 环路补偿原理及为什么要环路补偿
环路补偿原理及为什么要环路补偿
1.概述
以前在电源公司时,老的工程师经常说电源动态响应不行调调loop gain,然后一脸懵,啥是loop gain(说的就是环路补偿)?看到他们设计的电路当时觉得好难好复杂,一直觉得电源设计最难的是环路设计和PCB设计。
既然这次赶鸭子上架,我就来好好总结下,后续也会对PCB布局布线进行总结,当然完整设计的工程经验少,不足的后续在成长中继续补充。
2.什么是环路补偿?
这涉及到自动控制原理。首先说几个概念。
开环:指信号从输入直接到输出
闭环:指信号从输入到输出后,又反馈到输入。
传递函数:输出Vout/输入Vin,后续简称传函
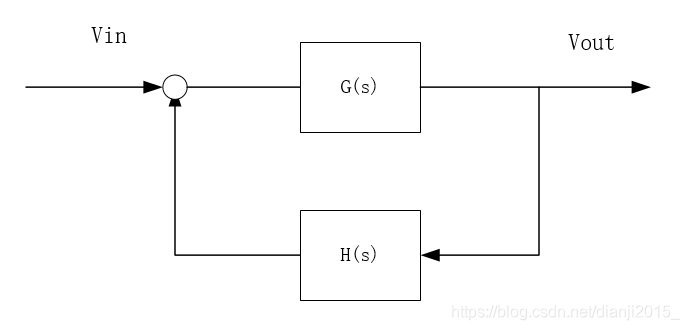
开环传递函数:闭环系统中,开环传递函数是指,断开反馈后,正向传递函数G(S)*反馈传递函数H(S)
闭环传递函数:G(s)/(1+G(s)*H(s))
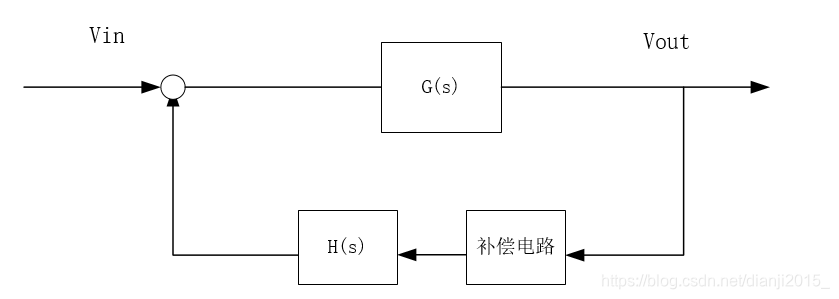
环路补偿指的是,在闭环系统中,在反馈上加入一种电路,用来补偿系统在扰动时的性能不足,从而维持系统的稳定或者较优的状态。补偿电路一般是运放和电阻电容组成的电路。
3.为什么要环路补偿?
3.1环路补偿原因
对于电源而言,引起输出变化的两个因素主要是,输入和负载的变化。而这两者的变化,有可能导致输出不稳定,例如输出电压震荡剧烈或者在一定的时间内无法回到额定输出电压,这对电源来说都是致命的危害,所以要进行环路补偿,使其面对外界干扰时可以无坚不摧。
总结来说,进行环路补偿有以下两个原因:
从稳态考虑,希望输入和负载变化时,输出能回到稳定值
从动态考虑,系统系统在受到干扰后,能快速回到稳定值,并且超调值在可接受的范围内。
3.2环路稳定依据
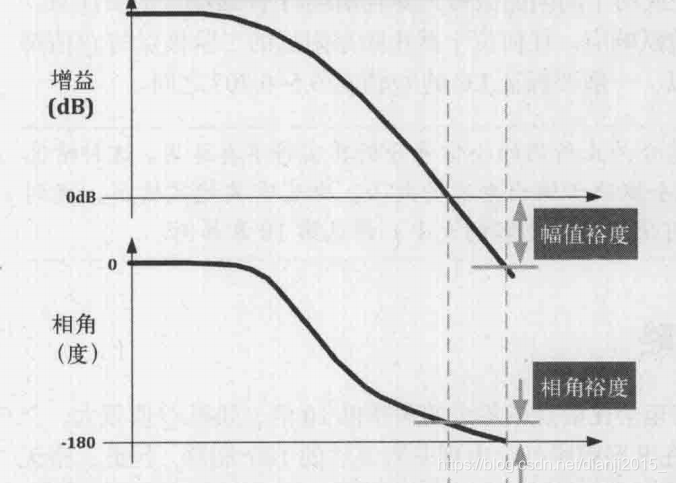
以上又涉及到下面几个概念。相位裕量和幅值裕量主要表征的是稳态,带宽主要表征的是动态。
幅值裕量:当相位为-180°时,开环增益与0dB的差,一般电源要求《-10dB。
相位裕量:开环增益为1,即0dB时,对应的相位与-180°之差。考虑到元件容差以及温度对系统影响,一般要求》45°,相位裕量过低会欠阻尼,过高,会过阻尼。
幅值裕量一般与相位裕量相对应,-10dB对应60°。
这里想顺便介绍下,为什么相位裕量越大,系统震荡越小,反应越慢?这涉及到阻尼的概念。
回到自动控制原理。以二阶系统为例说明。

阻尼有以下几种情况
《0,单位阶跃响应不稳定,即响应发散
在(0,1)范围内,有一对负实部共轭复根,单位阶跃响应系统震荡
=1,临界阻尼,单位阶跃响应无震荡稳态输出
大于1, 过阻尼,单位阶跃响应响应缓慢
二阶系统的开环传递函数如下

从上式可以看出,相位裕量越大,阻尼越大,所以系统响应越缓慢。
带宽:幅频特性下,0频率和幅值下降3dB的频率之间的宽度。带宽越宽,跟踪控制信号的能力越强,表示反应速度越快。
穿越频率:开环增益曲线穿过0dB的频率点。一般选择为开关频率的1/5-1/10.
那么问题来了?为何比较点是增益为0dB,相位为-180°?
我们来看闭环的传函
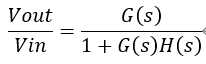
分母为0时,传函无穷大。在这种情况下,一个固定的输入导致输出无穷大,这对实际系统来说,太可怕,这种情况下,系统就是不稳定的。分母为0要保证以下两点
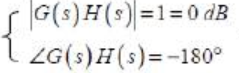
而进行环路补偿的目的,就是保证以上两个条件永远不能满足。
4.如何进行环路补偿?
4.1 补偿器的特点
上一节说明了补偿器的根本目的,就是保证开环传函的分母永远不能为0,也就是说增益要尽可能的远离0dB,相角要尽可能的远离-180°。
补偿器的目标:
穿越0dB时,斜率为-1,这个可保证环路带宽不至于过小。
抵消电容ESR带来的影响
高频要衰减的足够快,用来抑制高频噪声
增益要足够大,使得系统调节的快,且稳态精度小
提高系统的阶数,消除稳态误差
所以一个成熟的开关电源补偿器应该包括以下几点:
一个为0的极点,简称零极点。作用是相当于加入积分器,可保证增益。
两个零点,位于LC双极点的附近,用来抵消LC极点带来的影响
一个极点,位于电容ESR带来的零点处,用于抵消ESR带来的影响。因为电容ESR带来的影响不是固定的,会受外界因素的影响,所以需要抵消其影响。
一个高频极点,用来让高频信号衰减的更快。
什么时候抵消零点,什么时候抵消极点,抵消哪种零点和极点,为什么要这样抵消?
为了弄清楚以上问题,我们必须明白零极点对系统带来哪些影响。
4.1.1 极点的影响
极点:开环传递函数中,分母为0的点。
极点对传函的影响如下:
每增加一个极点,相位就减小-90°。我们平时见的低通滤波器就是单极点系统。
影响特征根,对应运动模态
导致增益下降
4.1.2 零点的影响
零点:开环传递函数中,分子为0的点。
极点对传函的影响如下:
每增加一个极点,相位就增加+90°。
影响运动模态对应的比例
导致增益上升,系统响应加快。
零极点的影响导致了在低频时增益大,高频时增益小,所以增益曲线呈下降趋势,可以看成一个低通滤波器,这也可以与穿越频率决定环路响应快慢对应起来,因为穿越频率越大,输入信号通过的频率越多,越能还原原本的波形,所以响应快。
4.2 补偿器的分类
补偿器一般有三种:单极点补偿,双极点单零点补偿,三极点双零点补偿。极点数总是多于零点数,这样可提高系统的阶数,保持稳定。
1. 单极点补偿(type I)
传递函数如下:
2. 双极点单零点(type II)
适用于功率部分只有一个极点的补偿。如:所有电流型控制和非连续方式电压型控制。
3. 三极点双零点(type III)
适用于输出带LC谐振的拓扑,如所有没有用电流型控制的电感电流连续方式拓扑。

4.3 buck电路的环路设计
设计环路的基本步骤如下:
根据已知参数确定功率级传函
确定穿越频率(一般为开关频率的1/10)
确定补偿器的类型
计算电阻电容参数
下面对两种控制型的buck电路环路进行设计介绍。
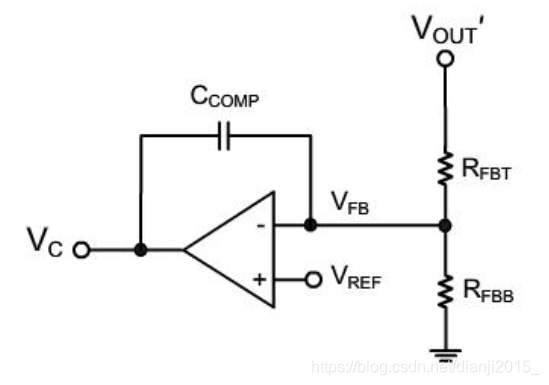
4.3.1 电压控制型
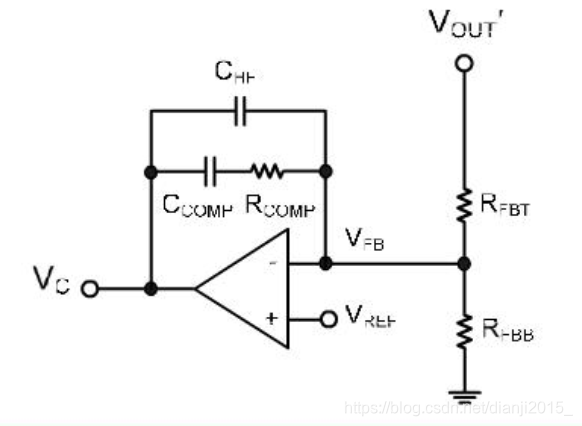
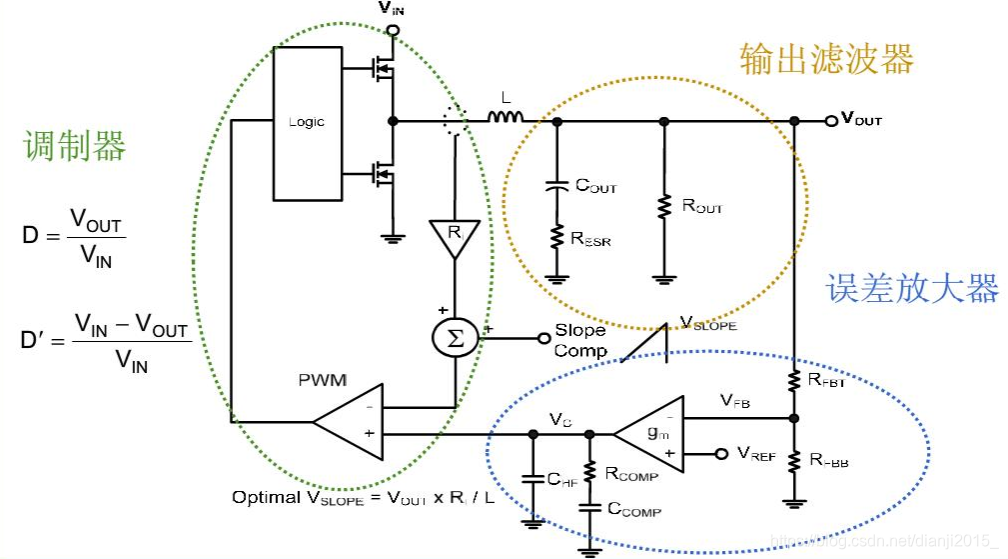
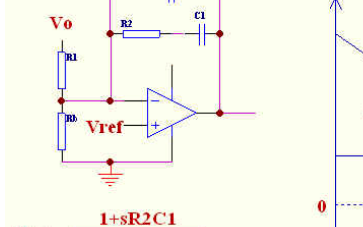
电压控制型buck电路是指,用buck的输出电压作为反馈,进行比较后产生PWM波。一般采用typeIII补偿器进行补偿。
下面是电压型buck电路的原理框图,包括pwm产生电路,主功率电路,输出滤波,误差放大器。
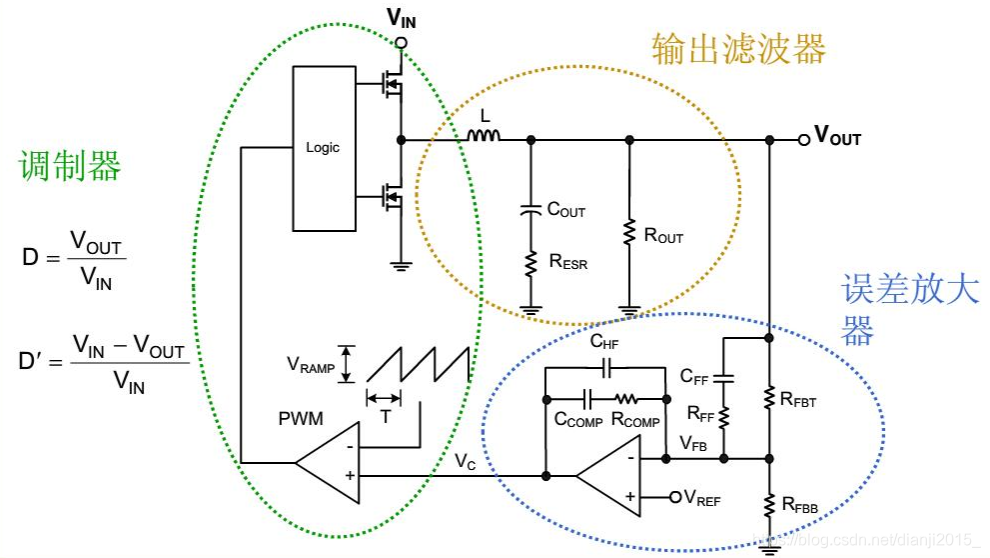
PWM产生电路的传递函数为Gpwm=D/Vcomp:
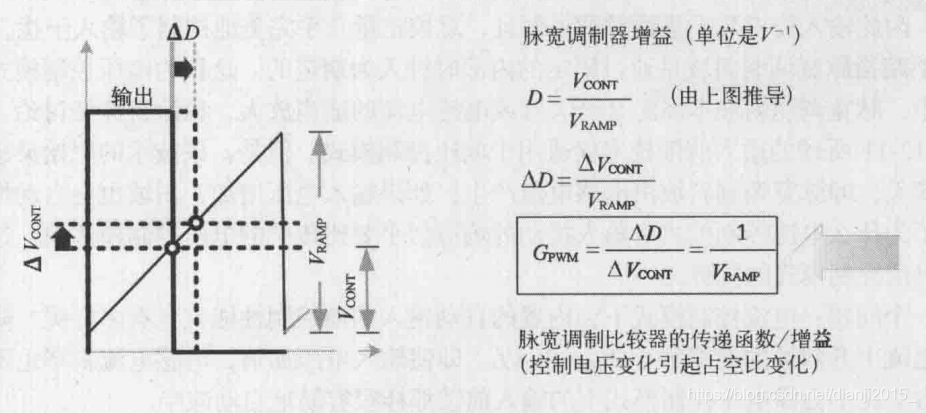
Vram是三角波的峰峰值。
主功率电路的传函为:Vo/D=Vin
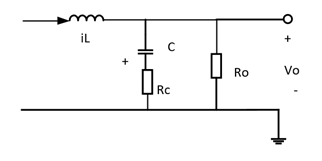
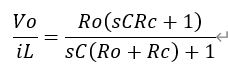
LC滤波电路(加上电容的ESR)的传函为:
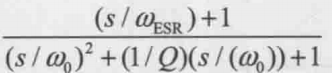
电容的ESR带来的零点频率为Wesr=1/(ESR*C)
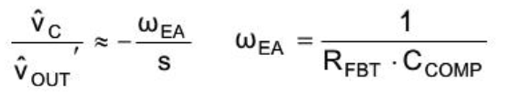
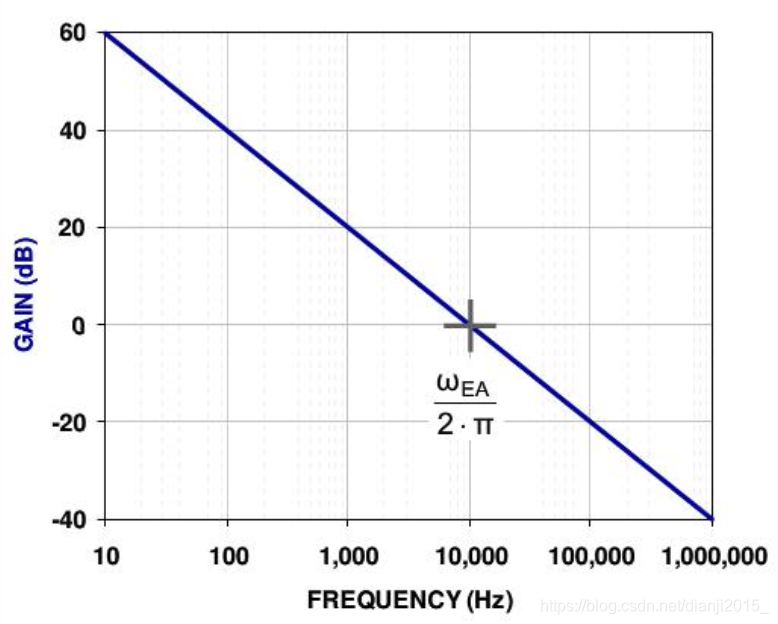
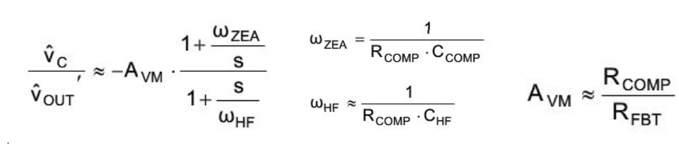
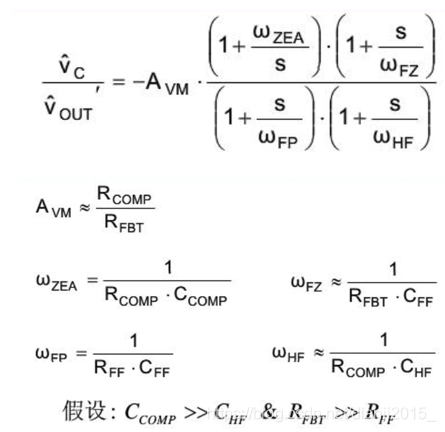
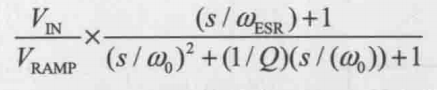
所以从误差放大器出来到Vo的传函为:
下面进入误差放大器的设计。
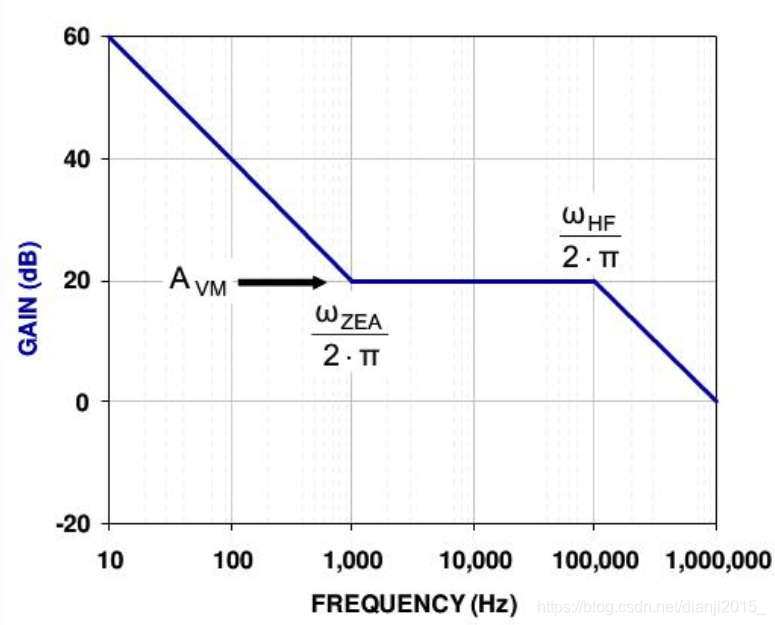
1)求出原传函的零极点
2)确定穿越频率为开关频率的1/10
3)让补偿器的零点等于传函的LC极点,选择合适的电阻电容
4)让补偿器的某一极点等于电容esr带来的零点,确定电阻电容
5)高频极点为穿越频率,确定电阻电容
6)重新求相位裕量以及幅值裕量
4.3.2 电流控制型
电流型buck电路是指,不仅采用电压作为电压负反馈,而且还要电感电流(一般是峰值电流)作为电流反馈,由于是电感电流,所以少了一个L带来的极点,一般采用typeII型补偿器进行补偿。
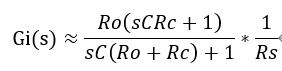
PWM产生电路的传递函数:Vc/iL=Rs,Rs为mos电流的采样电阻
主功率回路+滤波电路传函:
所以从电压误差放大器出来的传函为
接下来的误差放大器的设计步骤,与上一节电压控制型误差放大器设计步骤一致。
电流型buck的优点是补偿电路简单,响应快,但是缺点是容易出现次谐波震荡,需要加入斜坡补偿。
下面介绍次谐波震荡和斜坡补偿。
(1)次谐波震荡
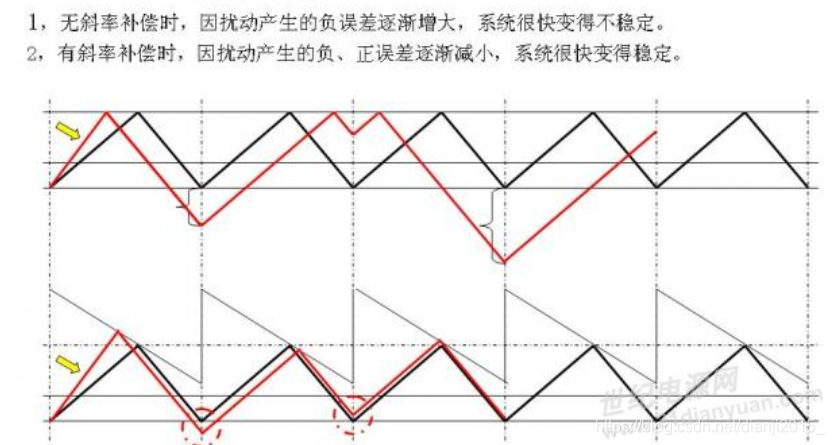
次谐波震荡:一般出现在电流控制模式下,电流连续且占空比大于50%,出现1/2的频率。
产生原因:占空比大于50%后,电流上升时间大于下降时间,使得还未下降到初始值就进入电流上升期,由于到达峰值电流时间短,所以占空比缩小,这样看起来出现大小波的情况,也就是次谐波。若出现扰动,系统会不稳定。
这样看来,重载比轻载容易出现次谐波振荡,因为同样输入条件下,重载要的占空比大。

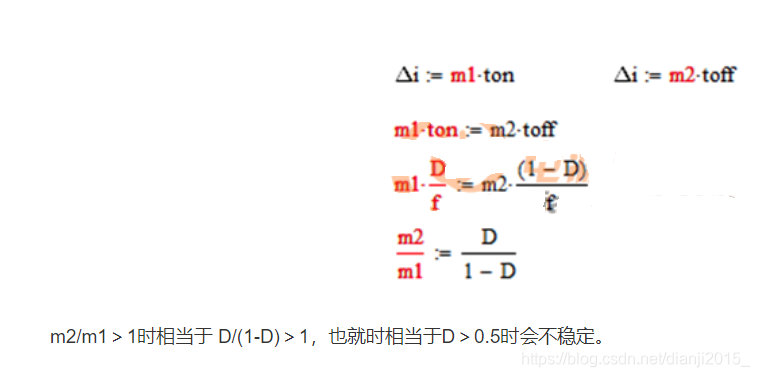
要求电流上升斜率大于下降斜率,否则会不稳定,推论如下,m1是电感电流的上升斜率,m2是电流的下降斜率
(2) 斜坡补偿
在电流上叠加一个负的固定斜坡的电流,减少电流环在1/2谐波的增益。实质是使得电流控制模式看起来更像电压控制模式,因为电压控制模式就是采用固定斜坡的锯齿波。
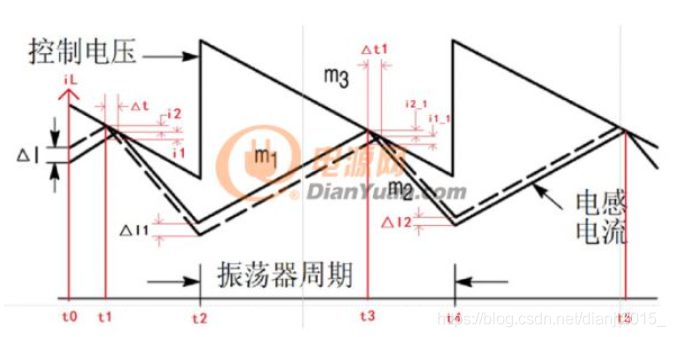
如上图所示,在控制电压上,叠加一个下降斜率为m3的斜坡,这会使得电流上升时间缩短,下降时间延长,只要保证m3》m2/2系统就能稳定。为了方便,在buck电路中,选择m3=m2=Vo/L
斜坡补偿后,偏差会越来越小。
-
传递函数
+关注
关注
0文章
102浏览量
14061 -
补偿器
+关注
关注
0文章
86浏览量
14246 -
环路补偿
+关注
关注
2文章
42浏览量
6249
原文标题:环路补偿介绍
文章出处:【微信号:mcu168,微信公众号:硬件攻城狮】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
开关电源环路补偿讲解之开关电源反馈环路如何调试设计分析集合分享








 工商网监
工商网监
评论