 恩智浦FRDM-MCXA153 RT-Thread实践指南 实现和优化RT-Thread的SPI驱动
恩智浦FRDM-MCXA153 RT-Thread实践指南 实现和优化RT-Thread的SPI驱动

串行外设接口(SPI)是一种广泛使用的同步串行通信接口,在嵌入式系统中扮演着重要角色。本文将深入探讨如何在NXP MCXA153 MCU上实现和优化RT-Thread的SPI驱动,同时介绍NXP提供的相关开发工具和技术。
SPI简介
SPI由摩托罗拉公司开发,是一种全双工同步串行总线,主要由四个信号线组成:
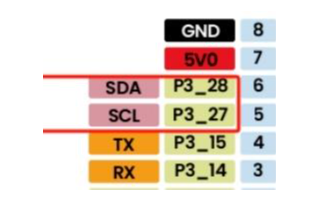
CS (Chip Select):片选信号
SCLK (Serial Clock):时钟信号
MOSI (Master Out Slave In):主设备输出,从设备输入
MISO (Master In Slave Out):主设备输入,从设备输出
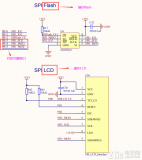
SPI广泛应用于连接各种外设,如TFT LCD显示器、QSPI Flash存储器、实时时钟模块和惯性测量单元(IMU)等。
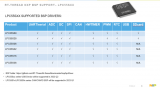
NXP MCXA153 SPI特性
NXP MCXA153 MCU集成了两个低功耗SPI (LPSPI)模块,具有以下特点:
支持主/从模式
可配置的时钟极性和相位
8位到32位可编程数据帧大小
硬件片选信号控制
支持DMA传输
最高传输速率可达48Mbps
RT-Thread SPI驱动移植流程
现在,让我们详细介绍如何将RT-Thread的SPI驱动移植到MCXA153上。
以SPI0为例:
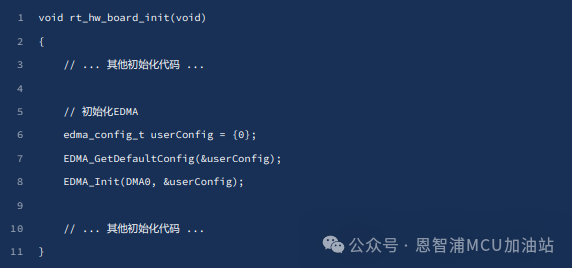
3.1 硬件初始化 首先,我们需要在board初始化代码中配置SPI0相关的硬件: 1). 在 rt_hw_board_init 函数中添加以下代码:
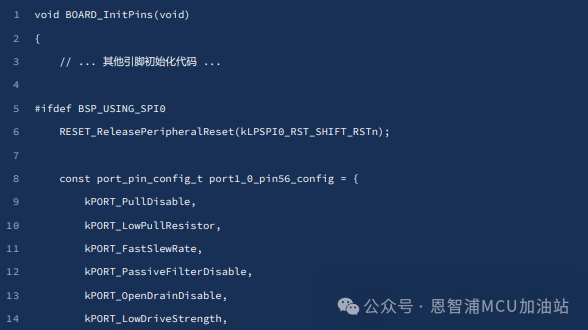
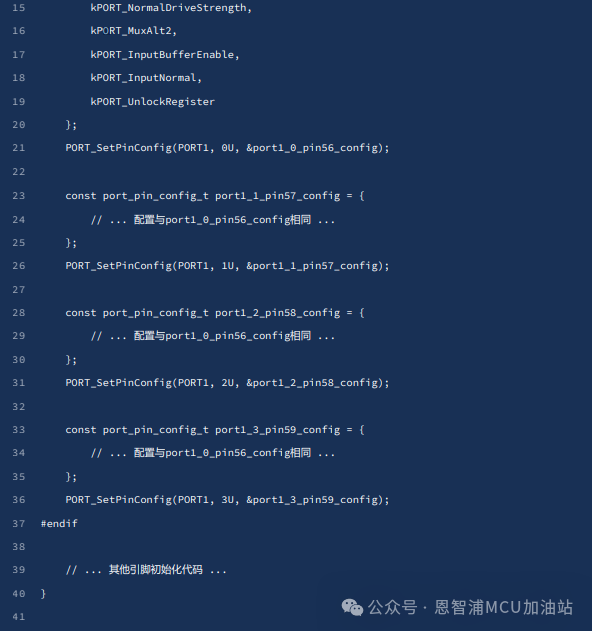
2). 在 BOARD_InitPins 函数中添加以下代码:
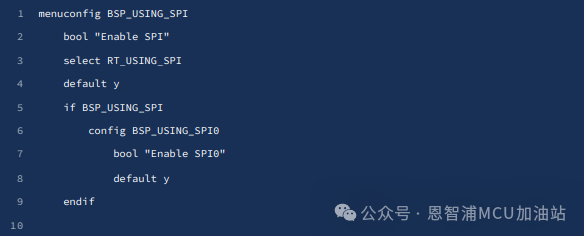
3.2 Kconfig配置
在 board/Kconfig 文件中添加:
3.3 驱动实现
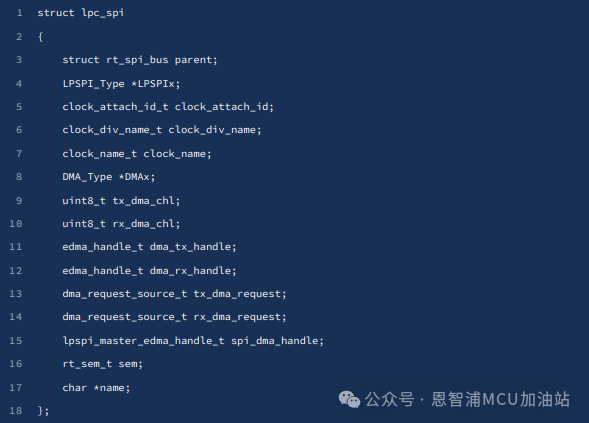
在 drv_spi.c 中实现SPI驱动的核心功能: 1). 定义SPI设备结构体:
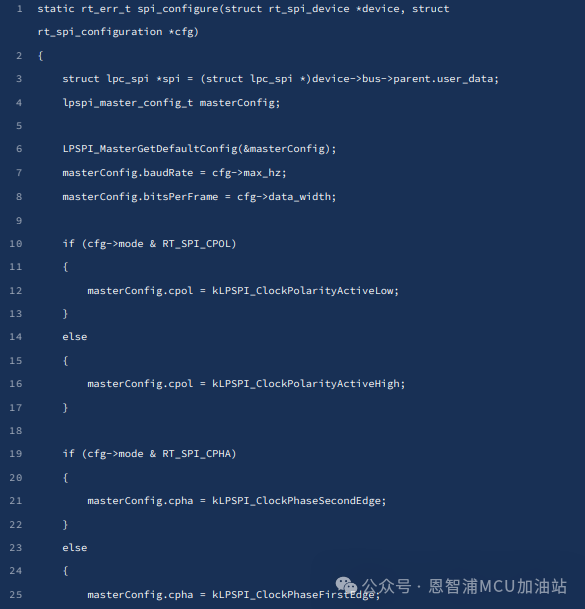
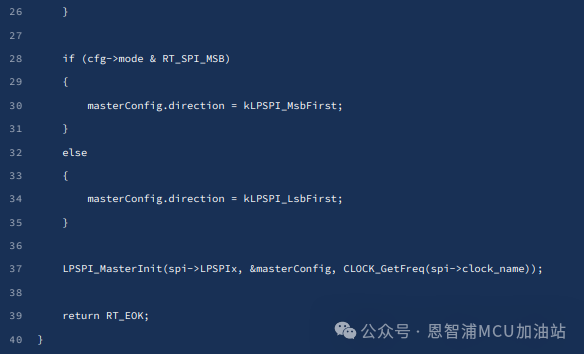
2). 实现SPI配置函数:
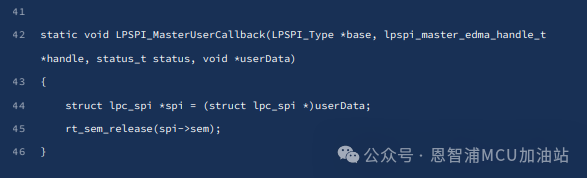
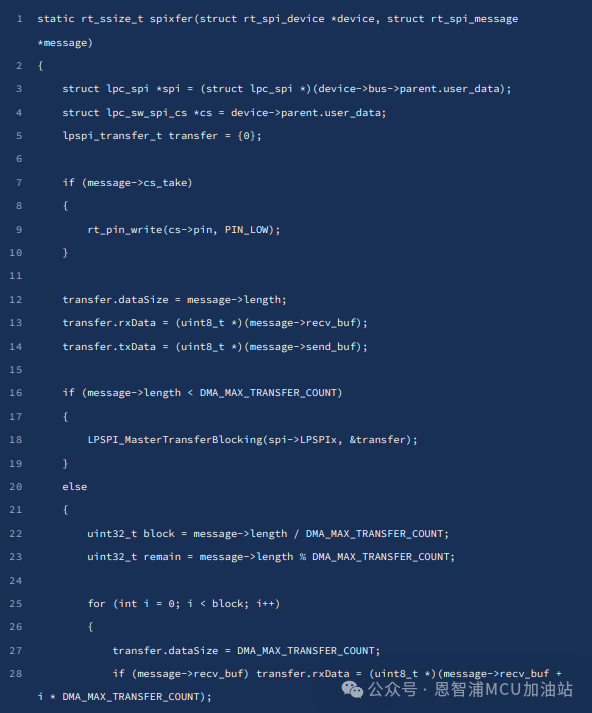
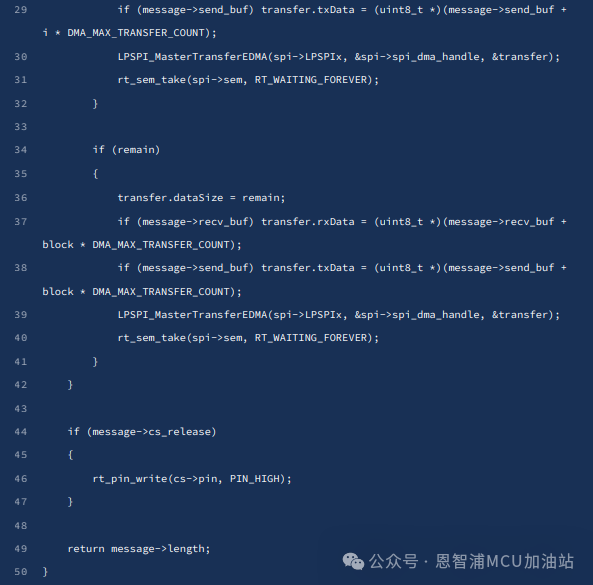
3). 实现数据传输函数:
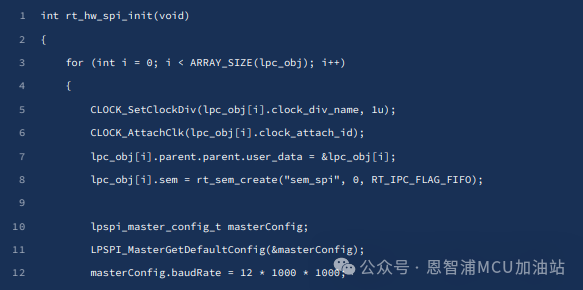
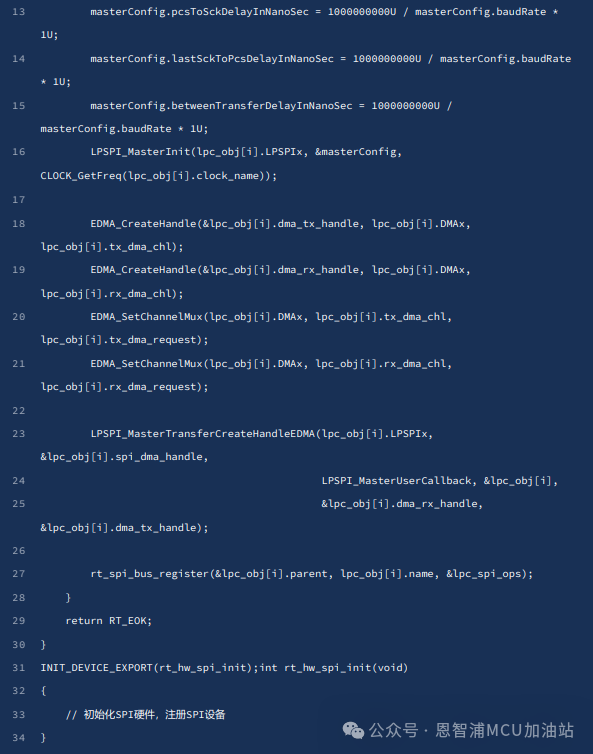
4). 实现SPI初始化函数:
3.4 添加依赖文件 在 Libraries/MCXA153/SConscript 文件中添加:

测试与验证
为了验证SPI驱动的正确性,我们可以进行一个简单的回环测试:
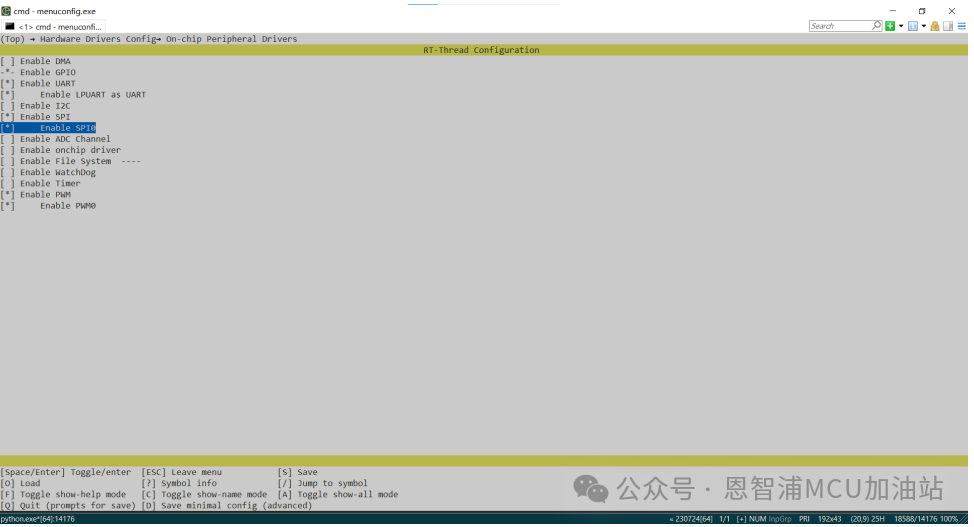
打开menuconfig使能spi0驱动
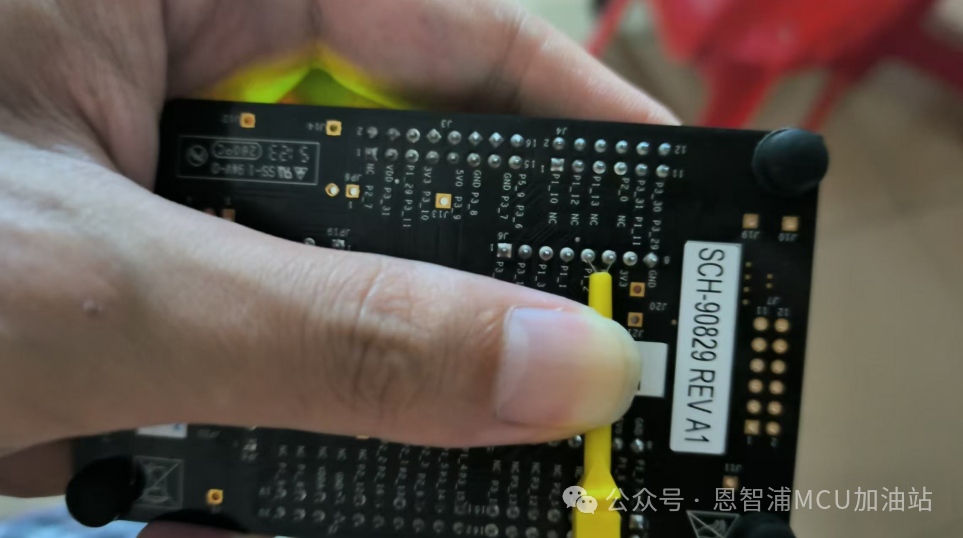
短接MISO和MOSI引脚(P1_0和P1_2)进行自发自收测试 , 将MOSI (P1_0) 和 MISO (P1_2) 引脚短接:
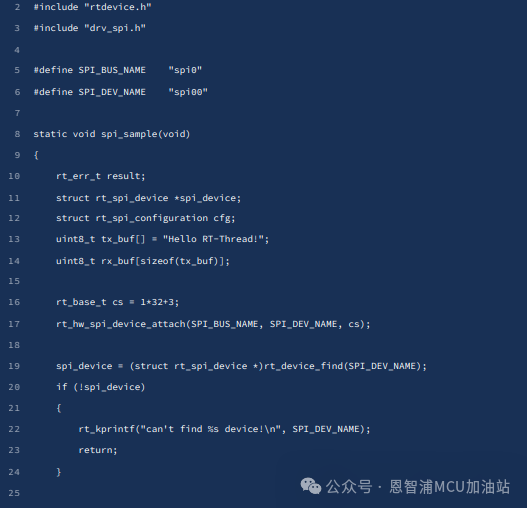
使用以下测试代码:

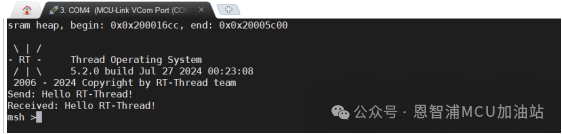
运行结果:
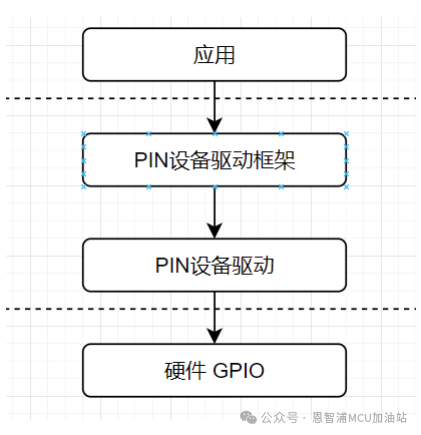
结论 通过本文,我们详细介绍了如何在NXP MCXA153 MCU上实现和优化RT-Thread的SPI驱动。RT-Thread的设备驱动框架提供了良好的抽象,使得SPI驱动的移植变得相对简单。同时,通过利用MCXA153的硬件特性,如DMA和硬件CS控制,我们可以实现高效的SPI通信。
在实际应用中,开发者应根据具体需求选择合适的配置和优化策略。同时,充分利用NXP提供的工具和文档资源,可以大大加速开发进程并提高代码质量。
参考资料
1. RT-Thread官方文档:
https://www.rt-thread.org/document/site/
2. NXP MCXA153参考手册
3. MCUXpresso SDK文档:
https://mcuxpresso.nxp.com/
我们鼓励开发者在实践中不断探索和优化,充分发挥MCXA153和RT-Thread的潜力!
-
mcu
+关注
关注
147文章
19126浏览量
403755 -
恩智浦
+关注
关注
14文章
6122浏览量
154005 -
SPI
+关注
关注
17文章
1900浏览量
102118 -
RT-Thread
+关注
关注
32文章
1638浏览量
45204
原文标题:恩智浦FRDM-MCXA153 RT-Thread实践指南5-SPI
文章出处:【微信号:NXP_SMART_HARDWARE,微信公众号:恩智浦MCU加油站】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
恩智浦FRDM-MCXA153 RT-Thread开发实战(六):I2C总线开发与应用
基于RT-Thread的SPI通讯
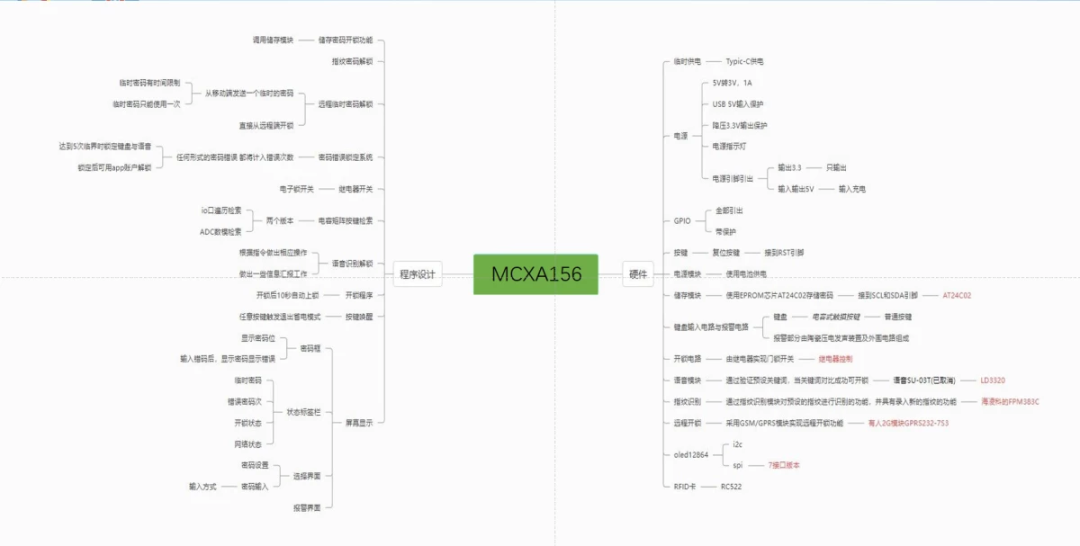
智能门锁:基于RT-Thread与FRDM-MCXA156的多外设嵌入式实践 | 技术集结
RT-Thread编程指南
RT-Thread上SPI的细节内容
RT-Thread文档_RT-Thread 潘多拉 STM32L475 上手指南

恩智浦半导体正式加入RT-Thread全球合作伙伴计划!
RT-Thread成为恩智浦注册合作伙伴,共同赋能工业与物联网应用开发!
【上海】5月25日-基于恩智浦MCX N系列MCU结合RT-Thread的应用与实践 线下培训

基于恩智浦FRDM-MCXA153开发板实现RT-Thread的GPIO驱动
基于恩智浦FRDM-MCXA153开发板实现RT-Thread的ADC驱动
免费申请 | FRDM-MCXA156评测活动发布!



评论