 AGV转运机器人需求快速增长,如何进行障碍物检测确保安全?
AGV转运机器人需求快速增长,如何进行障碍物检测确保安全?
AGV转运机器人在复杂工厂环境中进行自动搬运作业时,安全要求包括具备高效的障碍物识别能力、实时反应能力和保持安全距离。此外,AGV应具有人机交互系统以警示周围人员,确保稳定可靠的运行,并定期进行维护和检测,以应对突发情况,保障整体安全性。

移动机器人的识别障碍物的原理
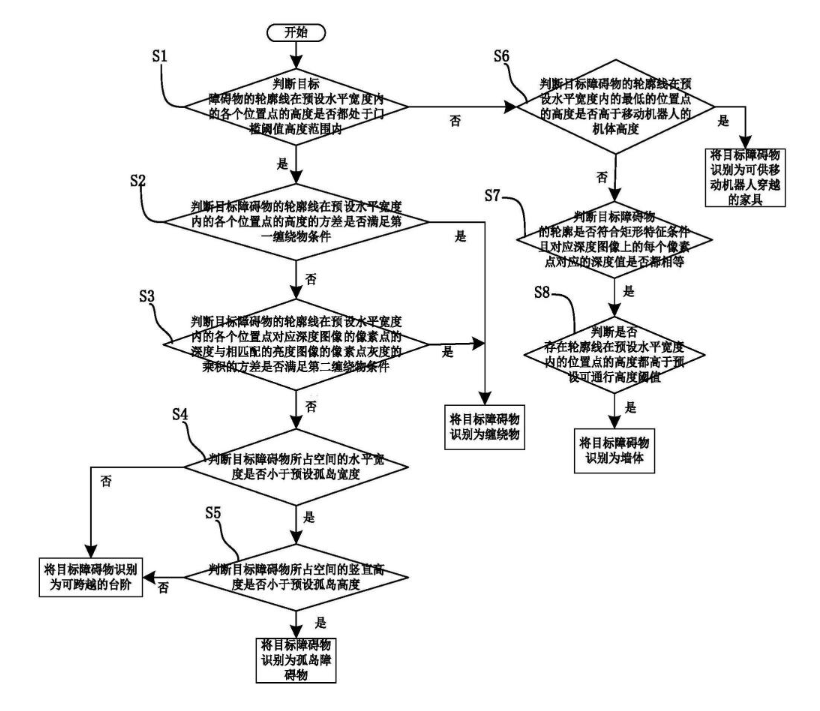
AGV小车的障碍物识别主要依赖多种传感器技术,如激光雷达、超声波传感器和摄像头等。激光雷达通过发射激光束并测量反射信号的时间来创建周围环境的高精度三维地图,从而识别障碍物的位置和形状。超声波传感器则通过声波反射来检测近距离障碍物,而摄像头结合计算机视觉技术,分析图像数据以识别标志和动态物体。通过将这些传感器的数据进行融合,AGV能够实时监测环境变化,迅速作出反应,确保安全行驶。
激光雷达导航通过发射激光束并测量返回时间,实时构建周围环境的高精度地图。AGV移动机器人利用这些数据识别障碍物的位置和形状,从而计算出最佳的行驶路径。结合路径规划算法,机器人能够动态调整路线,避免碰撞,实现自主避障。这种技术使AGV在复杂环境中灵活安全地移动。
富唯智能移动机器人通过激光雷达导航算法,实现自动路径规划,无需轨道、磁条等。当路径中有障碍物时,会重新规划路径避开障碍物。
富唯的移动机器人还有具有许多的优点,其高精度导航系统确保对接精度可达±5mm,使原料转运更为准确,减少了物料浪费和错误。高达1m/s的移动速度使得平均2-3分钟内完成和面机原料桶的转运与安装,大幅提升了工作效率,缩短了生产周期。自研的高精度对接机构增强了与和面机的连接稳定性,降低了故障风险。此外,“零”代码编程和智能调度系统使得机器人部署简单快捷,减少了培训和操作的复杂性,进一步提升了整体生产效率。
转运机器人在工业中的应用前景非常广阔。富唯可根据客户不同的要求针对性提供相应的解决方案。随着技术的进步和成本的降低,转运机器人的普及将促进工业4.0的实现,使得工厂在面对市场需求变化时更加灵活应对。未来,转运机器人不仅将提升生产效率,还将推动整个工业生态系统向智能化、数字化方向发展。
审核编辑 黄宇
-
机器人
+关注
关注
211文章
28366浏览量
206887 -
AGV
+关注
关注
27文章
1299浏览量
41062
发布评论请先 登录
相关推荐
转运机器人价格市场分析

agv搬运机器人是怎么实现无人搬运的?

基于RK3588的割草机器人应用解决方案



在NVIDIA Isaac Lab中训练四足机器人运动

AGV搬运机器人:智能物流的得力助手
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
人工 VS AGV无人搬运机器人,AGV赋能中国智能制造

AI陪伴机器人市场需求快速增长,情感交互成重要布局方向
珠海一微半导体,TOF摄像头障碍物识别清洁机研发





 工商网监
工商网监
评论