 “亦”真“亦”假?——MXsteerWheel与DYNA4的强强联手
“亦”真“亦”假?——MXsteerWheel与DYNA4的强强联手
作者 |Jo
小编 | 不吃猪头肉
高性能力反馈方向盘MXsteerWheel作为线控转向开发的新帮手,在北汇信息的展台上一直是大家关注的焦点。由于它简练出众的外表与真实阻尼的手感,吸引参展的朋友都乐此不疲地进行尝试。而后又不禁感叹,亦真亦假!

图1 桌面式驾驶模拟器

系统组成
整体来看,驾驶模拟器由CANoe测试平台、高性能实时机、方向盘电机与控制中枢,三者构成测试闭环。不过,在系统中,有位“扫地僧”在暗自发力,它就是虚拟车辆仿真软件(含转向模型)。其不仅为方向盘提供实时动力学响应,还让驾驶员可通过动画来观测车辆行径。真实的手感体验,离不开它,让我们一探究竟。
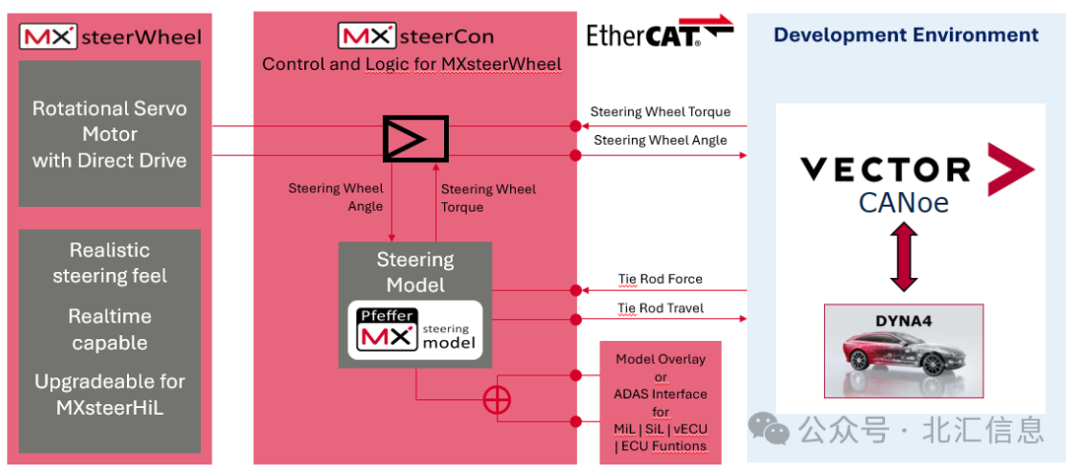
图2 系统交互概念

MdynamiX转向模型
MXsteerWheel采集的驾驶员方向盘角度传输给控制中枢MXsteerCon,其中包含了由Pfeffer教授团队开发的转向模型MXsteering Model。该模型为实时的三自由度模型,常用于EPS和HPS的转向手感仿真和分析,并支持集成ADAS接口,或自定义ECU功能,如反馈手感算法和车道保持功能。
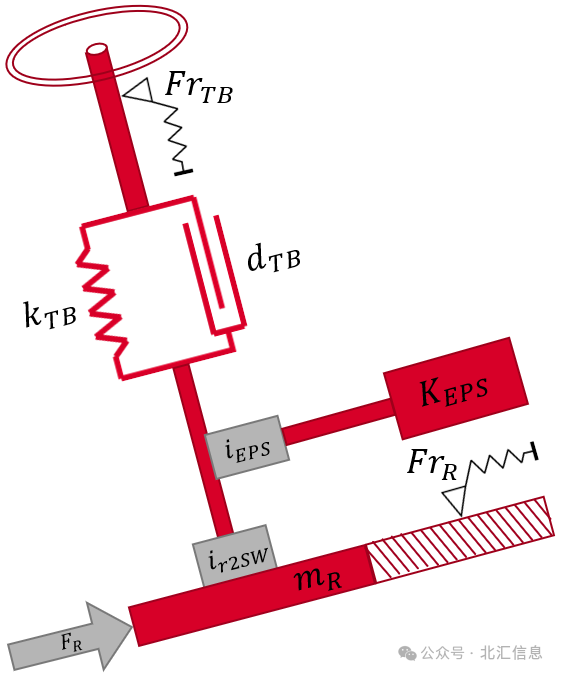
图3 MXsteering模型
在与DYNA4的集成中,该模型根据转向角度计算出齿条位移,通过EtherCAT通信协议传输给CANoe,在CANoe中以系统变量的形式再发送给DYNA4中。由于DYNA4与CANoe的集成高度简洁,只需要在DYNA4中关联上相应的系统变量,一键编译后生成虚拟节点挂载在CANoe中,模型数据便能低时延传输,保证实时性。
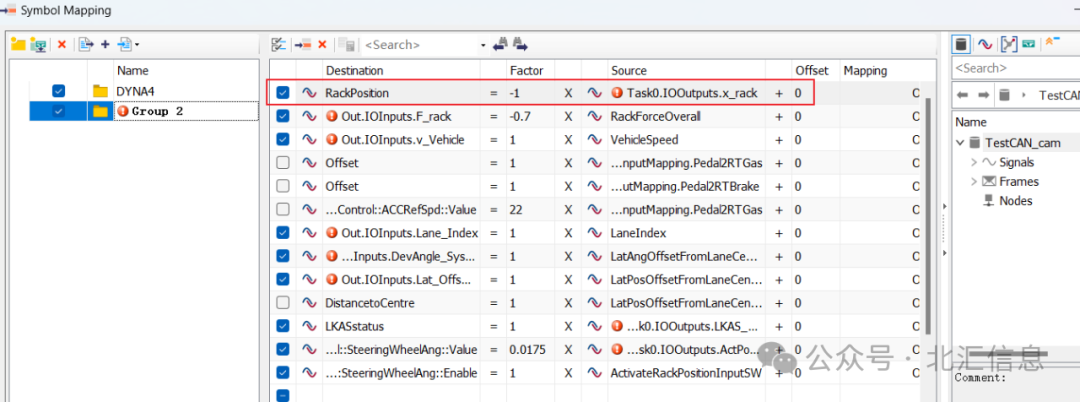
图4 系统变量关联
DYNA4也自带转向模型,包括转向柱和带有静摩擦模型的转向传统装置,支持齿轮齿条式和摇臂拉杆式两种不同的机械结构形式,前者常用于乘用车,后期应用于商用车和卡车。
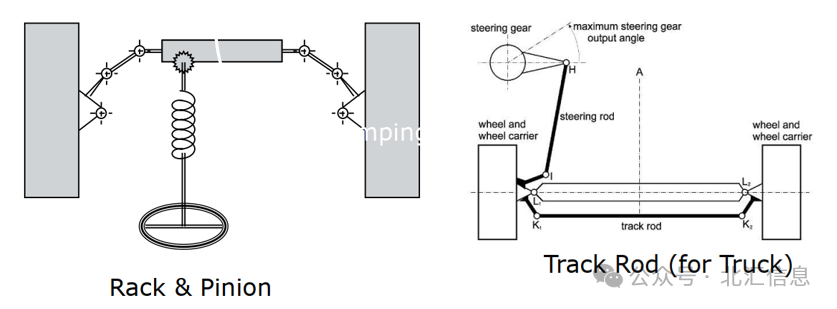
图5 DYNA4中转向模型类型

DYNA4车辆动力学模型
DYNA4将接收到的齿条位移再传输到自身的多体动力学底盘中,底盘模型结合道路环境、轮胎、动力传动等综合信号,计算出最终作用在传动轴上的负载力,并将此值再回传给手感方向盘。简易的信号交互形式,让工程师非常方便地获取诸如车身姿态等信息,来进行例如主动回正功能的测试。
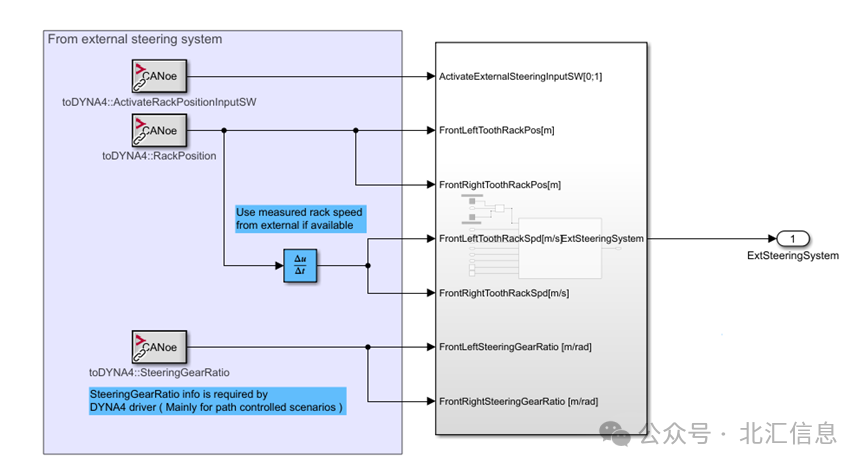
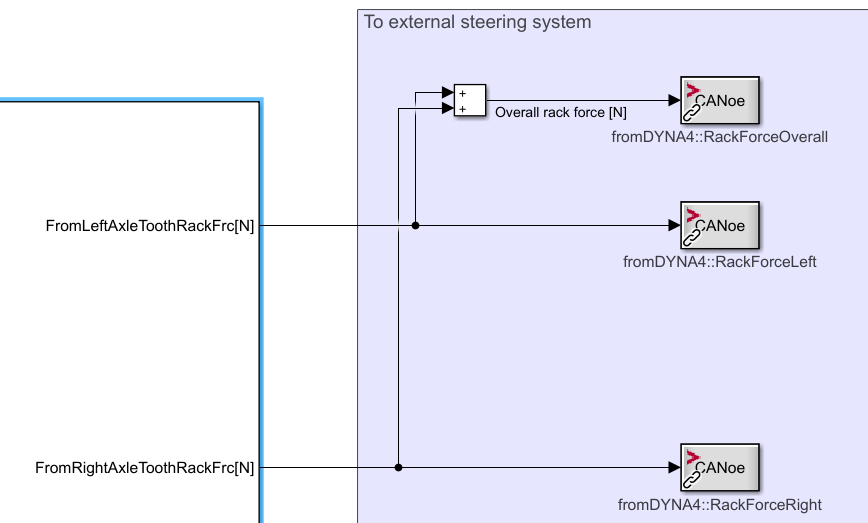
图6 DYNA4模型与CANoe信号交互
此外,DYNA4与整个转向总成配合得也非常好。对于常见的EPS测试,亦或是针对传统或者线控转向结构,都可以进行SiL、HiL的仿真测试。
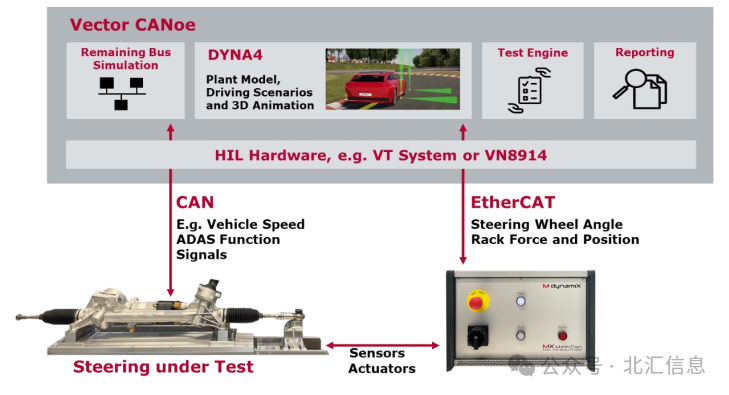
图7 DYNA4与转向总成
以乘用车为例,齿轮齿条式转向系统由一对齿轮组成,将方向盘的角度转换为转向齿条的平移运动,并可以设置转动刚度、阻尼、摩擦阻力、转动惯量、左右两端传动比、万向节传递(不等速传递特性),以及不同EPS助力形式。
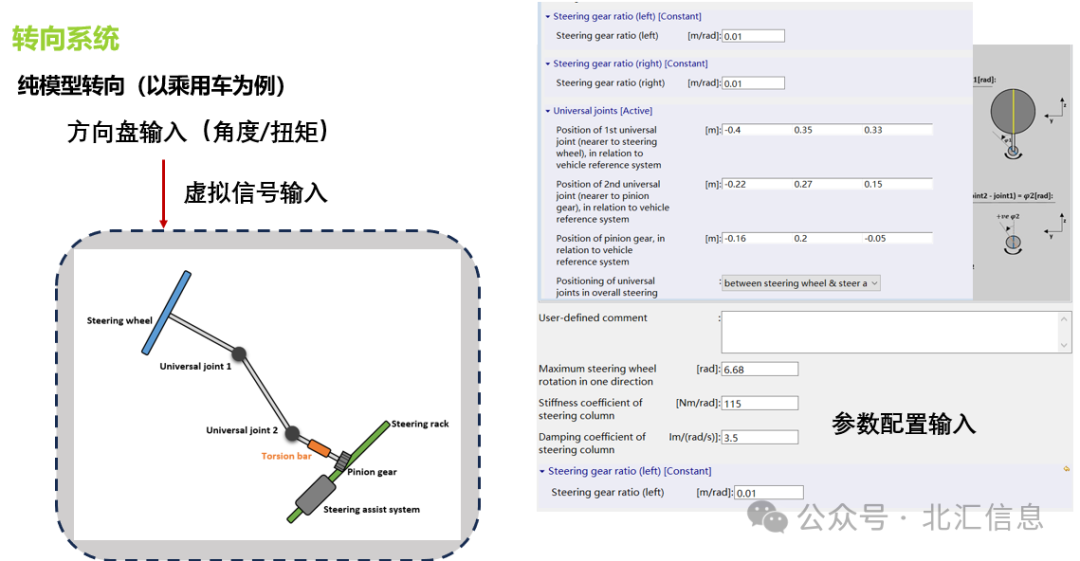
图8 DYNA4中齿轮齿条式转向
DYNA4也支持前后四轮转向。如下图为主车前、后两轴实现多轮转向,同时全挂拖车的前轴随转,半挂式拖车同样也支持。
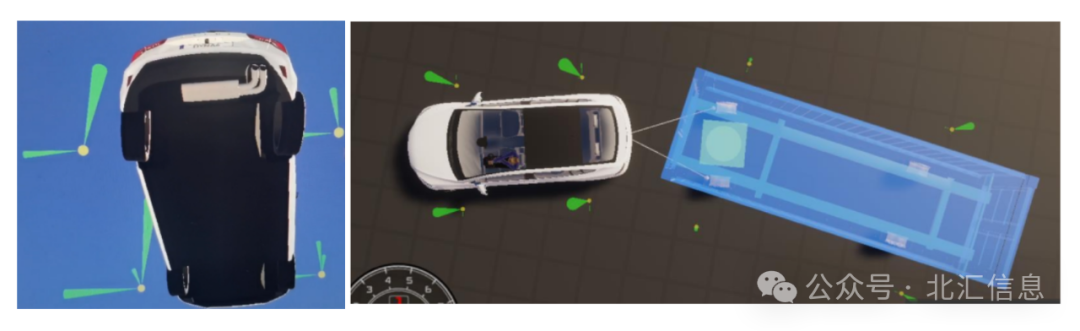
图9 DYNA4四轮转向
DYNA4自身包含丰富的场景库,也提供道路编辑功能,支持用户自行搭建测试赛道。其动画显示采用游戏引擎Unity渲染,最高可达4K分辨率。不同视角的自由切换,帮助工程师更好地观测车辆行为。
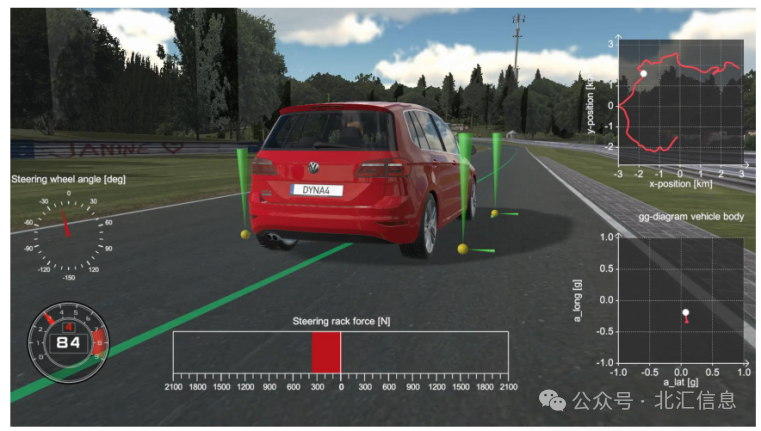
图10 DYNA4中的道路
在ADAS领域,DYNA4提供交通(Traffic)功能。不同的交通场景包括若干同道车辆以及障碍物。交通车辆支持多种驾驶任务,比如触发的车速变化,触发的变道或者这些动作的组合。从DYNA4 R8开始也支持使用OpenSCENARIO来定义和模拟复杂的驾驶场景。通过虚拟测试,自动驾驶和驾驶辅助系统能够在安全、高效、低成本的条件下进行验证与优化,为系统在真实道路上的应用奠定基础。

LKAS演示
以车道线保持功能LKAS(Lane Keeping Assist System)为例,通过观测动画以及力反馈方向盘的主动转动,验证控制策略实施的效果。LKAS算法接收车道线信息,若识别到脱离行驶车道的行为,会控制电机输出转向力矩来修正行驶方向,使车辆处于正确的车道上,同时可以集成脱手检测功能,例如若驾驶员超过20S未接管方向盘,将自动退出保持,直至检测到驾驶员手力矩的输入。此外,也可以加入摄像头来识别前方车辆,进行自适应巡航(ACC)或者主动紧急制动(AEB)功能的验证。
北汇信息依托⼗多年技术积累和项⽬经验,可以为OEM和零部件件企业提供全域全链的汽⻋电⼦测试解决⽅案,涵盖五⼤域,从模型、代码、HiL台架到实⻋测试需求。如需了解更多北汇信息的产品和服务,请随时联系我们。期待与您的交流!
注:文章部分图片来源于Vector。
-
汽车电子
+关注
关注
3031文章
8076浏览量
168355 -
线控
+关注
关注
0文章
17浏览量
6875 -
自动驾驶
+关注
关注
788文章
14002浏览量
167708
发布评论请先 登录
相关推荐
第二届北京商业航天产业高质量发展大会在北京亦庄举办

软通动力中标亦庄控股司库管理系统建设项目
基于DYNA4的智能大灯控制算法的仿真闭环测试

华为自动驾驶科学家陈亦伦投身具身智能创业

中科创达荣登北京民营企业百强和科技创新百强榜单
普强成功荣登两大榜单
亦逍遥DDR5内存评测:速度与优雅的精妙融合

小米机器人公司迁入北京亦庄小米汽车工厂
MES与ERP强强联手
宋仕强论道”系列讲座的文章暨宋仕强先生研究华强北模式和华强北文化的系列文章,再次迎来更新!

数势科技携手书亦烧仙草,引领大模型商业化落地






 工商网监
工商网监
评论