坡识别精度为81.91%。经过数据分析,滑坡识别错误的主要原因为滑坡前缘植被过于茂密,获取的点云数量过少,在坡度及地表起伏度2个指标中出现异常,但其后缘表现清晰,3项指标能正确反映地形特征。研究证明,滑坡易发区能指示出与滑坡发生条件类似的区域,为下一步潜在滑坡的调查指明了方向。
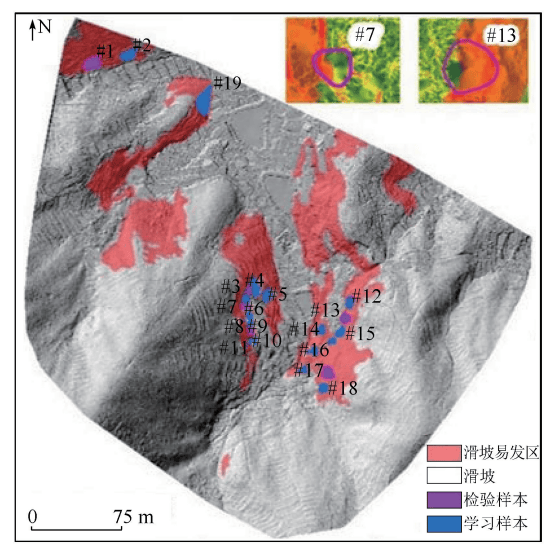
图10滑坡易发区分布
五、结论
本文利用无人机LiDAR技术获取研究区点云数据,通过增强数据可视化方式并结合滑坡解译标志识别了滑坡,提出了基于遥感分类思想的滑坡易发区评价方法,为植被茂密的重点区域大比例尺地质灾害识别与评价提供了新思路。主要结论如下:
研究区江苏溧阳西渚岭地区植被覆盖茂密,机载 LiDAR 技术具有较强的植被穿透能力,可以通过获取点云数据生产高分辨率 DEM,真实反映去除植被后的地形形态。应用 LiDAR 技术穿透植被获取点云数据,数据本身可视性较低,山体阴影分析是提高可视化程度的有效方法,该方法通过阴影体现地表起伏细节,阴影部分不可避免地丢失信息。不论是单向光源、双向光源还是多向光源模拟山体阴影,不可能实现既保留地形细节又剔除阴影。在实际使用过程中,进行遥感解译可以采用多个单向光源下的山体阴影图互为补充,而展示成果图可以采用双向光源或多向光源条件下形成的山体阴影图。

彩色图像相较于黑白图像更具有可识别性,因此本文采用 4 种方法探讨了如何在保留山体阴影地形信息情况下增加色彩。4 类方法各有特点,有的地形细节清晰,有的地形起伏明显,有的色彩鲜明,有的符合眼睛视觉效应。采用哪类色彩增强方法应结合识别对象特点。本区滑坡规模小,图像上主要通过滑坡整体形态特征和其纹理与周围的不同而判别,采用符合视觉效应的 RRIM 图像和图像融合色彩增强图像初步解译,然后结合具有地形细节信息的图像进行分析。利用机载 LiDAR 数据结合彩色增强图像及三维可视化场景模拟,在研究区范围内共识别和解译出地质灾害 22 处,经野外调查最终确认 19 处为滑坡地质灾害,解译精度 86. 4%。
基于 LiDAR 衍生数据可以判识已有的滑坡地质灾害,而那些易于滑动的区域,即潜在滑坡区根据相关数据难以判别,传统的滑坡易发区评价方法又不适应于小区域大比例尺的滑坡地质灾害易发区圈定。
因此,本文基于野外踏勘,借鉴遥感图像分类思维,以小区域内滑坡地质灾害与非滑坡区的差异因子作为波段,构建了遥感图像,而后考虑滑坡样本少的特点,采用SVM方法进行分类识别。经滑坡检验样本分析,滑坡识别精度为81.91%。实验证明,该方法能够实现小区域内滑坡易发区圈定,为滑坡地质灾害易发区评价提供了一种新的解决思路。
推荐:
无人机高光谱成像系统iSpecHyper-VM100
iSpecHyper-VM系列无人机高光谱成像系统配合定制开发的高性能稳定云台,能够有效降低飞行过程中无人机抖动引起的图像扭曲与模糊。该系统与大疆M350RTK无人机完美适配,广泛应用于农业、林业、水环境等行业领域,系统支持配件升级及定制化开发,为教育科研、智慧农业、目标识别、军事反伪装等行业高端应用领域提供了高性价比解决方案。
审核编辑 黄宇
-
光谱
+关注
关注
4文章
1064浏览量
37452 -
遥感
+关注
关注
0文章
258浏览量
17618 -
LIDAR
+关注
关注
11文章
369浏览量
31632
发布评论请先 登录
海康威视亮相2026边坡与滑坡工程技术创新大会
激光雷达LiDAR技术的工作原理和应用场景

机载雷达发射机干式高压电源的结构设计和固体灌封工艺技术

面向高动态战场的机载光电平台振动抑制技术体系:演进、挑战与前沿综述

MAX-S810机载多光谱相机在草地森林覆盖面统计中的应用

API自动化:淘宝评价管理工具的技术实现

航空机载通信:云端互联的数字翅膀
元服务交易评价
LiDAR线圈如何驱动无人驾驶技术
智驾感知系统中立体视觉相对于LiDAR的性能优势

无人机多光谱遥感在水生植被精细分类中的应用
订单评价内容采集接口技术解析

智能门锁厂商必看:如何选择最适合的小型二维条码识别模块




评论