 兆威机电发布机器人灵巧手重磅新品!单板控制,17个自由度,寿命大于10年
兆威机电发布机器人灵巧手重磅新品!单板控制,17个自由度,寿命大于10年
电子发烧友网报道(文/黄山明)人形机器人是未来科技的重要发展方向,可以帮助人类释放所有低端劳动力。但想要实现这一点,灵活性必不可少,尤其是手部的灵活性,是决定机器人可以完成哪些劳动的关键。这就是机器人灵巧手,是人形机器人上的关键零部件。
目前国内有多家企业已经具备了相关核心技术与产业化能力,近期,兆威机电更是展出了自己的机器人灵巧手,让业内外一探当前机器人灵巧手技术的发展程度。
兆威机电发展多自由度灵巧手
20世纪70年代,对机器人灵巧手的研究便已经开始。不过早期的灵巧手更多是采用腱绳驱动系统与电机驱动。不过随着产业的发展,尤其是人形机器人技术的替身,需要在一个人形机械臂上进行灵巧的操作。
这就需要灵巧手的重量控制在一个合理的范围内,因此对于灵巧手的结构材料,以及驱动器的功率密度都有着极高的要求。与此同时,从运动学角度来看,要让灵巧手满足指关节运动时可以产生任意运动,而固定时可以限制物体的运动,就需要灵巧手至少要有3个手指和9个自由度。
在今年5月份,兆威机电便申请了一项名为“灵巧手控制系统、方法、灵巧手及机器人”的专利,该专利提供一种灵巧手控制系统、方法、灵巧手及机器人,涉及灵巧手领域,主要是降低了灵巧手的控制成本。
同时,兆威机电在微机电传动领域拥有6-24mm的空心杯电机的核心技术和8mm的微型步进电机产品,这些技术特点使得其灵巧手产品在市场上具有更强的竞争力。
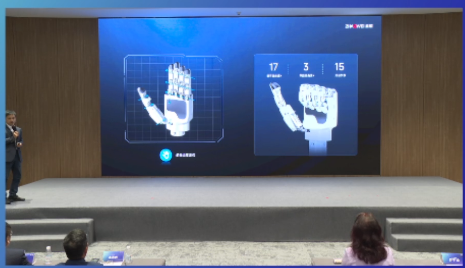
从此次兆威机电所发布的机器人五指灵巧手来看,具备其独创的单关节驱动技术,整手配备了17个自由度,以及15个关节,后续可扩展至20自由度以上。其中,单个关节拥有3个及以上的自由度。该设计解决了现有灵巧手在可靠性、灵巧性、智能性等方面的不足,能够适应工业生产、特种作业、生活服务等复杂操作环境。
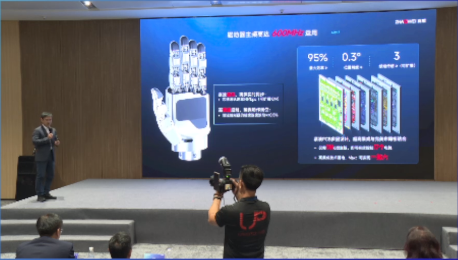
并且兆威机电采用基于Arm框架,最大可达到600MHz驱动芯片,来驱动整个灵巧手。据介绍,灵巧手内只通过一块控制板就可以实现对所有关节的控制,而这款板子在设计时便耗费了超过80天的时间。

兆威机电首席电控专家陈毅东曾表示,灵巧手的自由度并非越多越好,例如简单的抓取任务可能只需要少数几个自由度就能完成。增加自由度会增加机械设计和控制系统的复杂性,这可能导致系统更难设计、构建和维护。而通过标准化、模块化的产品设计理念,让这款灵巧手寿命大于10年。
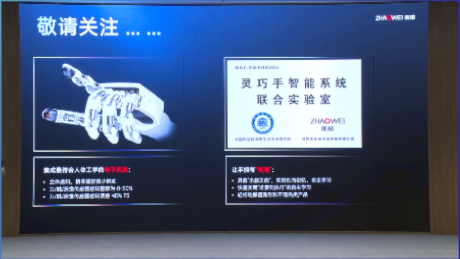
未来兆威机电将在灵巧手中集成最符合人体工学的电子皮肤,让灵巧手更像人类。同时兆威机电还与中国科学院深圳先进技术研究院达成深度合作,双方成立了“灵巧手智能系统联合实验室”,专注于具备自主学习能力的灵巧手智能系统研发,未来将让灵巧手也具备思考能力,实现更智能化的操控。
灵巧手市场规模巨大,成人形机器人技术突破的关键
人形机器人灵巧手作为人形机器人与外界交互的重要媒介,在机器人学领域属于末端执行器的范畴,对提高机器人的柔性和易用性有着极为重要的作用。随着人形机器人的发展,灵巧手的需求也在不断增长。
根据Statista的预测数据,全球机器人灵巧手市场规模将由2021年的11.6亿美元增长至2030年的30.35亿美元,2022-2030年间CAGR为10.9%。同时,全球机器人灵巧手市场容量将由2021年的50.75万只增长到2030年的141.21万只,2022-2030年间CAGR为11.7%。
据中商产业研究院分析师预测,2024年全球机器人灵巧手市场容量将达 76.01 万只,市场规模将达17.06亿美元,2030年全球机器人灵巧手市场规模将突破30亿美元。
头豹研究院预测,保守情况下,2030年全球人形机器人灵巧手市场规模为320.6亿元,年复合增长率为81.2%,乐观情况下达879.7亿元,年复合增长率为109.3%。
从成本来看,有机构报告显示,目前单只人形机器人灵巧手成本约为2.8万元,随着产业成熟后,成本有望降低至1.5万元。因此推测到2030年人形机器人灵巧手全球市场空间约568亿元,2023-2030年市场空间复合增速约35%。
Markets and Markets的报告则预测人形机器人市场规模将从2023年的18亿美元增长到2028年的138亿美元。参考特斯拉Optimus量产目标售价2万美元,预测2028年人形机器人的销售量为69万个,灵巧手销售量为138万只,假设到2028年灵巧手的价格降幅为60%,即从5万元/只降为2万元/只,那么2028年人形机器人产业将为灵巧手带来276亿元的市场。
此外,随着全球人口老龄化的加剧和劳动力成本的上升,对于人形机器人灵巧手的需求将持续增长。特别是在医疗、工业、服务等领域,灵巧手将发挥越来越重要的作用。
另一方面,随着人们生活水平的提高和消费观念的转变,对于智能化、个性化的服务需求也将不断增加,为人形机器人灵巧手行业带来更大的市场空间。同时,技术创新推动产业升级,未来,随着技术的不断创新和突破,人形机器人灵巧手将实现更加高效、智能、安全的操作。
总结
灵巧手作为人形机器人与环境交互的末端执行器,模仿了人手的结构和功能,能够灵活地操作物体和抓取物品。这种灵活性和操作能力对于人形机器人来说至关重要,此次兆威机电发布的灵巧手,以更高的自由度,可以更好的完成复杂的工作。未来还将引入深度学习、强化学习等先进技术,让灵巧手将具备更强的自主学习和适应能力,加速推动人形机器人的商业化落地和相关技术的创新和行业发展。
活动推荐
最后为大家推荐一个产业活动。11月21日,电子发烧友网主办的“2024|第十二届(秋季) 电机控制先进技术研讨会”将在深圳益田威斯汀酒店举办,届时行业代表性厂商将分享在电机控制和驱动方面的前沿产品和应用,欢迎大家扫码关注!
-
机器人
+关注
关注
211文章
28799浏览量
209072
发布评论请先 登录
相关推荐

黑芝麻智能、NESINEXT、傅利叶联合发布“灵巧手”
鸣志发布全新高速电机,助力灵巧手应用发展
开源项目!OpenCat—— 一个全能的平价四足机器人
虹科携手Seed Robotics,开启机器人灵巧手合作新篇章

普渡机器人亮相2024高交会
小鹏汽车正式进军人形机器人领域,发布AI机器人Iron
灵巧手成为机器人竞争下半场,但空心杯电机要失宠了?
“0元购”智元灵犀X1机器人,软硬件全套图纸和代码全公开!资料免费下载!
堪称地表最强“打工人”,人形机器人Figure02领衔灵巧手进化

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
基于FPGA的六自由度机器人视觉伺服控制方案设计

具身智能机器人开发平台再添新秀!广和通发布基于高通高算力芯片的Fibot






 工商网监
工商网监
评论