 从特斯拉看智能驾驶未来发展
从特斯拉看智能驾驶未来发展
编者语:「智驾最前沿」微信公众号后台回复:C-0587,获取本文参考报告:《从特斯拉视角,看智能驾驶研究框架》pdf下载方式。
随着自动驾驶技术的快速发展,智能驾驶已成为汽车行业技术竞争的焦点。特斯拉作为该领域的先行者,通过对算法、硬件、数据闭环和市场战略的深度布局,为自动驾驶行业的发展提供了重要借鉴。
特斯拉智能驾驶历史复盘
1.1 智能驾驶的起步:从模块化规则驱动到端到端算法
特斯拉智能驾驶的技术进化过程早在2014年就已开始。彼时,特斯拉与Mobileye合作,将其EyeQ3芯片引入智能驾驶系统,为其自动驾驶奠定了初步的基础。Mobileye基于规则的算法在单目相机下进行车距测量,通过图像中的物体像素高度和相机焦距估算距离,实现了早期车距监测的功能。然而,这一方法在路况变化、复杂障碍物识别上存在较大局限。例如,在2016年特斯拉发生的致命事故中,由于Mobileye的规则驱动系统无法识别拖挂白色货车与天空背景的差异,导致了致命误判 。这一事件凸显了规则驱动方法在高度不确定的驾驶环境中的局限性。传统的模块化方法在开发时依赖于人工定义的规则,因此在处理未见过的复杂路况时,系统的识别和判断能力会出现严重偏差。Mobileye提供的算法本质上是一个封闭的黑盒,难以灵活更新和改进;这也直接促使特斯拉在2017年转向自研端到端的感知系统,依托:Transformer+BEV + Occuopancy的主流架构,逐步实现了感知侧的全面进化。特斯拉意识到,如果智能驾驶技术要实现普及和安全保障,必须打破传统的规则驱动模式,实现以深度学习算法为核心的端到端控制系统,从而为系统提供更强的学习和泛化能力。
1.2 端到端算法的引入:感知侧的转型
端到端算法的核心在于用深度神经网络替代传统的模块化方法,实现从传感器输入到车辆控制的直接映射。2017年,特斯拉正式引入卷积神经网络(CNN)并开始构建以端到端算法为核心的智能驾驶感知系统。在此过程中,特斯拉聘请了在深度学习领域颇具影响力的Andrej Karpathy,并提出了“Software 2.0”的概念。与传统的由专家定义特征和规则的“Software 1.0”不同,“Software 2.0”强调用数据和神经网络自动提取特征,实现感知、决策和控制的自动化。Karpathy在加入特斯拉后,利用CNN模型设计了能够自主学习和理解环境特征的系统,推动智能驾驶从模块化设计转向了端到端结构。这一技术演进在特斯拉的智能驾驶系统中最为典型的应用就是BEV+Transformer架构。BEV技术提供了车辆周围环境的全局视角,将多个摄像头拍摄的2D图像合成为3D空间图像,从而帮助系统更准确地识别周围环境中的障碍物和行驶路线 。通过引入自注意力机制的Transformer模型,特斯拉的感知系统可以从局部像素特征提取中解放出来,基于全局数据进行更为高效的环境感知处理,大大提升了智能驾驶系统的准确性和稳定性。
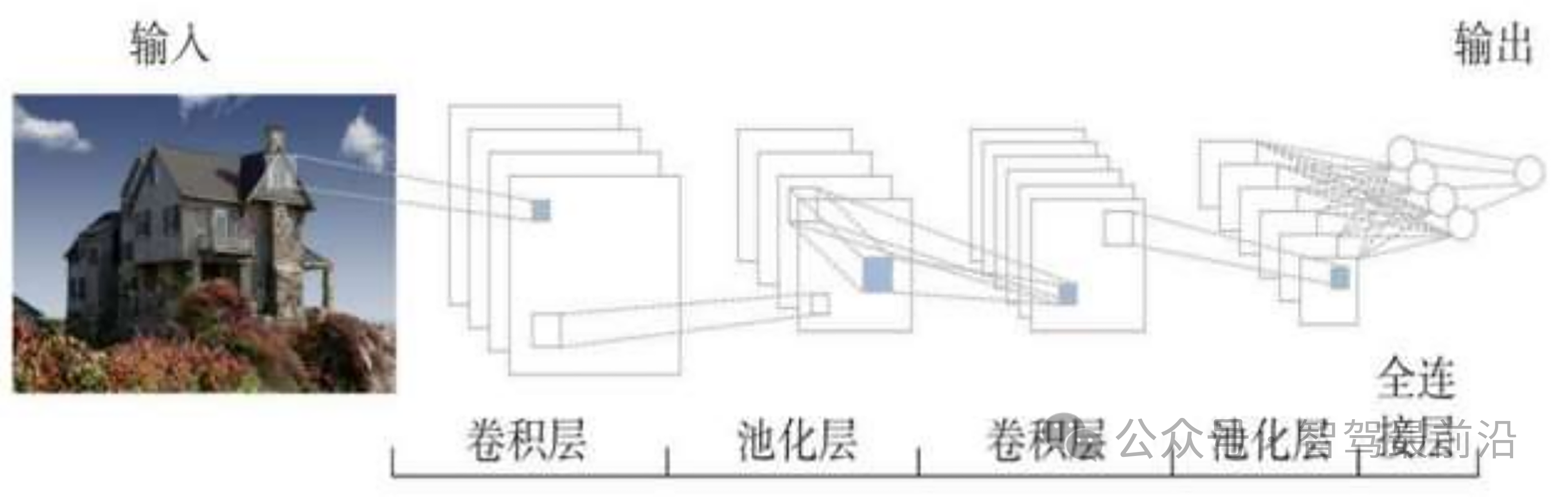
CNN工作过程示意图
1.3 感知侧端到端算法的实现:从BEV到Occupancy网络
BEV和Transformer的结合显著增强了特斯拉系统的环境感知能力。然而,智能驾驶环境的复杂性要求系统具备更高的适应性和泛化能力。特斯拉进一步提出Occupancy网络,将BEV从二维扩:数据闭环的关键提升在数据闭环的过程中,数据标注的准确性和高效性对算法性能至关重要。特斯拉从2019年开始逐步建设自有标注团队,将传统的2D人工标注拓展到4D自动标注系统。4D自动标注系统能够在空间和时间维度上对数据进行动态标注,涵盖深度、速度和加速度等信息,使系统能够更加精准地分析和理解驾驶环境。传统的人工标注不仅成本高、速度慢,还易受人为主观因素影响,而4D自动标注系统则能够大幅提升标注速度和一致性,使得大量数据能够快速投入训练,极大缩短了系统优化的周期。
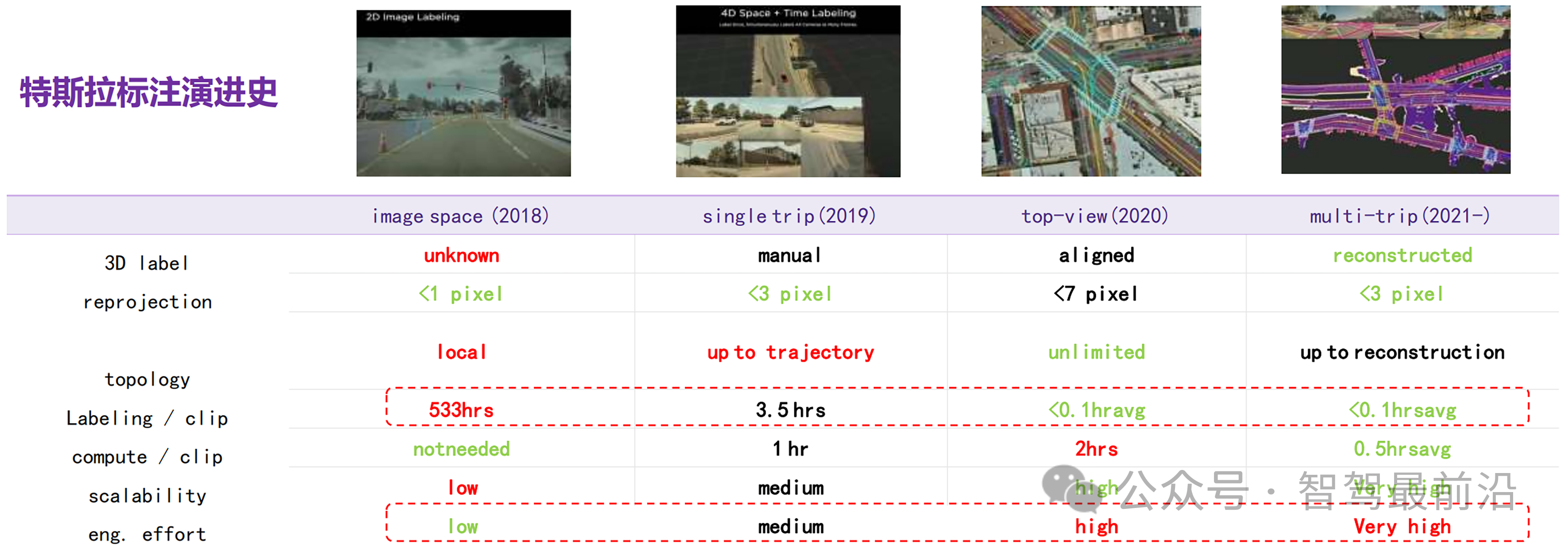
特斯拉标注演进史
特斯拉的4D自动标注系统能够替代近500万小时的人工标注作业量,通过计算机视觉和神经网络技术自动识别图像中的场景特征,并在标注数据时纠正细微错误,使得数据标注更加精确。由于自动标注系统的效率显著高于人工操作,特斯拉能够在更短的时间内获得更大规模的数据集,进一步提升系统的泛化能力。这种自动化数据标注技术也为特斯拉的数据闭环带来了质的飞跃,使其能够以更快的速度进行算法迭代,从而保持在行业中的技术领先地位。
1.4 自研Dojo算力中心:支撑闭环的核心硬件
在数据闭环的实现过程中,计算能力是支撑大规模数据处理和模型训练的基础。为此,特斯拉投入巨资自研了Dojo超级计算机,并在2021年推出D1芯片。Dojo不仅是一个算力中心,更是特斯拉数据驱动体系的核心支撑。与传统的GPU架构相比,Dojo系统以更高的性能和效率进行专门优化,特别是面向特斯拉的自动驾驶任务,Dojo能够在自动标注、占用网络等核心任务中实现比标准GPU高3-4倍的计算效率。
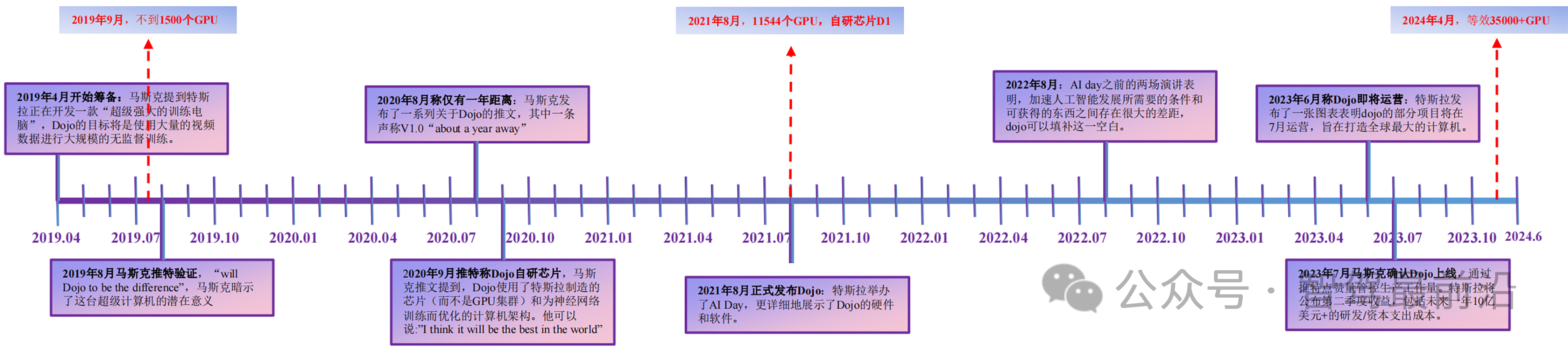
特斯拉Dojo历史进展梳理
Dojo的核心在于其高带宽和低延迟的训练体系。如每个D1芯片配有高达645mm²的晶体管集成面积,并拥有高达362 TFLOPS的算力,这使得特斯拉能够在短时间内完成大规模神经网络的训练。通过Dojo,特斯拉可以在更短的时间内完成数亿帧视频数据的训练和迭代,从而极大提升了数据闭环的整体效率。Dojo不仅是特斯拉数据闭环体系的计算支柱,更是其保持技术领先的关键要素之一。特斯拉在2024年预计将Dojo的算力扩展至100 Exa-FLOPS,这将使其在智能驾驶领域的算力储备远超同业,为未来的算法优化和大模型训练提供充足的算力保障 。
特斯拉智能驾驶未来研判框架
2.1 算法收敛:感知和规控侧的大模型趋势
特斯拉在感知侧的端到端算法和规控侧的端到端控制系统推动了智能驾驶算法的逐步收敛趋势。2021年特斯拉推出BEV+Transformer架构,2022年又将Occupancy网络引入感知系统。通过对数据的全局感知,Transformer架构为系统提供了强大的特征提取和环境理解能力,大幅提升了智能驾驶的环境识别准确度。在规控侧,通过神经网络结合蒙特卡罗树算法,特斯拉实现了对路径规划的端到端控制,使得系统在复杂环境中具备更高的决策效率。从当前的行业发展来看,智能驾驶算法正在逐步向大模型方向发展。随着计算资源的增加和数据规模的扩大,感知和规控侧的算法模型将逐步从规则驱动走向数据驱动的深度学习模式。大模型的优势在于可以通过跨领域的知识和数据融合,提高系统在不同场景中的识别和决策能力。大模型带来的性能跃升也促使特斯拉在硬件层面加大了Dojo的算力投入,以支撑其智能驾驶“GPT时刻”的到来,即通过规模化训练获得显著的性能提升。特斯拉的Dojo计算能力将在2024年实现进一步扩展,为大规模端到端智能驾驶模型提供支持,从而加速其自动驾驶系统的全面升级。
2.2 数据竞赛与闭环优化:未来的核心竞争力
数据是智能驾驶系统性能提升的关键。特斯拉通过庞大的车队积累和仿真模拟,构建了行业领先的数据闭环体系,为其智能驾驶系统提供了源源不断的高质量数据。在自动驾驶的未来竞争中,数据闭环的建设将成为车企的重要竞争力之一。特斯拉的闭环数据体系不仅包含实际路况数据,还涵盖了影子模式挖掘的长尾场景、仿真模拟的数据补充和自动标注的高效处理。未来的数据竞赛将聚焦于如何更快地获取和处理大量高质量数据。特斯拉通过推出FSD V12进一步提升了智能驾驶的渗透率,并以低价策略鼓励用户生成更多驾驶数据。此外,特斯拉还通过奖励积分等手段激励用户在不同驾驶场景中使用智能驾驶功能,从而为系统带来更多的训练数据。随着特斯拉总FSD行驶里程在2024年预计突破17亿英里,其数据闭环体系的优势将进一步凸显,使其在行业竞争中处于领先地位。
2.3 任务导向与分步端到端:智能驾驶的未来路径
随着智能驾驶技术的不断进步,任务导向和分步端到端将成为未来智能驾驶发展的重要趋势。在大模型的支撑下,智能驾驶系统能够根据特定任务定向优化系统性能,从而满足不同驾驶场景的需求。特斯拉在2023年推出的端到端智能驾驶任务分步模块,将其智能驾驶功能细化到停车、泊车和路径规划等不同任务中,并通过分步迭代的方式持续优化。

智能驾驶端到端设计理念
例如,在智能泊车场景中,特斯拉基于端到端大模型,通过统一的感知、决策和控制体系,将泊车过程中的感知、路径规划和停车控制多合一,实现对车位的精准定位和自动泊车操作。小米在其代客泊车场景中也采用了类似的端到端模型,这一模式通过大规模学习和推演,不断提升泊车准确度和操作流畅性。通过任务导向的细分,特斯拉不仅可以进一步提升用户体验,还能够在不同场景下提供更高效的解决方案。
特斯拉视角的市场应用与未来战略
3.1 智能驾驶的市场化挑战:法规与成本
尽管特斯拉在智能驾驶技术上取得了显著进展,但在实际市场推广中依然面临法规和成本的多重挑战。首先,智能驾驶的广泛应用要求法律体系的配套完善。目前各国在智能驾驶的安全标准、事故归责、数据隐私等方面尚未形成统一标准,特斯拉在全球范围内的推广因此受到限制。尤其在中国市场,特斯拉需要满足数据合规和本地化要求,为此投入了大量资源以确保FSD系统的顺利落地。此外,智能驾驶系统的高成本也是制约市场化推广的一个因素。特斯拉通过FSD芯片自研降低了硬件成本,但系统的整体成本仍然较高。特斯拉采用了“订阅+买断”相结合的模式,使得更多消费者能够以较低的成本体验到智能驾驶功能。通过逐步降低FSD的订阅和买断价格,特斯拉有效提升了市场渗透率。随着硬件成本的进一步下降,特斯拉的智能驾驶系统将逐步扩展到更多的车型中,推动智能驾驶的普及。
3.2 技术展望:从软件定义汽车到数据驱动汽车
随着智能驾驶系统的日益成熟,汽车正从传统的硬件产品转向数据驱动的智能产品。特斯拉的智能驾驶系统以数据为核心,以自研计算平台Dojo为支撑,使其具备了高效的数据闭环迭代能力。未来,智能驾驶技术的发展将进一步加速汽车从“软件定义”到“数据驱动”的转变。特斯拉通过大规模的数据积累和自主研发,正在推动这一变革,并已率先进入智能驾驶的深水区。在这一趋势下,数据隐私和安全将成为未来发展的关键问题。特斯拉在实现智能驾驶系统的全球扩展过程中,需要在保证数据合规和隐私保护的前提下进行数据处理和跨境传输。为此,特斯拉不断加强数据安全措施,以应对复杂的数据监管环境。未来随着数据驱动汽车的普及,如何在合规的前提下高效利用数据将成为每个车企面临的共同挑战。
结论
特斯拉智能驾驶系统的发展路径显示了自动驾驶技术的核心趋势,即从模块化走向端到端,从规则驱动转向数据驱动。通过对算法、数据和硬件的综合布局,特斯拉在智能驾驶领域取得了显著突破。未来,随着智能驾驶技术的进一步成熟和数据闭环的完善,智能驾驶的普及将成为大势所趋。然而,法规的完善、成本的下降和数据隐私保护将是智能驾驶广泛应用的关键所在。特斯拉在智能驾驶上的成功经验为行业提供了宝贵的参考。随着技术的不断发展,自动驾驶市场竞争将更加激烈,数据驱动的闭环体系和高效计算平台将成为车企在未来竞争中的重要武器。在未来的智能驾驶市场中,特斯拉的技术创新和战略布局将继续引领行业的发展方向。
审核编辑 黄宇
-
特斯拉
+关注
关注
66文章
6310浏览量
126533 -
智能驾驶
+关注
关注
3文章
2501浏览量
48727
发布评论请先 登录
相关推荐
特斯拉智能驾驶|从视觉优先的技术路径到未来的挑战?
从发展智能电网面临的问题看智能电表环境
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?
自动驾驶真的会来吗?
讯 > 特斯拉或将采用无线热点及动态环视设备 特斯拉或将采用无线热点及动态环视设备
浅析自动驾驶发展趋势,激光雷达是未来?
无人驾驶与自动驾驶的差别性
ADAS的发展给驾驶员驾驶视野的改变
特斯拉FSD,从全栈自研到智能驾驶的未来






 工商网监
工商网监
评论