 PID控制中的反馈机制解析
PID控制中的反馈机制解析
在现代工业自动化和过程控制中,PID控制器是最为常见和有效的控制策略之一。它通过比例(P)、积分(I)和微分(D)三个基本控制作用的组合,实现了对系统动态特性的有效控制。
一、PID控制的基本概念
PID控制器的名称来源于其三个核心控制参数:比例(Proportional)、积分(Integral)和微分(Derivative)。这三个参数共同作用于控制器的输出,以减少系统输出与设定值(参考值)之间的偏差。
- 比例(P)控制 :比例控制是PID控制的基础,它根据当前偏差的大小来调整控制量。比例增益(Kp)是比例控制的核心参数,它决定了偏差对控制输出的影响程度。
- 积分(I)控制 :积分控制作用于偏差的累积,它能够消除稳态误差,使系统输出最终能够达到设定值。积分增益(Ki)决定了积分项对控制输出的贡献。
- 微分(D)控制 :微分控制预测偏差的变化趋势,通过提前调整控制量来减少系统的超调和振荡。微分增益(Kd)控制微分项对控制输出的影响。
二、PID控制的反馈机制
PID控制的反馈机制是其核心,它确保了系统的稳定性和响应速度。反馈机制包括以下几个步骤:
- 偏差计算 :系统的实际输出与设定值之间的差异称为偏差。偏差是PID控制器工作的基础,控制器根据偏差的大小和变化趋势来调整控制量。
- 比例作用 :比例控制根据当前偏差的大小来调整控制量。比例作用是即时的,它能够快速响应偏差,但单独使用时可能会导致系统不稳定。
- 积分作用 :积分控制作用于偏差的累积,它能够消除稳态误差。积分项的累加效应使得控制器能够持续调整控制量,直到偏差消除。
- 微分作用 :微分控制预测偏差的变化趋势,通过提前调整控制量来减少系统的超调和振荡。微分项能够提高系统的响应速度和稳定性。
- 控制量调整 :PID控制器将比例、积分和微分三个作用的输出相加,得到最终的控制量。这个控制量被用来调整系统的输入,以减少偏差。
三、PID控制的参数调整
PID控制器的性能很大程度上取决于其参数的调整。参数调整是一个试错的过程,需要根据系统的动态特性和控制目标来确定。
- 比例增益(Kp) :比例增益决定了控制器对偏差的敏感度。增益过高可能导致系统超调和振荡,过低则可能导致响应速度慢和稳态误差。
- 积分增益(Ki) :积分增益决定了控制器消除稳态误差的能力。增益过高可能导致系统响应过慢,过低则可能导致稳态误差无法消除。
- 微分增益(Kd) :微分增益决定了控制器预测偏差变化趋势的能力。增益过高可能导致系统对噪声敏感,过低则可能无法有效减少超调和振荡。
四、PID控制的应用
PID控制因其简单、高效和鲁棒性而被广泛应用于各种工业和过程控制领域。
- 温度控制 :在化工、食品加工等行业中,PID控制器被用来精确控制温度,以保证产品质量和生产安全。
- 流量控制 :在水处理、石油化工等领域,PID控制器用于控制流体的流量,以满足生产需求。
- 压力控制 :在气体输送、压缩机控制等场合,PID控制器能够维持恒定的压力,保证系统的稳定运行。
- 位置控制 :在机械臂、输送带等自动化设备中,PID控制器用于精确控制位置,提高生产效率。
五、PID控制的局限性与改进
尽管PID控制具有广泛的应用,但它也有一些局限性,如对复杂系统的适应性差、参数调整困难等。为了克服这些局限性,研究者们提出了多种改进方法:
- 自适应PID控制 :通过在线调整PID参数,使控制器能够适应系统参数的变化。
- 模糊PID控制 :结合模糊逻辑,提高控制器对不确定性和非线性系统的处理能力。
- 神经网络PID控制 :利用神经网络的学习能力,实现对复杂系统的自适应控制。
六、结论
PID控制作为一种经典的反馈控制策略,其反馈机制是确保系统稳定运行的关键。通过合理调整PID参数,可以有效地控制各种工业过程。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
参数
+关注
关注
11文章
1838浏览量
32236 -
PID控制
+关注
关注
10文章
460浏览量
40102 -
工业自动化
+关注
关注
17文章
2400浏览量
67249
发布评论请先 登录
相关推荐
初步解析飞思卡尔控制电机PID算法代码
分享一篇在其他地方看的分享的飞思卡尔控制电机PID算法代码解析的,写得非常的好。PID实指“比例proportional”、“积分integral”、“微分derivative” ,
发表于 11-04 11:59
PID算法有点不懂,,反馈的控制量这么用正确吗?
问题!!!---------------------------------------下面是一些关键性的代码附件有源程序这是PID算法部分PID处理后的控制量反馈到rout处,在这里
发表于 08-04 17:26
PID控制中如何整定PID参数
可以得到各种输出响应特性,也就是说,通过适当给定PID参数,大多数的控制任务都可以由PID完成。本文根据经典PID控制理论,结合玖阳自动化科
发表于 06-01 10:28
•67次下载
深度解析Asp.Net2.0中的Callback机制
深度解析Asp.Net2.0中的Callback机制(ups电源技术维修)-该文档为深度解析Asp.Net2.0中的Callback
发表于 09-27 16:28
•1次下载

PID控制器的含义
器。 PID控制,当今的闭环自动控制技术都是基于反馈的概念以减少不确定性。反馈理论的要素包括三个部分包括测量、比较和执行。测量关键的是被控变
发表于 03-09 14:22
•3796次阅读
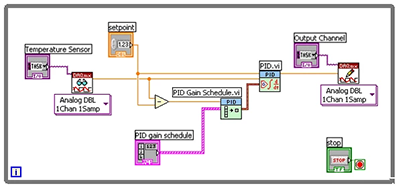
LabVIEW中PID控制的的高级功能
发展到控制具有复杂动力学的系统。在现实世界中,所有系统都具有非线性组件,因此在使用PID等经典反馈控制时存在一些挑战。借助增益调度和级联





 工商网监
工商网监
评论