 Nat. Commun.:受象鼻鱼启发的电子皮肤,用于主动非接触式三维跟踪和传感
Nat. Commun.:受象鼻鱼启发的电子皮肤,用于主动非接触式三维跟踪和传感



第一作者:Jingkun Zhou,Jian Li,Huiling Jia,Kuanming Yao
通讯作者:Xinge Yu
通讯单位:香港城市大学
DOI:10.1038/s41467-024-54249-3
背景介绍
皮肤是大多数生物物种最大的器官之一,具有多种基本功能,如保护、感觉、调节温度、储存能量、营养合成和免疫。在自然界中,各种动物的皮肤都具有许多令人着迷的能力。象鼻鱼是弱电鱼的一个超家族,能够利用电场主动探测猎物。通过皮肤,它们可以感知周围环境,并对猎物进行三维 (3D) 定位,即使猎物隐藏在泥浆下。
近年来,机器人技术和虚拟/增强现实 (VR/AR) 的快速发展导致对轻便、便携式传感器的需求增加,这些传感器能够以非接触方式精确感知 3D,以便在各种应用中实现沉浸式 3D 内容。柔性电子技术的进步使得电子皮肤 (E-skin) 能够以薄而软的形式开发出来,从而最大限度地与人体皮肤或机器人相符,实现共形集成。这一重大进展不仅为电子皮肤实现触觉/反馈的人机界面 (HMI)开辟了新的可能性,还为持续健康监测开辟了新的可能性,例如心电图 (ECG)、汗液和其他生理信号。然而,现有的电子皮肤面临几个限制:(i) 手势识别能力有限,因为设备基于惯性传感器、应变传感器、超声波或心电图 (EMG) 信号,只能识别少数特定手势;(ii) 通常涉及庞大的处理系统,因为最先进的技术基于成像器、磁场、射频或静电理论。
具有主动感知能力的象鼻鱼皮肤可能为新型电子皮肤提供良好的启发,该电子皮肤能够实现非接触式、高集成度的精确三维空间定位,这是一个尚未探索的课题。象鼻鱼尾部的发电器官通过切换离子通道来控制钾离子和钠离子跨细胞膜的迁移,从而使发电器官放电并发出电脉冲。具体来说,象鼻鱼有两种类型的结节性电感受器,即象鼻鱼桅杆和诺伦器官,它们可以检测不同频率和强度的电信号。因此,它们可以感知周围物体引起的电场扭曲,从而瞄准猎物。
本文亮点
1. 本工作报告了一种非接触式位置定位概念,该概念由具有三维传感能力的透明薄软电子皮肤 (E-skin) 实现
2. 受象鼻鱼主动电感应的启发,这种电子皮肤可以以非接触方式主动确定目标物体的 3D 位置,并可以实时将相应位置无线传送到其他设备。
3. 这种电子皮肤可以轻松实现与机器的交互,即在虚拟或实际的 3D 空间中操纵虚拟物体、控制机械臂和无人机。
4. 它可以与机器人集成,为它们提供 3D 态势感知,以感知周围环境、避开障碍物或跟踪目标。
图文解析
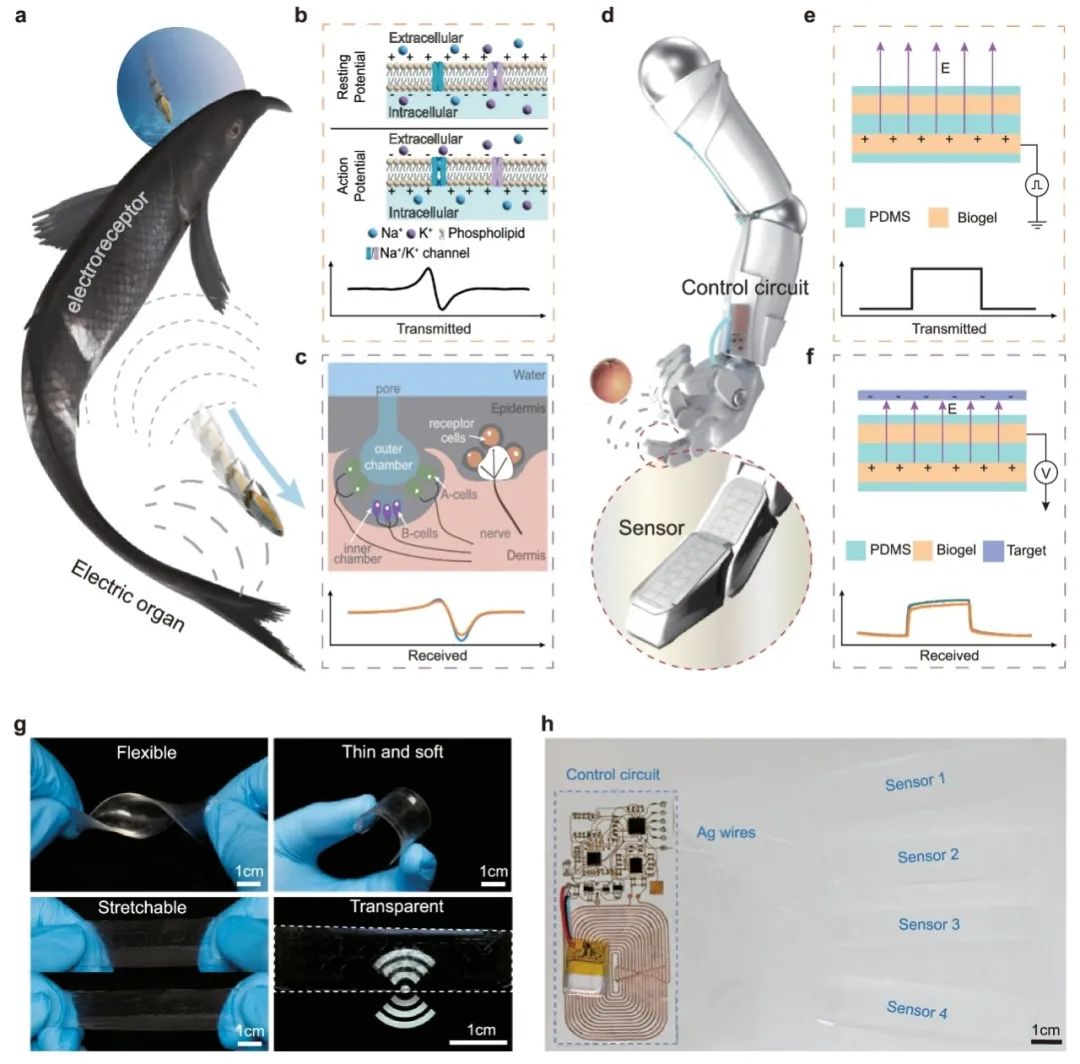
图1. 仿生透明电子皮肤。
a 象鼻鱼使用其电器官和电感受器来检测猎物。b电动琴的工作机构。c 象鼻鱼的两种类型的结节性电感受器,壶腹器官(左)和球状器官(右)。d 使用电子皮肤检测目标的机器人示意图。e 发射电极的工作机制。f 接收电极的工作机制。g 传感器的光学照片展示了其柔韧性、薄度和柔软性、拉伸性和透明度。h 带有离散传感器的设备的光学照片。
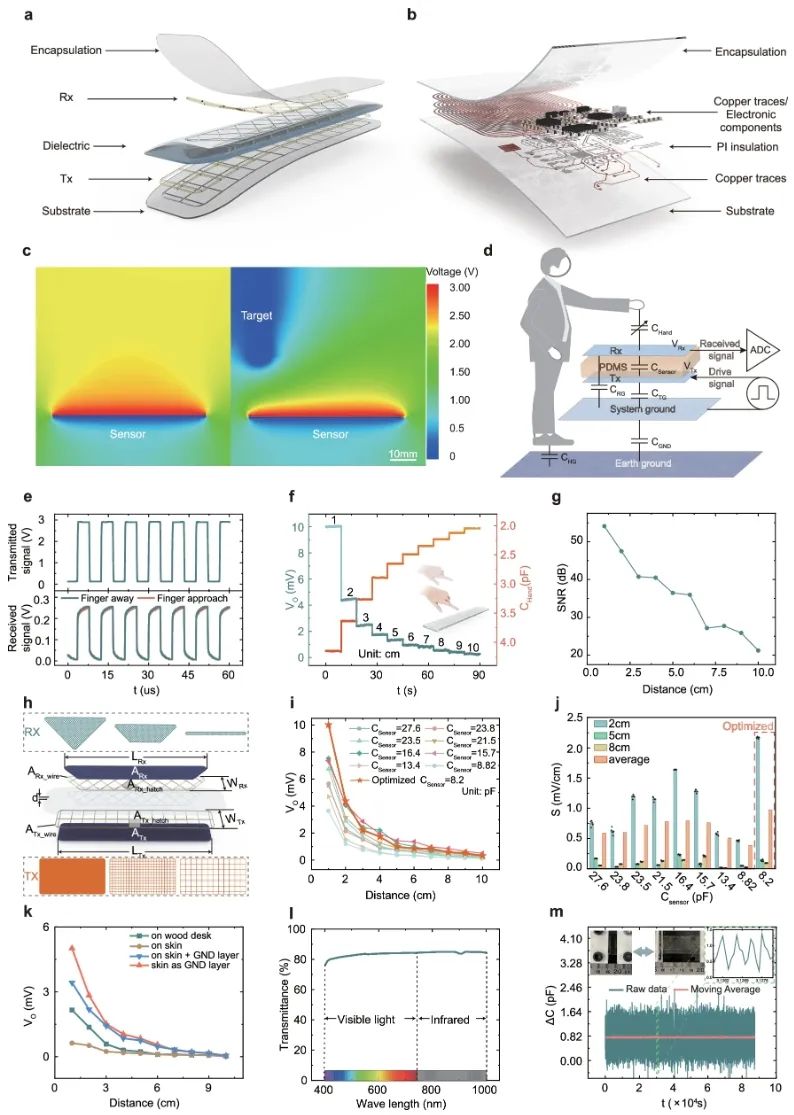
图2. 电子皮肤的特点。
a E-skin 传感器模块的分解示意图。Rx,接收器;Tx,发射机。b E-skin控制电路模块的分解示意图。ADC,模数转换器。c 模拟目标对静电场的影响。d E-skin 的等效电路模型。e Tx 电极发射的信号和 Rx 电极接收的信号。f CHand 和 VO 在手指和传感器之间的不同距离处。g 距传感器不同距离处传感器的 SNR。h 待优化参数示意图。(i) 具有不同电极设计的传感器的响应和 j 灵敏度,以及优化电极的结果。条形高度,平均值;误差线,s.d.;n = 5个独立样本。k 皮肤和两种屏蔽方案对传感器性能的影响。l 传感器在400-1000 nm波长下的透过率,8800次折叠和展开时的电容变化以及100点移动平均曲线以查看整体变化趋势。
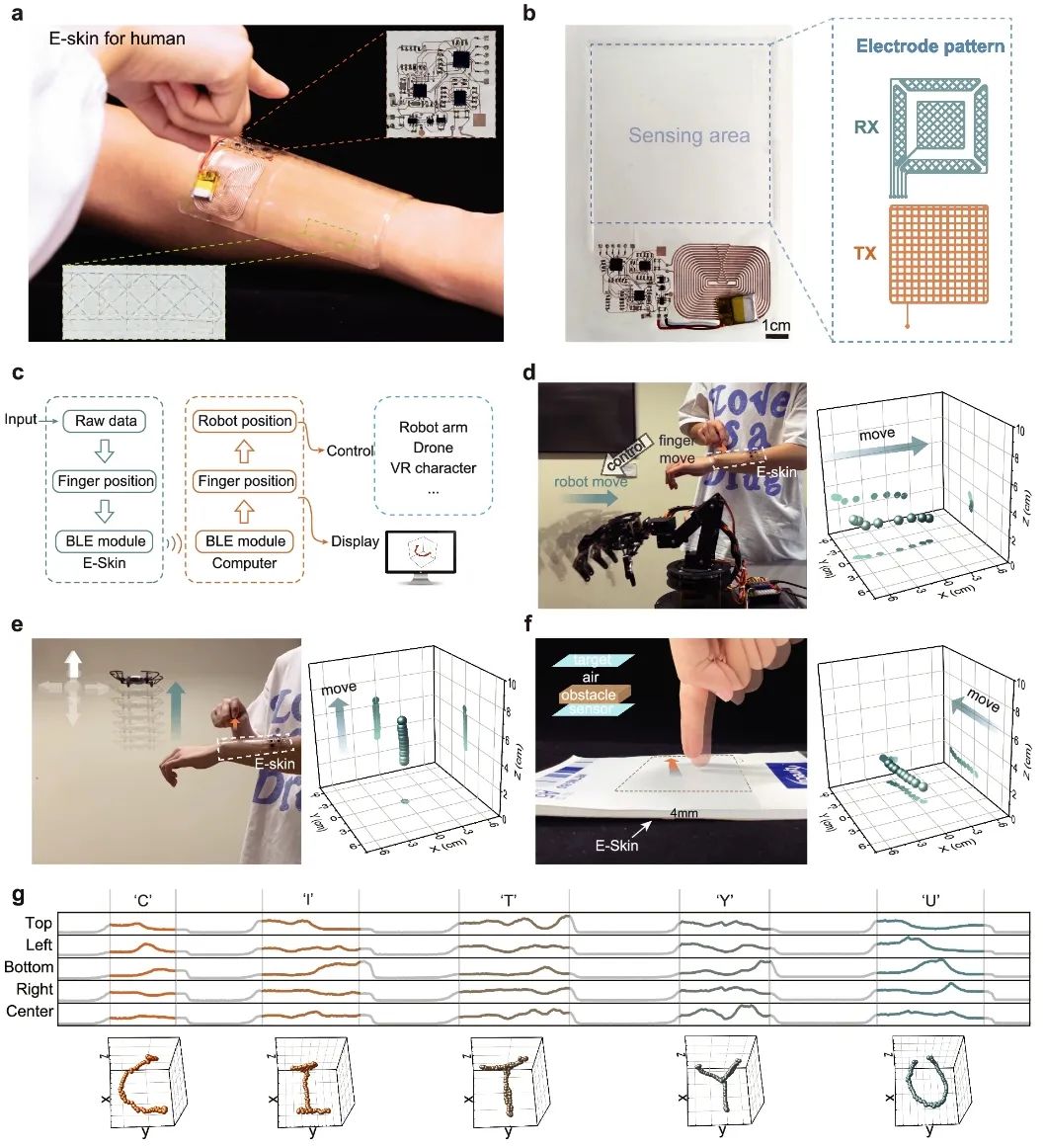
图3. 非接触式人机界面。
a 手臂上佩戴的电子皮肤的照片。b 整个电子皮肤和右侧电极图案的照片。c 使用电子皮肤的人机交互流程图。d 使用E-skin控制机械臂向右运动以及E-skin收集的数据照片。e 使用电子皮肤控制无人机向上飞行。f 即使有障碍物遮挡,电子皮肤也能正常工作。g 在空中写下“CITYU”五个字母、五个Rx电极接收到的原始数据以及算法计算出的图像。源数据作为源数据文件提供。

图4. 机器人传感。
a 用于机器人感知的电子皮肤示意图。b 在无人机上安装电子皮肤以避障的照片。c 无人机避障原理示意图。d 无人机避障照片及实时数据。e 在机械臂上安装电子皮肤以进行物体跟踪的照片。f 用于目标跟踪的机械手流程图。g 机械手执行目标跟踪的照片以及机械手在空间中的 3D 坐标。

图5. 使用机械臂抓取目标的演示。
a 操作员通过观看屏幕上的流媒体视频远程控制机械臂,在没有电子皮肤辅助的情况下,操作员仅依靠视频分析来确定机械臂的位置,需要尝试三次才能成功抓住橙子;b 在电子皮肤辅助下,当操作员按下抓取按钮时,机械臂会自动微调其位置,将物体对准两根手指的中心,然后再继续抓取过程。c 通过将红外传感器和电子皮肤集成到机器人手的手指上,电子皮肤充当灵活的界面,具有增强的摩擦力和传感能力,弥补了红外传感器的局限性。右侧显示机械手运动过程中的红外传感器和电子皮肤数据。结果表明,电子皮肤可以检测周围区域的物体,并且近距离无盲区,能够实现与目标物体的精确距离检测。源数据作为源数据文件提供。
视频2.
视频3.
视频4.
视频5.
视频6.
视频7.
视频8.
视频9.
您对本文有什么看法?欢迎留言分享!
顺手转发&点击在看,将中国传感产业动态传递给更多人了解!
星标的内容=你在乎的内容,根据微信公众号推荐原则,没有在传感器专家网公众号主页【设为星标】,将无法及时获得传感器行业最新资讯!




原文标题:Nat. Commun.:受象鼻鱼启发的电子皮肤,用于主动非接触式三维跟踪和传感
文章出处:【微信公众号:传感器专家网】欢迎添加关注!文章转载请注明出处。
-
传感器
+关注
关注
2578文章
55811浏览量
795381
发布评论请先 登录
三维力传感器工作原理及应用领域是什么样的,在未来市场是占据怎么的地位?
VirtualLab:光学系统的三维可视化
电子科技大学:研究用于机器人仿生皮肤的三维可拉伸触觉传感器

非接触式磁编码传感技术及误差补偿原理
风力发电机叶片的磨损、裂纹的光学三维扫描测量逆向-激光三维扫描仪

【OFDR】实时感知、动态重构与历史状态回溯!昊衡科技-三维场重构软件

昊衡科技 多芯光纤三维形状传感系统,精准感知!
东莞静态螺纹钢测量仪 线下非接触式测量
OFDR技术与三维重构的协同价值

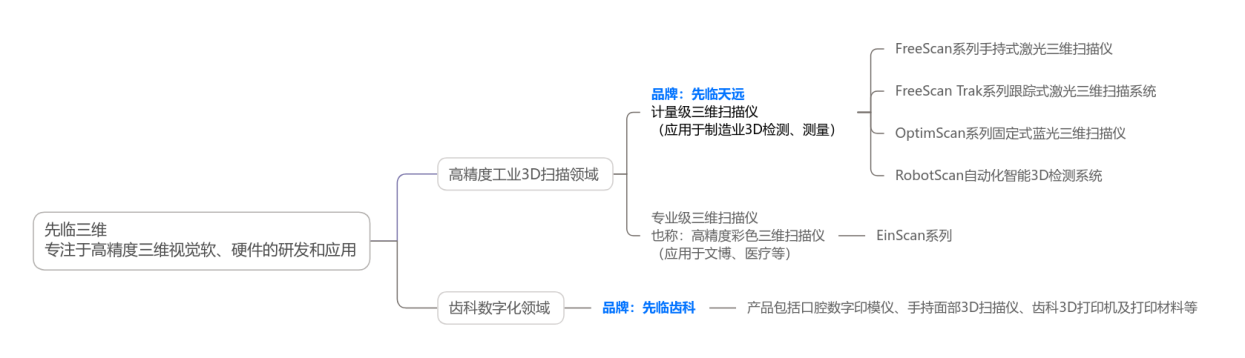
一文读懂 | 三维视觉领域国家级制造业单项冠军——先临三维的品牌布局
XenG202G | 挥手手势识别参考设计(三维)

非接触式激光三维扫描应对镜面反射表面的无喷粉测量方案:原理与创新
新品发布 | ZEISS ARAMIS 1三维应变光学测量系统全新发布:开启非接触式动态测量新时代




评论