 LD2410S测试、接线和常见问题一文详解
LD2410S测试、接线和常见问题一文详解
HLK-LD2410S是海凌科推出的一款爆款24G雷达模块,不仅保持了高精准识别人体运动状态的能力,而且将超低功耗的特性发挥到了极致,迎合了当今社会节能环保的主流趋势,也满足了客户对低功耗、环保型产品的迫切需求。本文主要讲解这款模块如何使用,以及在使用过程中遇到问题如何解决?
一.LD2410S接线教程
1.引脚接线对应图

2.引脚接线示意图
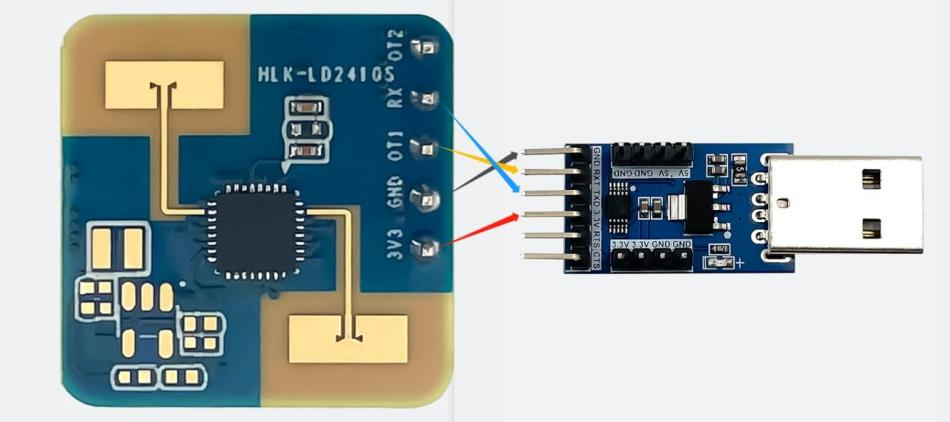
OT2定义为OUT输出脚,可不接。
二.LD2410S模块测试教程
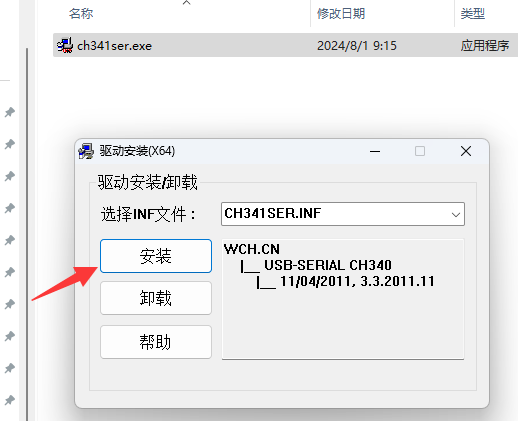
2.1.安装驱动文件
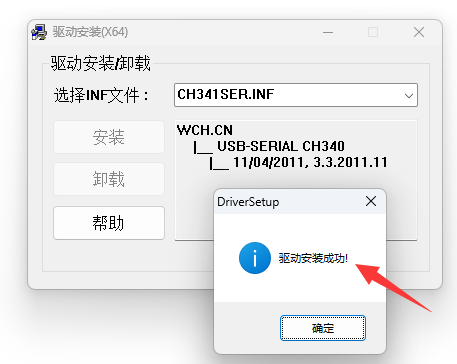
(1)打开驱动文件,点击安装,安装完成后显示驱动安装完成。
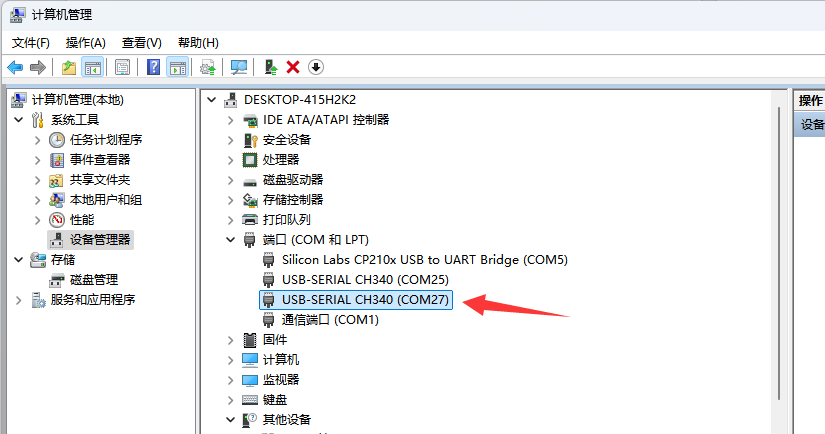
(2)安装好驱动后,接入线,可以看到设备管理的端口如下图所示。
2.1.引脚接线示意图
(1) 默认上报数据
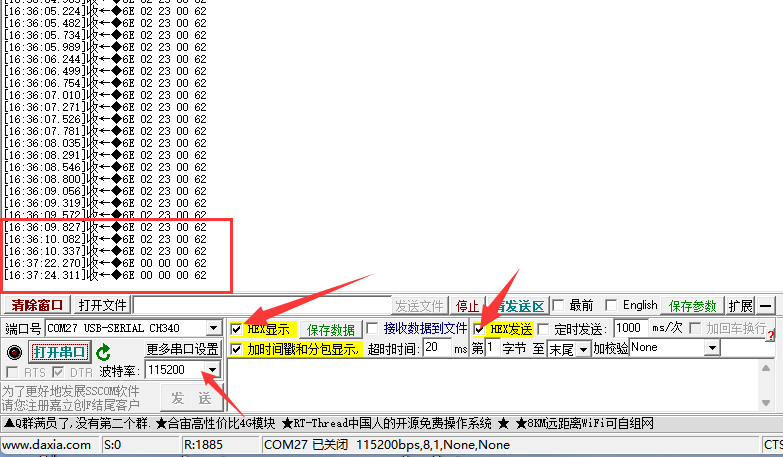
2410S的串口默认波特率为 115200,1 停止位,无奇偶校验位,默认上报数据如下图所示,数据采用小端格式,距离为0023,切换成十进制为35.
[1610.082]收←◆6E 02 23 00 62
帧头:6E 目标状态:02(有人)目标距离:23 00(35cm)帧尾:62
[1622.270]收←◆6E 00 00 00 62
帧头:6E 目标状态:00(无人)目标距离:23 00(35cm)帧尾:62
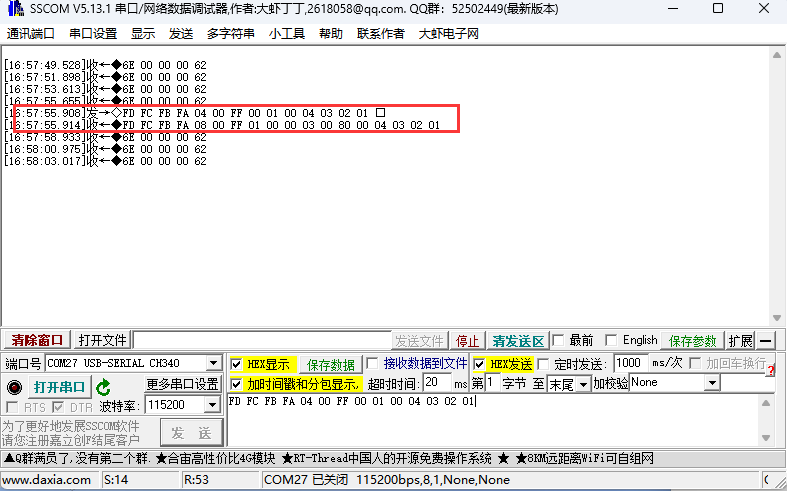
(2)检测收发指令是否正常
发送使能配置指令(FD FC FB FA 04 00 FF 00 01 00 04 03 02 01),查看是否有回复,正常情况下发送使能配置指令回复后数据会停止上报,需要在3s内发送参数指令,3s内不发送指令时,会自动退出配置模式。
2.1.简单测试
(1) 默认参数
(1)简单测试
简单测试雷达是否正常时,可以将最大检测距离设置为0.7米,目标消失延迟时间设置为10s,频率都调整成8HZ,响应速度调整成快速再去测试,修改参数之后,再写入传感器设置。如果想看是否写入成功,可以再读取一下设置。

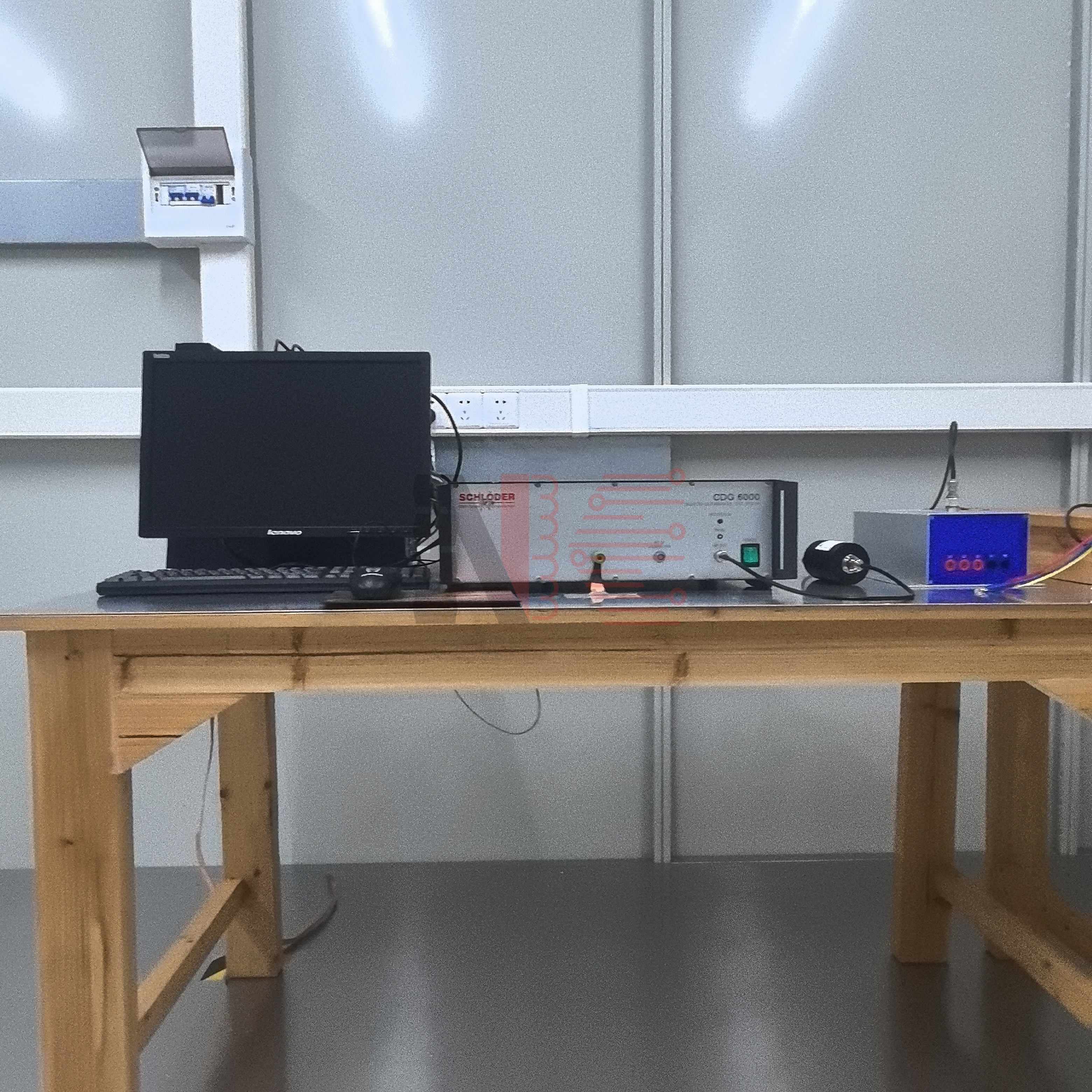
此时进入目标信息页面,查看状态变化,如果人在0.7m的探测范围内时,则状态显示为红色。
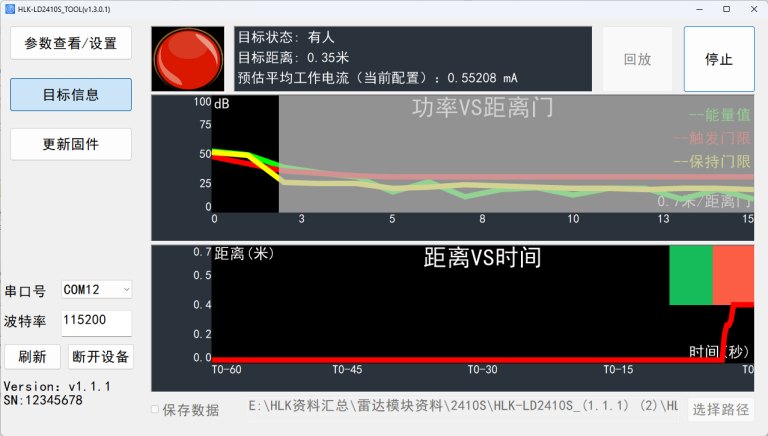
离开探测范围后状态变为绿色。
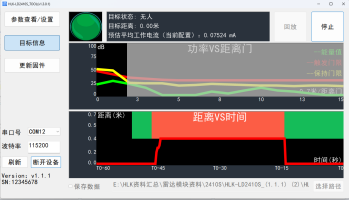
如果状态有变化就说明,模块工作是正常的。
三.注意事项及常见问题整理
3.1.固件和上位机的对应
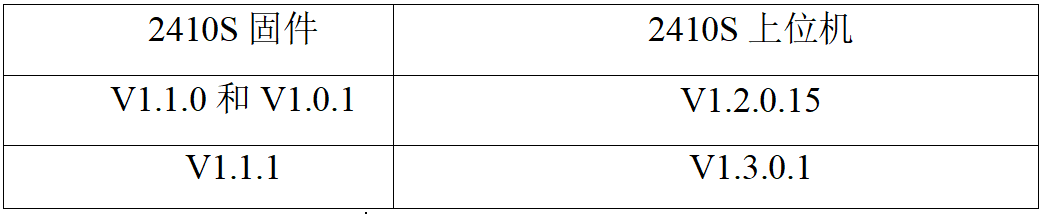
LD2410S分为旧固件(V1.1.0和V1.0.1)和新固件(V1.1.1),分别对应旧上位机(V1.2.0.15)和新的上位机(V1.3.0.1),如果不使用对应的上位机,那么就会出现读取写入参数失败的情况。其对应使用的关系如下表所示:
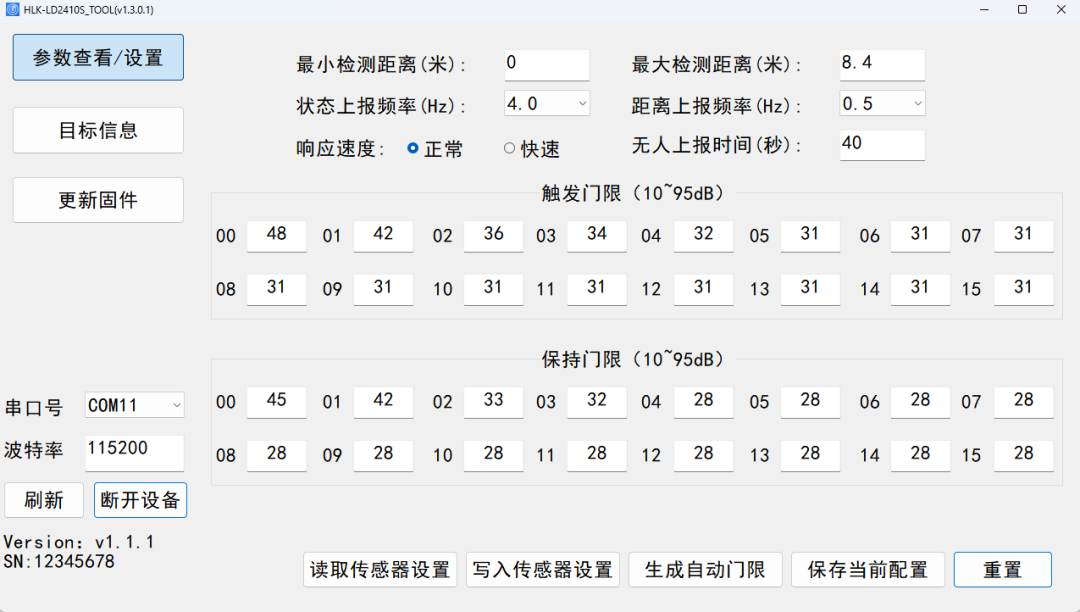
3.2.旧版上位机参数详解

(1)最小检测距离和最大检测距离
如果说此时设置最小检测距离为1.4,最大检测距离为8.4,那么黄色阴影部分就是模块的探测区域。
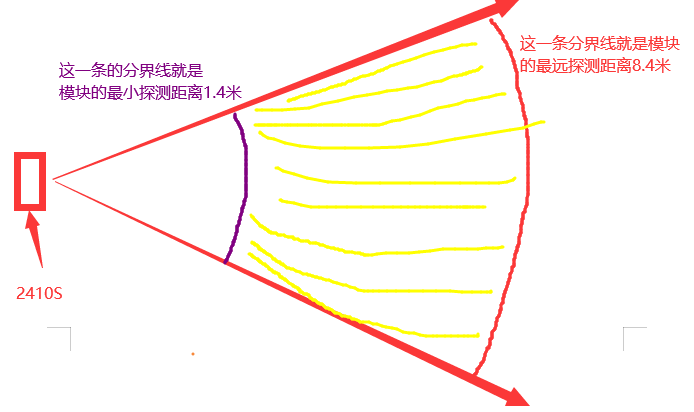
(2) 为什么模块的探测距离是8米却能设置到8.4米?
距离参数只能设置0.7的倍数,也就是说,如果你需要探测6米的距离,那么你最大检测距离就需要设置6.3的距离,当然,如果你直接设置成6米,写入参数后,是会自动保存成离你设置的最近的数字,也就是说如果你输入的是6,写入参数后,自动变成6.3。
(3)为什么最小距离门设置成1.4,1.4米内还能够被探测到?
一般设置都不建议设置最小距离门,默认保持为0,因为模块探测距离可能有误差,并不能完全去屏蔽前面的探测距离。
(4)距离门是什么?
简单的说就是一段距离,总共有15个距离门,一个距离门0.7米,共10.5米的距离,但2410S模块实际只有8米的检测距离,也就是说只有前12个距离门是有效距离门。
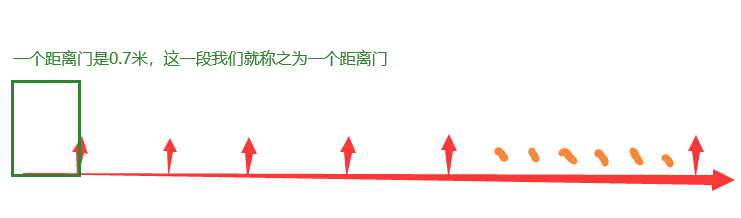
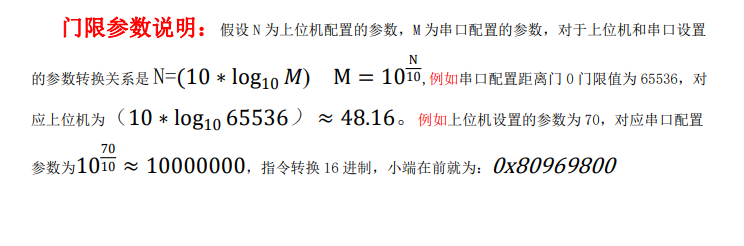
(5)距离和门限有什么对应关系?
一个距离门的分辨率是0.7米,也就是每个距离门都有对应的一个门限参数,比如,00-07,这8个距离门,00对应的是本身也就是0米,01对应的是0-0.7米,02对应的是0.7-1.4米,以此类推,07对应的是4.2-4.9米。
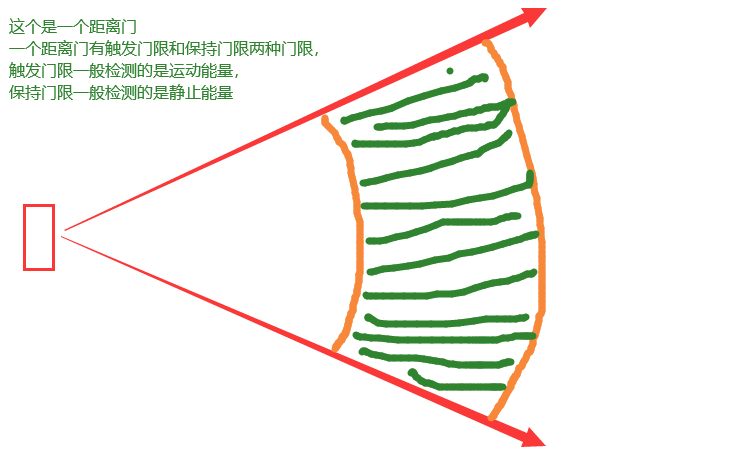
(6) 3.2.6.触发门限和触发信噪比门限?保持门限和保持信噪比门限都是什么?
触发门限和触发信噪比门限是一样的,都是阈值,前期是因为00-07号距离门和08-15号门的参数设置范围不同,为了区分,就有两个解释,后面为了方便理解已经将两个解释统一为触发门限。保持保持门限和保持信噪比门限同理。
(7) 状态上报频率和距离上报频率是什么?
状态上报频率:传感器上报有人/无人状态的频率。
距离上报频率:有人状态下,传感器上报目标距离的频率。
0.5Hz表示2s上传1次,8Hz表示1s上传8次。
3.3.新版上位机参数详解

(1) 触发门限和保持门限是什么?
新版上位机的触发门限对应的就是旧版上位机的触发门限和触发信噪比门限,保持门限对应的是就是旧版上位机的保持门限和保持信噪比门限,简单的说门限就是一个阈值,当能量值高于设定阈值后,就触发。雷达工作也就是这样,检测到物体的能量值大于设定的阈值,那么就触发,否则就不触发。
(2)读取/写入传感器设置是什么?
写入传感器就是写参数,读取传感器就是读参数,修改完参数后,就可以写入设置,设定的参数就写进入,需要读取参数时就使用读取传感器设置。
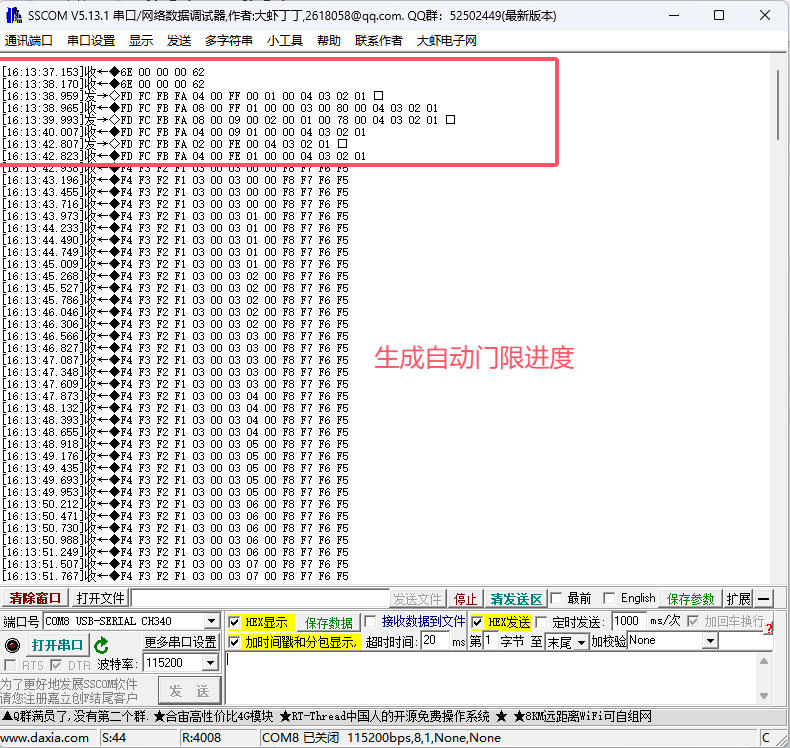
(3)生成自动门限是干什么的?
这个就是用来排除环境干扰的,一般是在无人环境下检测底噪,一般适用于默认参数下,人不在探测范围内还是检测到有人,此时就可以使用这个功能。
打个比喻,此时01触发门限值是42,01保持门限值是42,但此时环境无人,还是一直触发有人,使用这个功能检测完底噪后01号触发门限变成43,01保持门限变成43,此时再检测,状态就可以从有人变成无人,不会一直触发有人。
(4)无人上报时间是什么?
每个距离门有两个门限,一个触发门限,一个保持门限,只有当所有距离门的所有能量值低于所有门限后,超过这个时间,才会从有人变成无人状态。默认最小是10s,受到内部算法限制,目前不可再调小。
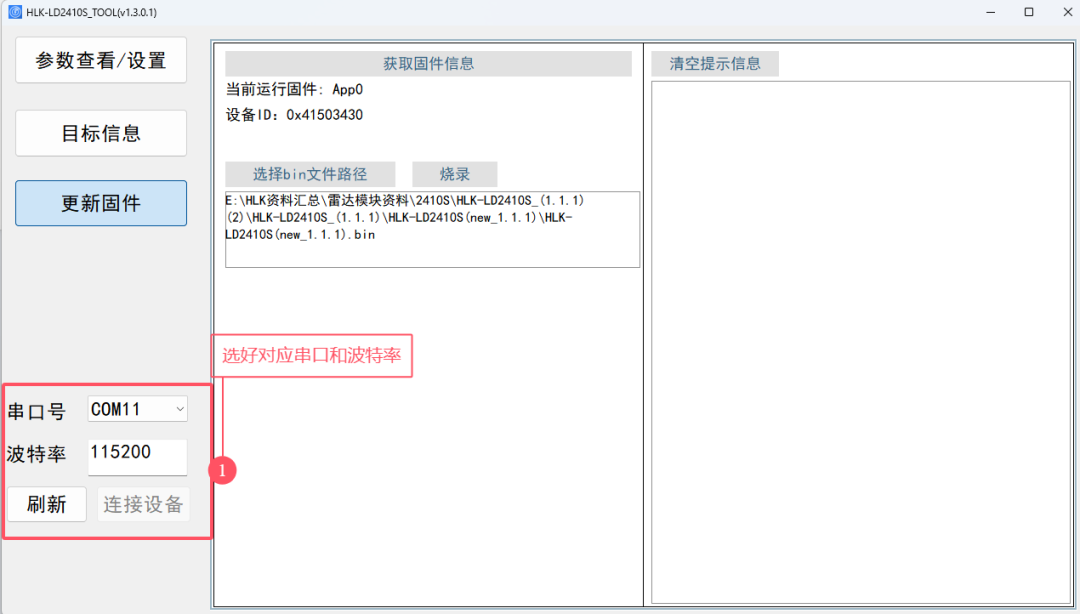
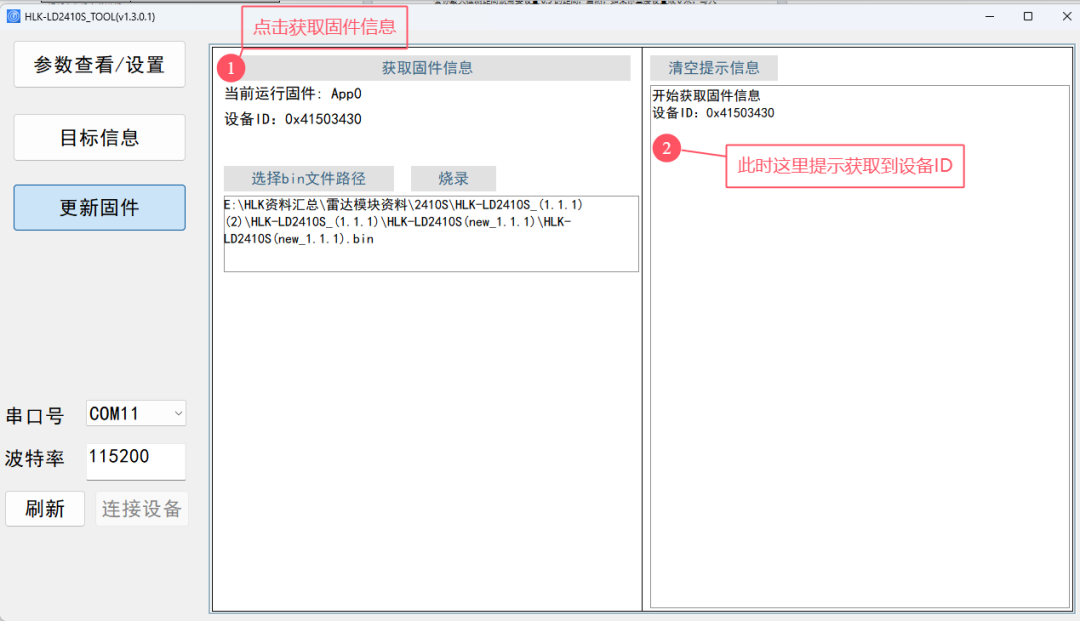
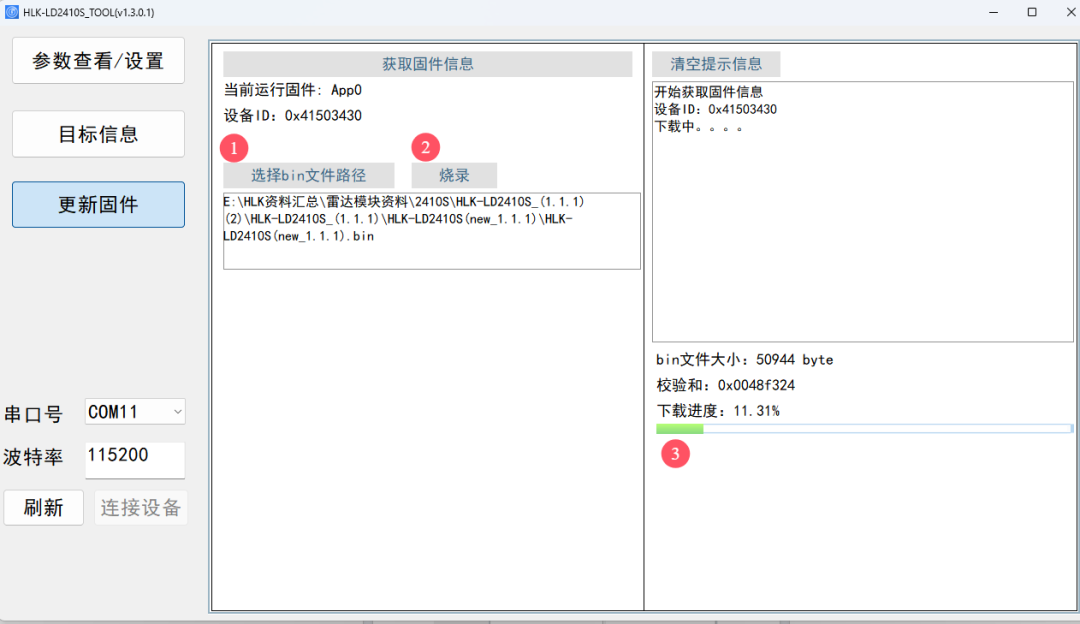
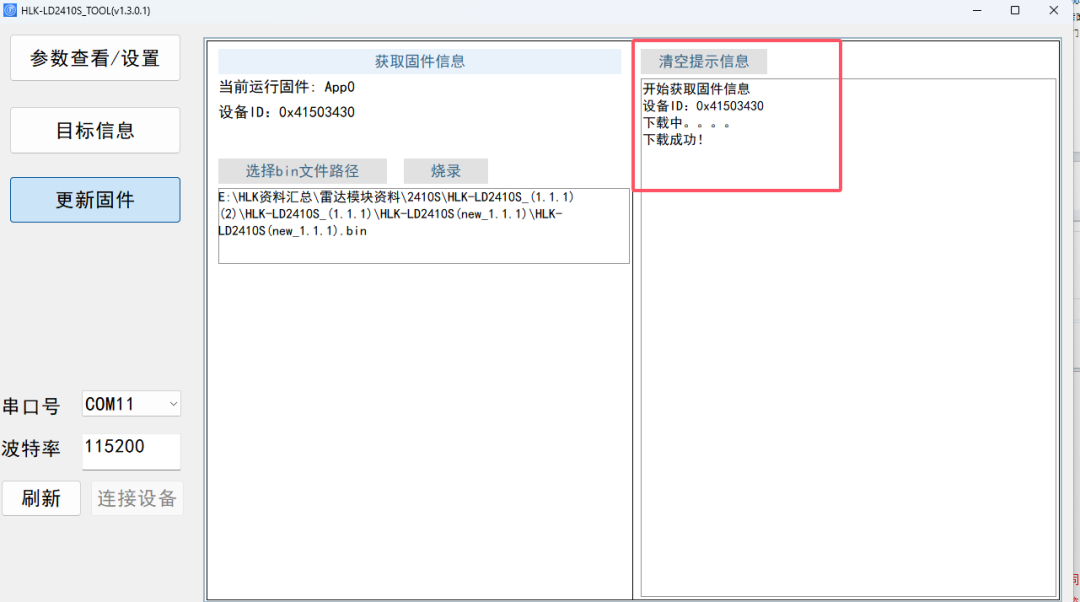
3.4.如何OTA升级固件
选择对应串口和波特率,注意此时不要点击连接设备,下一步点击获取固件信息,再下一步选择bin文件的路径,最后点击烧录即可。
3.5.常见问题整理
(1)串口设备打开失败?
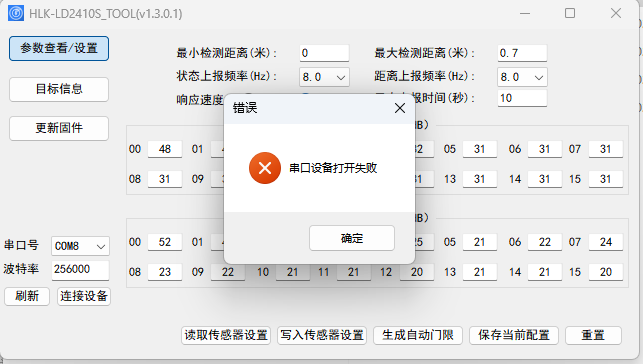
解决方法:
a.检查串口号,波特率是否有选对。默认波特率为115200。
b.检查接线是否接错,TX,RX是否有反接。
c.第三方串口工具和上位机不能同时使用,打开上位机时需要把第三方串口工具关闭。
d.可能模块接线松动,可以重新拔插下串口小板,再重新打开上位机。
(2) 写入/读取参数失败?

解决办法:上位机工具使用错误,2410S的上位机和2420的上位机有许多用户都会混淆,遇到这种情况需要先确认手上的模块是哪款模块,一般模块上会有丝印可以辨别。
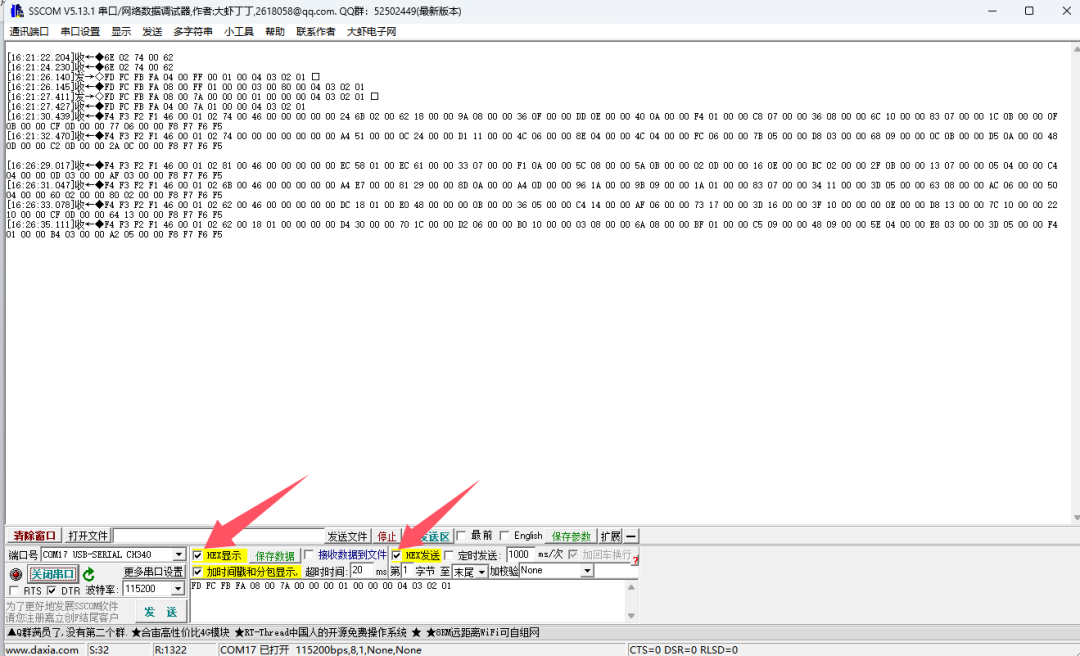
(3) 如何切换标准数据模式和解析标准数据?
a.发送使能配置命令:FD FC FB FA 04 00 FF 00 01 00 04 03 02 01
b.发送切换标准数据命令:FD FC FB FA 08 00 7A 00 00 00 01 00 00 00 04 03 02 01
(4) 如何解析标准数据?
[1007.176]收←◆F4 F3 F2 F1 46 00 01 02 69 00 46 00 BC 1B 00 00 66 3B 00 00 0E 0D 00 00 F4 01 00 00 9C 01 00 00 64 00 00 00 64 00 00 00 DF 00 00 00 3C 01 00 00 5C 03 00 00 9C 01 00 00 D8 02 00 00 90 01 00 00 3C 01 00 00 58 02 00 00 84 03 00 00 F8 F7 F6 F5
帧头:F4 F3 F2 F1
帧内数据长度:46 00
数据类型:01
目标状态:02
目标距离:69 00
保留位:46 00
各距离门能量值
0号门能量值:BC 1B 00 00 计算方式如下:

1号门能量值:66 3B 00 00 2号门能量值:0E 0D 00 00
3号门能量值:F4 01 00 00 4号门能量值:9C 01 00 00
5号门能量值:64 00 00 00 6号门能量值:64 00 00 00
7号门能量值:DF 00 00 00 8号门能量值:3C 01 00 00
9号门能量值:5C 03 00 00 10号门能量值:9C 01 00 00
11号门能量值:D8 02 00 00 12号门能量值:90 01 00 00
13号门能量值:3C 01 00 00 14号门能量值:58 02 00 00
15号门能量值:84 03 00 00
帧尾:F8 F7 F6 F5
四.LD2410S模块调试参数
4.1.使用自动生成门限调整参数
(1)使用上位机自动生成门限
保持探测范围内无人,开始生成自动门限,生成门限的参数默认不修改,120s后参数生成会自动修改。

(2)使用串口指令自动生成门限
依次发送下面的三条指令,注意发送使能配置后,需要在3s内发送下一条指令,否则无效。
FD FC FB FA 04 00 FF 00 01 00 04 03 02 01(使能配置指令)
FD FC FB FA 08 00 09 00 02 00 01 00 78 00 04 03 02 01(生成自动门限指令)
FD FC FB FA 02 00 FE 00 04 03 02 01(关闭使能配置指令)
4.2.微调参数
此处的微调参数是在自动生成门限之后的基础上去微调,根据上述对触发门限和保持门限的理解,相应的去调整触发门限和保持门限的值。
(1)容易误触时调高触发门限的值。
(2)难触发时,调低触发门限的值。
(3)保持不住时可适当延长无人上报时间和调低保持门限的值
(4)一直保持有人时可适当调高保持门限的值。
-
测试
+关注
关注
8文章
5415浏览量
127214 -
接线
+关注
关注
29文章
730浏览量
33346 -
雷达
+关注
关注
50文章
2975浏览量
118156
发布评论请先 登录
相关推荐
s3c2410中文资料下载
纳米软件科普:一些关于S参数常见问题的问答
HLK-LD2410B和HLK-LD2410C雷达模块功能更新支持APP OTA升级光敏固件
24G超低功耗雷达模块LD2410S功耗实测


超低功耗人体存在毫米波传感器LD2410S测试

手把手教学!HLK-LD2410B/C新手必看攻略!测试教程、模块调参一文详解~

LD2410B/C新手必看攻略! 测试教程、模块调参一文详解~





 工商网监
工商网监
评论