 传感器融合如何赋能自主移动机器人
传感器融合如何赋能自主移动机器人
自主移动机器人(AMR)可帮助制造商提高生产效率、增强安全性并节省大量成本,因而在各行各业得到广泛应用。2022年全球AMR市场规模为86.5亿美元,预计2022年至2028年间的复合年增长率(CAGR)将达到18.3%。
进入工业5.0时代,人类将与人工智能(AI)机器人协同工作,机器人辅助而非取代人类。愿景固然美好,但要实现这一目标,AMR必须克服重重挑战,集成各种传感器以及新兴的传感器融合技术将为此提供助益。
AMR采用过程中所面临的挑战
AMR普及的一大难题是其在多种不同应用和环境中的适应性。AMR已广泛应用于仓库、农业技术、商业园林绿化、医疗保健、智能零售、安防和监控、配送、库存管理、拣选和分类等多个领域。在这些不同的环境中,AMR需要安全地与人类共处。
此外,复杂的情境也极大地增加了AMR的工作难度。有些情况人类可以轻松应对,但对AMR而言却并非易事。例如,假设送货机器人在配送最后一个包裹的途中看到路中间有个球,它可能会成功识别这一障碍物并避免碰撞。但其智能化程度是否足以预判会有小孩跑出来捡球呢?类似这样的复杂情境还有很多:AMR能否利用安装在柱子上的90度反光镜观察弯道的交通状况并做出预测?AMR是否知道自己不能在新浇筑的混凝土上行走?
人类很容易作出判断,但机器人却难以应对。然而,若配备了合适的传感器,AMR在强日光下检测物体的能力可以超越人类。不过,浇筑的混凝土和喷洒的液体仍然比较难以识别。边缘、悬崖、坡道和楼梯对于AMR来说都是挑战。还有一些特殊情况,比如有人故意搞破坏,将AMR推翻,这也是早期开发逃逸机动系统的缘由。
要想解决这些挑战,需要在AI技术中采用先进的大型语言模型(LLM)和各类高性能传感器。
用于AMR的高性能传感器
AMR需要使用不同类型的传感器进行同步定位与地图构建(SLAM),并提供距离和深度测量。传感器的重要指标包括物体检测、物体识别、颜色识别、分辨率、功耗、尺寸、成本、范围、动态范围、速度以及在各种光照和天气条件下的适应性。
可用于AMR的传感器模式包括:
CMOS 成像
直接飞行时间(dToF)和间接飞行时间(iTOF)深度感知
超声波
雷达
电感定位
低功耗蓝牙(Bluetooth LE) 技术
惯性
上述模式各有其优缺点。例如,雷达能在弱光或恶劣天气条件下有效测量范围和速度,但颜色检测能力较差,初始成本高,且体积较大,而这在AMR设计中是一个重要考虑因素。激光雷达采用大批量CMOS硅铸造工艺,因此初始成本相对较低,且能够在夜间/直射阳光下进行检测,但在物体分类方面表现欠佳。同样,iToF深度传感器具有出色的分辨率和低功耗处理能力。
显然,要为AMR提供全面的信息以应对上述挑战,仅靠单一的传感器模式无法满足需求。根据应用和环境的不同,AMR需要使用多种传感器模式。这些传感器不会单独运行,而是通过“传感器融合”共同发挥作用。
传感器融合如何赋能自主移动机器人
传感器融合是指将两个或多个数据源(来自传感器和/或算法或模型)组合,以更好地了解系统及其周围环境。AMR中的传感器融合不仅可以提升可靠性、冗余度并最终确保安全性,还可以提高评估的一致性、准确性和可信度,是一项必不可少的技术。
如下图1所示,传感器融合结合了数据收集和数据解释两个功能。
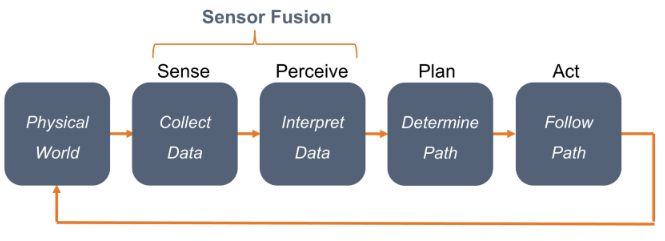
图1:传感器融合过程
在传感器融合中,“解释数据”的步骤需要实现算法或模型。有时传感器融合的结果直接为人类提供有用信息(如倒车辅助),有时则供机器作进一步处理(如安防系统中的人脸识别)。
传感器融合具有多种优势,例如降低信号噪声。同质传感器融合可以降低非相关噪声,而异构传感器融合可以降低相关噪声。
传感器融合本质上可通过冗余来提高可靠性。传感器的数量至少有两个,这意味着即使其中一个传感器的数据丢失,虽然数据质量降低,但系统仍可利用其他传感器提供的数据继续工作。传感器融合还可用于预估无法直接测量的状态,如遮挡(当摄像头无法观察到物体或物体的一部分时)和反射(当物体或表面将光线从一个摄像头反射到另一个摄像头时)。
鉴于以上优势,且随着采用率日益增长,传感器融合领域已呈现以下趋势:
采用AI驱动的算法
增强物体检测和分类能力
传感器融合用于实现协同感知
多种传感器模式
恶劣条件下的环境感知
传感器融合用于实现360度环视
实时传感器校准
传感器融合的核心在于传感器本身,如果获取的数据不理想,再好的算法也无法生成高质量的结果。令人欣喜的是,安森美(onsemi)提供了一系列出色的传感器和工具,支持将传感器融合技术用于AMR中。
总结
自主移动机器人应用场景多样,采用率加快提高。为顺应趋势,行业已形成了相关的最佳实践。首先,对环境实施控制,以减少AMR可能遇到的潜在碰撞情形。例如,可以在制造设施或仓库中为AMR/自动引导车辆(AGV)设定专门的路线。其次,在开发过程中使用数字孪生仿真实际使用场景(包括边界工况)。最后,将传感器融合与智能传感器、算法和模型相结合。
在智能感知技术领域,安森美一直走在前列。安森美提供各类卷帘快门和全局快门图像传感器,具有优异的动态范围性能,并配备运动唤醒等创新功能。除图像传感器外,安森美还提供用于距离检测的SiPM(激光雷达)。该产品组合包括超声波传感器、电感传感器和采用低功耗蓝牙技术的微控制器,后者支持可用于定位的AoA(到达角)和AoD(出发角)。
AMR中的传感器融合必将对工业和运输应用迈向工业5.0的进程产生重大影响,安森美致力于提供完备的传感器和子系统,确保一切顺利过渡。进一步了解我们的AMR方案和系统方案指南。
-
传感器
+关注
关注
2552文章
51383浏览量
756431 -
安森美
+关注
关注
32文章
1703浏览量
92152 -
导航
+关注
关注
7文章
533浏览量
42542 -
自主移动机器人
+关注
关注
2文章
44浏览量
11611
原文标题:传感器融合技术如何助力自主移动机器人导航再升级?
文章出处:【微信号:onsemi-china,微信公众号:安森美】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论