 YOLOv10自定义目标检测之理论+实践
YOLOv10自定义目标检测之理论+实践

概述
YOLOv10 是由清华大学研究人员利用 Ultralytics Python 软件包开发的,它通过改进模型架构并消除非极大值抑制(NMS)提供了一种新颖的实时目标检测方法。这些优化使得模型在保持先进性能的同时,降低了计算需求。大量实验表明,YOLOv10 在各种模型规模上提供了更优的准确率-延迟权衡。
正如读过我之前文章的朋友所知道的,我分享了使用 YOLO 模型的各种项目,因为在预训练模型中,YOLO 模型在性能和效率方面明显优于其他模型。然而,实时目标检测由于依赖非极大值抑制(NMS)和架构效率低下而面临挑战。YOLOv10 通过消除 NMS 并采用专注于效率和准确性的设计策略解决了这些问题。
架构
来自 Ultralytics 的图示
骨干网络:负责特征提取,YOLOv10 的骨干网络使用增强版的 CSPNet(交叉阶段部分网络)来改善梯度流动并减少计算冗余。
颈部网络:设计用于聚合不同尺度的特征并将其传递到头部网络。它包含用于有效多尺度特征融合的 PAN(路径聚合网络)层。
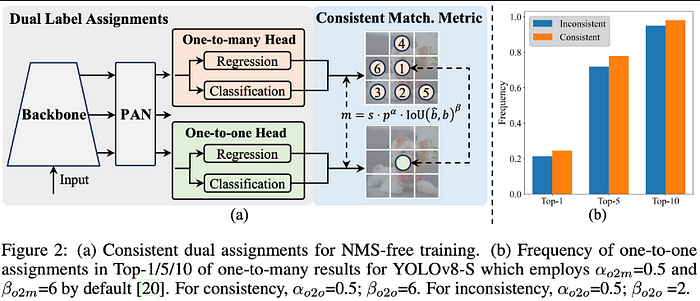
一对多头:在训练过程中为每个对象生成多个预测,以提供丰富的监督信号并提高学习准确性。
一对一头:在推理过程中为每个对象生成一个最佳预测,消除 NMS 的需要,从而减少延迟并提高效率。
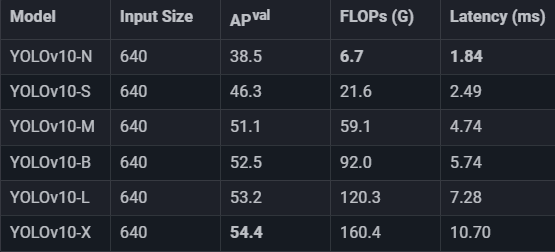
模型变体及性能YOLOv10 提供六种模型:
YOLOv10-N:用于极其资源受限环境的纳米版。
YOLOv10-S:平衡速度和准确性的小型版。
YOLOv10-M:用于通用的中型版。
YOLOv10-B:增加宽度以提高准确性的平衡版。
YOLOv10-L:在增加计算资源成本的情况下提高准确性的高级版。
YOLOv10-X:用于最大化准确性的超大型版。
来自 Ultralytics 的图示
比较让我们看看在标准基准(如 COCO)上测试的不同模型在延迟和准确性方面的比较。
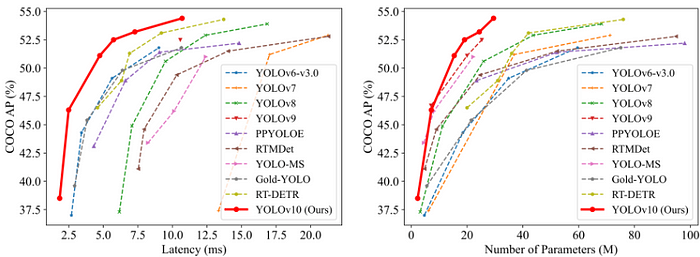
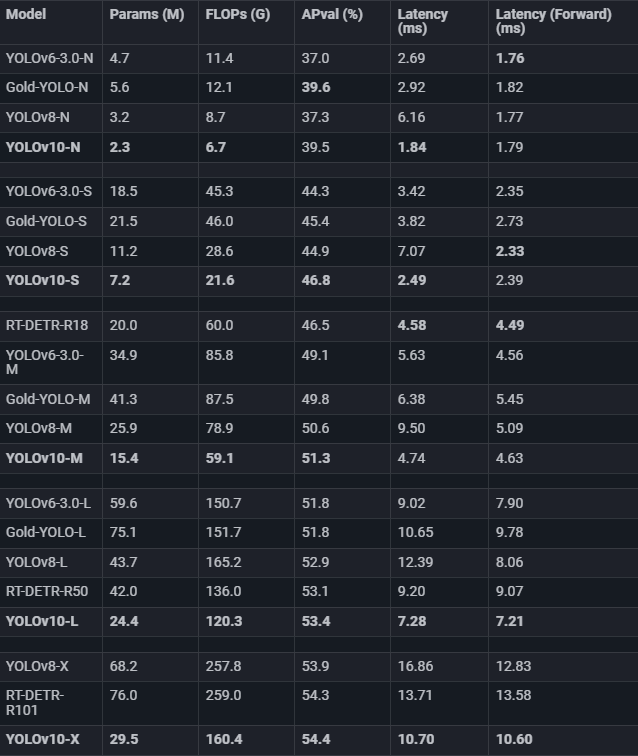
很明显,YOLOv10 是实时目标检测应用的前沿技术,以更少的参数提供更高的准确性和速度性能。
训练 YOLOv10 进行自定义目标检测首先,克隆官方 YOLOv10 GitHub 仓库以下载必要的 yolov10n 模型。
!pip install -q git+https://github.com/THU-MIG/yolov10.git !wget -P -q https://github.com/jameslahm/yolov10/releases/download/v1.0/yolov10n.pt
您可以在 Roboflow Universe 上尝试任何自定义项目,创建自己的数据集,甚至使用由 Intel 赞助的 RF100 数据集。对于本文,我将使用一个预先准备好的数据集,用于检测 X 射线图像中的危险物品。数据集链接:https://universe.roboflow.com/vladutc/x-ray-baggage
使用 Roboflow API 以 YOLOv8 格式下载您的模型。
!pip install -q roboflow from roboflow import Roboflow rf = Roboflow(api_key="your-api-key") project = rf.workspace("vladutc").project("x-ray-baggage") version = project.version(3) dataset = version.download("yolov8")
配置参数,开始训练:
!yolo task=detect mode=train epochs=25 batch=32 plots=True model='/content/-q/yolov10n.pt' data='/content/X-Ray-Baggage-3/data.yaml'
示例 data.yaml 文件
names: - Gun - Knife - Pliers - Scissors - Wrench nc: 5 roboflow: license: CC BY 4.0 project: x-ray-baggage url: https://universe.roboflow.com/vladutc/x-ray-baggage/dataset/3 version: 3 workspace: vladutc test: /content/X-Ray-Baggage-3/test/images train: /content/X-Ray-Baggage-3/train/images val: /content/X-Ray-Baggage-3/valid/images
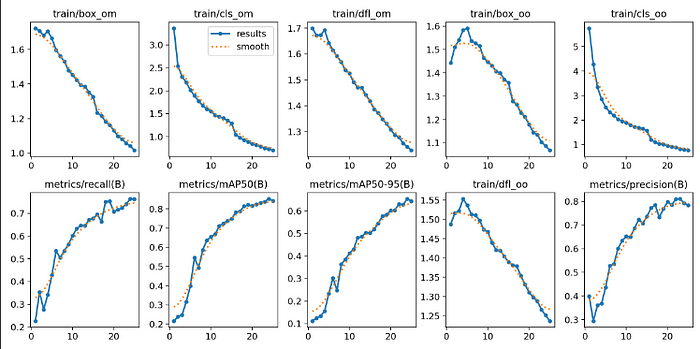
让我们看看结果。
Image(filename='/content/runs/detect/train/results.png', width=1000)
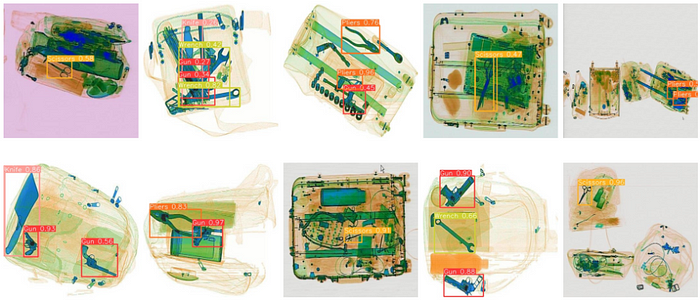
让我们预测测试数据并在 5x2 网格中显示结果。
from ultralytics import YOLOv10 model_path = '/content/runs/detect/train/weights/best.pt' model = YOLOv10(model_path) results = model(source='/content/X-Ray-Baggage-3/test/images', conf=0.25,save=True)
import glob
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
images = glob.glob('/content/runs/detect/predict/*.jpg')
images_to_display = images[:10]
fig, axes = plt.subplots(2, 5, figsize=(20, 10))
for i, ax in enumerate(axes.flat):
if i < len(images_to_display):
img = mpimg.imread(images_to_display[i])
ax.imshow(img)
ax.axis('off')
else:
ax.axis('off')
plt.tight_layout()
plt.show()
-
目标检测
+关注
关注
0文章
234浏览量
16544 -
数据集
+关注
关注
4文章
1240浏览量
26261
原文标题:YOLOv10 自定义目标检测 | 理论+实践
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
使用Python/MyHDL创建自定义FPGA IP

MCUXpresso SDK创建自定义清单
极海APM32F427如何实现自定义USB HID设备与PC进行通信

如何为 Vision Five 2 编译自定义 Linux 内核?
电能质量监测装置可自定义监测时段吗?
电能质量在线监测装置的自定义监测时段功能有哪些应用场景?

电能质量在线监测装置的自定义监测时段功能与离线监测有什么区别?

无图形界面模式下自定义检查工具的应用

采用汇编指示符来使用自定义指令
如何使用SDK进行自定义音频播放功能

LOTO示波器自定义解码功能—CANFD解码


KiCad 中的自定义规则(KiCon 演讲)



评论