 运用MATLAB模型预测控制技术提升风力发电机运行效率
运用MATLAB模型预测控制技术提升风力发电机运行效率
基于模型的设计对我们的开发过程至关重要……这种方法使我们能够在全尺寸 3 MW 风力发电机上测试控制器的运行。
为了到 2050 年实现净零排放,风能生产需要维持 17% 同比增长。随着全球风力发电机(WT)的总装机容量持续增长,风电行业正在更加注重优化长期运营效率。这不仅包括最大化电力输出,还包括最小化制造和维护成本——同时确保安全和电网合规。使用基于比例积分 (PI) 或比例积分微分 (PID) 算法的传统控制策略几乎无法实现所有这些目标。因此,研究小组一直在探索使用更先进的控制策略,包括模型预测控制(MPC)。
MPC 非常适合 WT 控制应用,因为它可以压缩优化问题中的多个、有时相互冲突的控制目标和约束。事实上,我们的前同事们之前证明了 MPC 对风力发电机控制的有效性通过使用基于模型的控制器设计和快速控制原型。
最近,我们(亚琛工业大学自动控制研究所的研究人员和 W2E Wind toEnergy GmbH 的工程师团队)扩展了这项早期工作,将机器学习回归模型集成到 MPC 中。通过此项改进,控制器主动调整叶片螺距角和发电机扭矩,以最大限度地减少风力发电机的负载交替,旨在降低长期磨损和损坏风险。我们使用的算法源自 IntelliWind 研究项目,资助编号为 01IS22028A/B。基于模型的设计对我们的开发过程起到了重要作用:我们使用了 MATLAB 训练机器学习模型,将 MPC 内部预测模型的动态状态映射到转子推力的变化, Simulink 和 Model Predictive ControlToolbox 对控制器进行建模和广泛模拟,并使用 Simulink Coder 生成代码以部署在 Bachmann 工业控制系统上。这种方法使我们能够在由 W2E Wind toEnergy 运营的全尺寸 3 MW WT 上测试控制器的运行(图 1),这是验证该新型控制器设计是否可投入生产的重要一步。
▼
训练机器学习模型并将其纳入 MPC
MPC 的性能和稳定性在很大程度上受到其预测模型的准确性和保真度的影响。鉴于保真度较高的模型通常需要更多计算,因此 MPC 设计需要权衡。例如,将 WT 的完整计算流体动力学模型纳入 MPC 是不切实际的,因为从这种模型生成预测所需的时间可能远远超过控制器的采样时间。
为了解决保真度和计算强度之间的设计权衡,我们使用了机器学习模型(具体来说是局部线性神经模糊模型 LLNFM)来快速预测涡轮转子推力的变化。在 MPC 中,我们将此 LLNFM 与 WT 的非线性降阶模型相结合(图 2)。然而,在将其纳入我们的控制设计之前,我们首先需要训练机器学习模型。
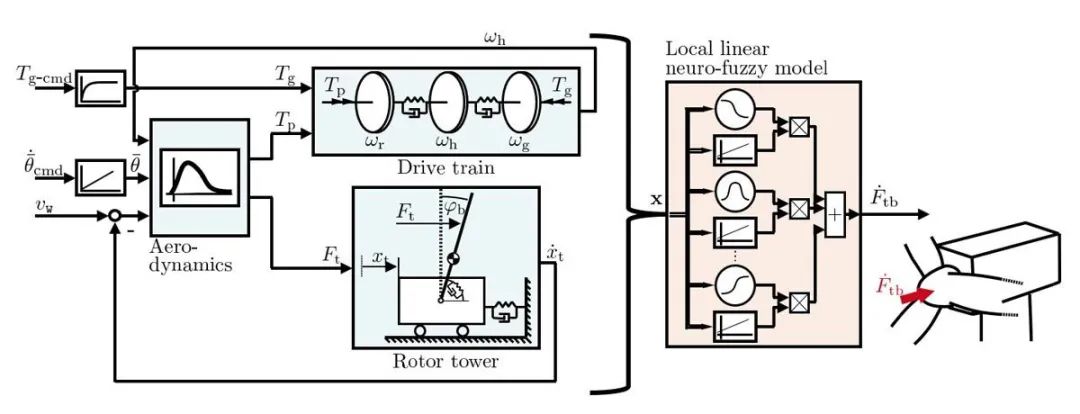
图 2. 将局部线性神经模糊模型(右)与降阶模型(左)相结合,该模型由 WT 传动系统动力学机械子模型、转子塔和叶片动力学机械子模型以及空气动力学第三子模型组成。
训练任何机器学习模型(包括我们的 LLNFM)都需要数据。我们使用以下方法生成合成训练数据 alaska/Wind 软件,我们在该软件中根据外部风力对转子上的内部负载进行建模和模拟。具体来说,我们进行了模拟,以测量各种风况(包括不同的速度以及极端的运行阵风)下转子上的推力。然后我们将这些数据导入 MATLAB 并进行预处理。预处理步骤包括计算时间导数(因为我们想在改变计算推力随时间的变化)并应用低通滤波器消除由风的随机因素引起的高频份额(图 3)。
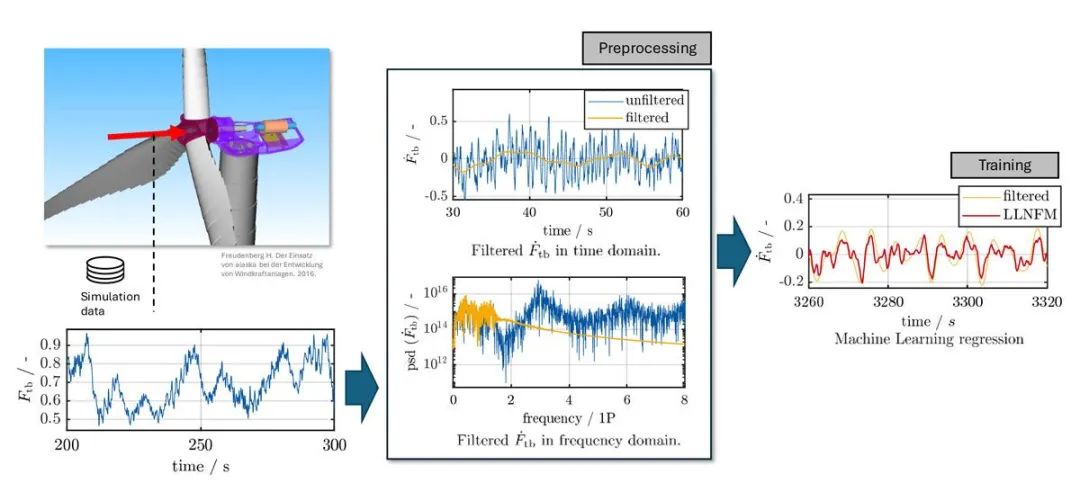
图 3. 工作流程概述:捕获模拟数据,预处理数据,然后使用它来训练局部线性神经模糊模型。
我们使用 LOLIMOT(局部线性模型树)算法构建并训练了 LLNFM,该算法由 LMN-Tool,来自锡根大学的 MATLAB 工具箱。我们使用 LLNFM,因为它代表非线性关系,但与其他机器学习技术相比提供了可管理的复杂性。这带来了更高的可解释性,这在现实世界的控制应用中是一个优势,因为在这样的应用中,最大限度地降低对工厂造成任何潜在损害的风险是一个关键关注点。
一旦我们训练并验证了 LLNFM,我们就会使用符号框架 CasADi 根据模型创建符号表达式,并根据系统状态计算模型的雅可比矩阵。我们创建了一个 S-函数基于该模型的符号表达及其雅可比矩阵。在 Simulink 中,此 S-函数被调用来获取控制器扩展卡尔曼滤波器 (EKF) 中的线性化状态空间模型,并由自适应 MPC 控制器块来估计操作条件变化时的预测模型状态(图 3)。
▼
模拟和调节控制器
将机器学习模型集成到 MPC 后,我们的下一步是运行模拟来调整控制器并评估其性能。该控制器的设计目的是最大限度地提高功率输出,同时最大限度地减少结构负荷。
我们以从切入风速到切出风速的各种风速进行了多次模拟。然后,我们在 MATLAB 中分析结果,并将新的机器学习增强型 MPC 与现有 MPC 和基线经典控制系统的性能进行了比较。虽然机器学习增强型 MPC 对部分负载状态(风速较低)下的推力动态影响很小,但在满载状态(风速较高)下,它降低了主要第一塔特征模态周围频率范围内的推力动态(图 4)。模拟结果表明,机器学习增强型 MPC 产生的功率与现有 MPC 相似(图 5)。
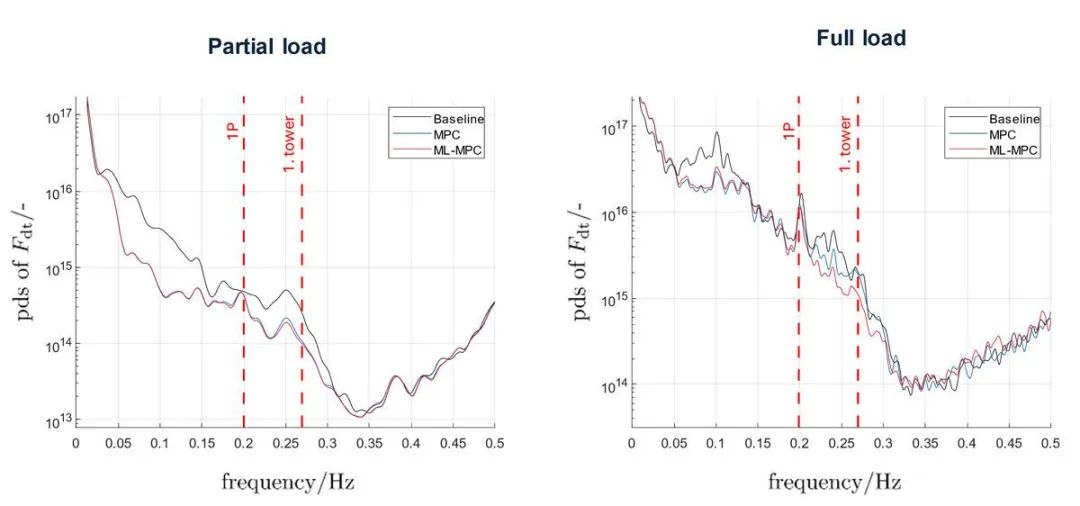
图 4. 三种类型的控制器在部分负载条件(左)和满负载条件(右)下的推力功率谱密度图:基线(黑色)、无机器学习的 MPC(蓝色)和有机器学习的 MPC(红色)。
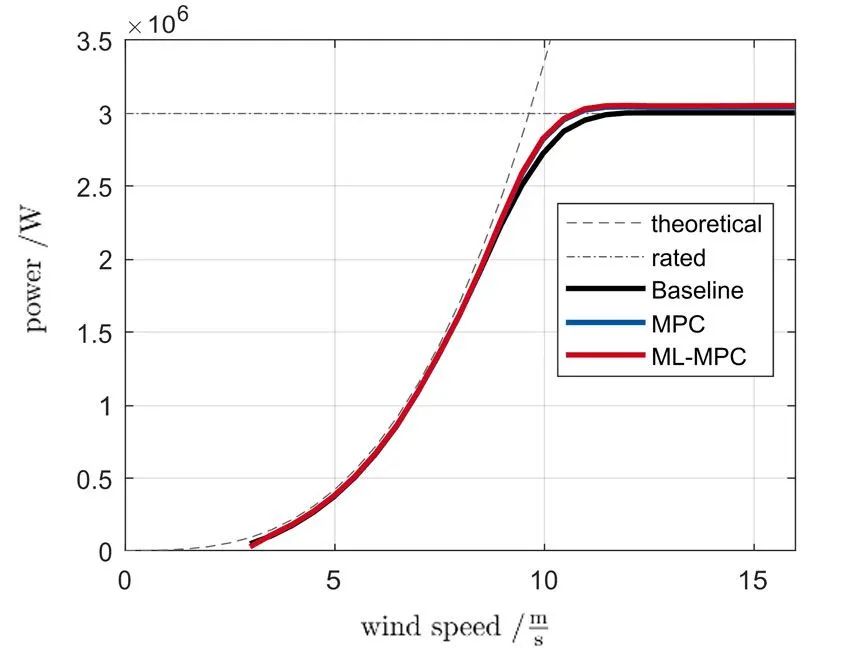
图 5. 不同风速下的模拟功率输出图,显示机器学习增强型 MPC(红色)、无机器学习的 MPC(蓝色)和基线控制(黑色)替代方案的输出相似。
▼
在真实的风力发电机上部署和测试
虽然模拟让我们对控制设计充满信心,但了解它在真实 WT 上的表现以及评估其在真实操作条件下的稳健性对我们的研究项目也至关重要。为了实现这一目标,我们使用了 Simulink Coder Simulink 的 M-Target 从我们的控制器生成代码,用于安装在 W2E Wind to Energy WT 中的 BachmannElectronic GmbH 的 MH230 PLC。现场试验进展顺利,证实了全尺寸风力发电机组在部分负荷和满负荷条件下的稳定运行(图 6)。
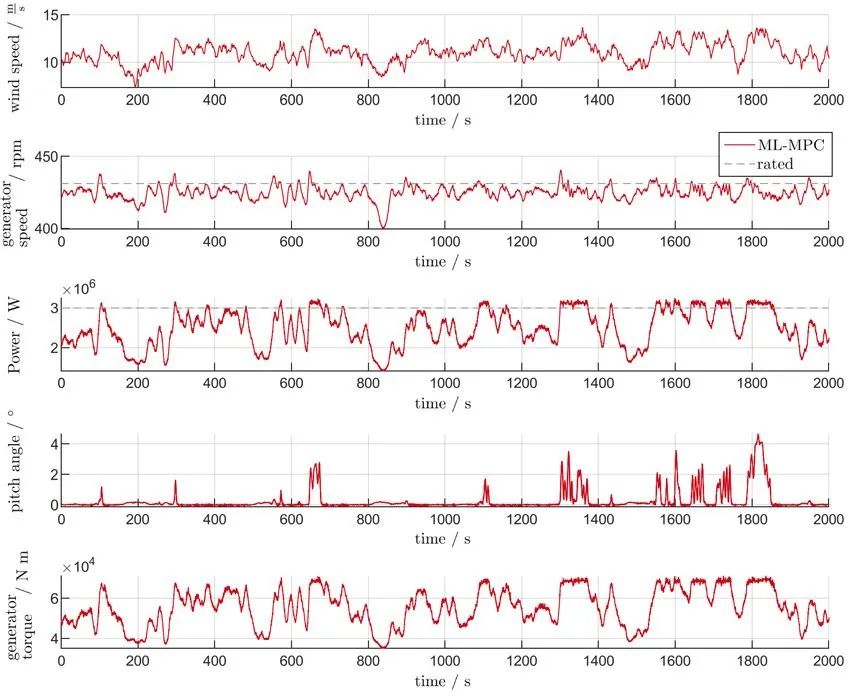
图 6. 控制罗斯托克 3 MW 风力发电机的新机器学习增强型 MPC 的实验现场测试结果。
因此,在这个第一个概念验证中,我们展示了在全面 WT 上的高级 MPC 算法中使用机器学习扩展的普遍可能性。这将使我们能够在未来的实验中测试更复杂的机器学习算法,并进一步改善风力发电机的运行。
近期,我们期待对 WT 进行更广泛的现场测试,并有机会进一步优化和调整控制器。我们还在探索其他几种潜在的改进方法,包括使用激光雷达传感器为控制器提供更准确的风传播估计,以及使用单独的叶片螺距控制(而不是集体叶片螺距控制)来进一步提高控制精度和性能。
-
matlab
+关注
关注
184文章
2970浏览量
230359 -
控制器
+关注
关注
112文章
16308浏览量
177783 -
风力发电机
+关注
关注
6文章
192浏览量
20899
原文标题:风能管理 | 利用 MATLAB 通过模型预测控制优化风力发电机的效率
文章出处:【微信号:MATLAB,微信公众号:MATLAB】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
无刷双馈发电机的matlab仿真模型研究 相关资料分享
【源码】风力发电机模型 精选资料分享
【源码】风力发电机模型version 2.5.0.0 精选资料分享
基于MATLAB实现对风力发电机噪声的倍频程分析处理





 工商网监
工商网监
评论