 舱驾融合一体化测试解决方案
舱驾融合一体化测试解决方案
作者 |ktw624
小编 | 不吃猪头肉舱驾融合通过软硬件的深度整合,实现了架构简化、成本优化和性能提升,是智能汽车发展的必然趋势。然而,这种融合也带来诸多测试挑战:ASIL B/D不同安全等级的功能共存、跨域资源协同调度、系统复杂度显著提升等。研发测试过程中,为保证系统的功能正确性、系统稳定性及可靠性,需要构建一套完整的测试体系。为此,北汇信息推出一套系统仿真测试设备,用于应用功能的测试验证,结合OS评测工具,实现测试用例与场景库的对齐,评估场景驱动下的性能覆盖指标。

舱驾融合的发展背景
随着汽车产业智能化转型提速,智能驾驶和智能座舱已成为行业发展重点。智能驾驶技术(L2级辅助驾驶功能)已逐渐成为车辆标配,而更高级别的自动驾驶技术(如NOA)正在特定场景下快速渗透;智能座舱则集成了先进的人机交互技术,如AR/VR、语音识别和人工智能,提供更加个性化和智能化的驾乘体验。
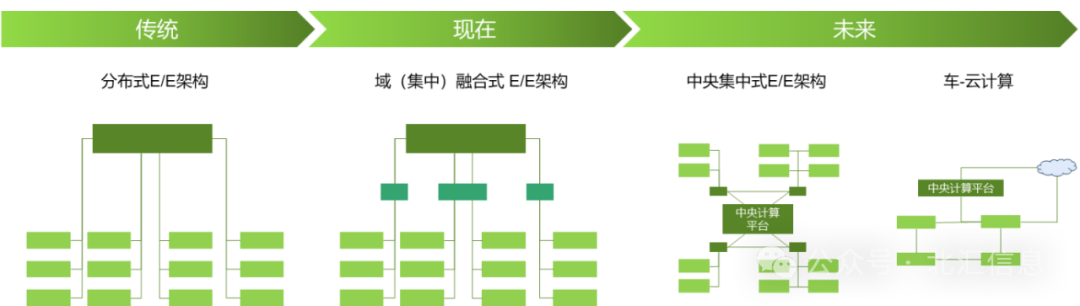
图2 架构演进趋势
传统的分离式架构逐渐无法满足日益增长的用户需求和技术发展要求,汽车E/E架构从传统的分布式架构正在向域融合、中央集中式加快演进,架构更加模块模块化、可拓展的同时,软件和硬件不断融合,舱驾融合应运而生。
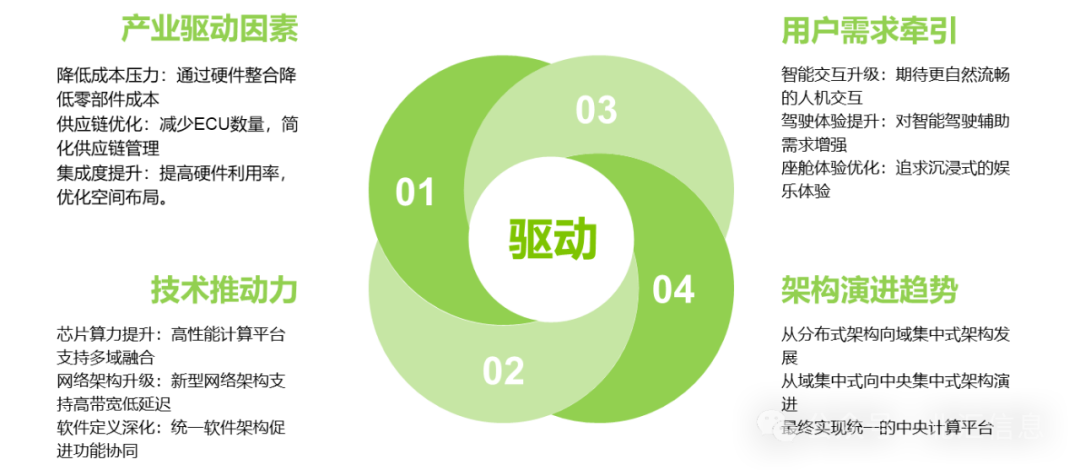
图3 舱驾融合的驱动力

舱驾融合技术发展阶段
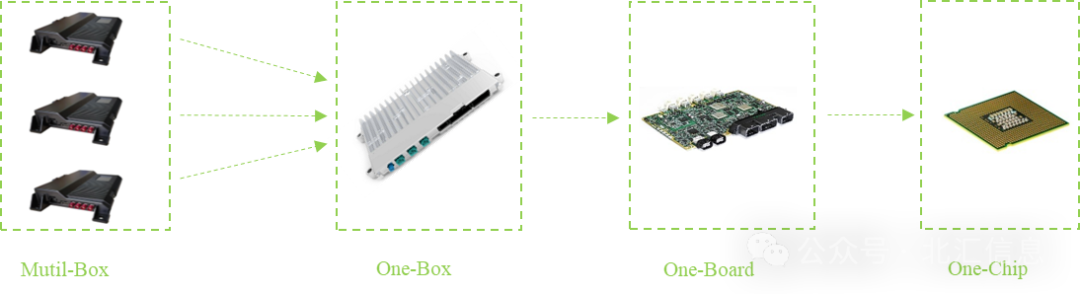
图4 舱驾融合技术发展阶段
舱驾融合的发展经历了从表层到深层、从部分到整体的演进过程,主要分为以下三个阶段:
域控硬件融合(One-Box)
座舱域和智驾域的板子独立封装在一个域控制器中
功能逻辑相对独立
实现基础的硬件整合,降低成本
PCB板级融合(One-Board)
在单一PCB板上同时集成座舱和智驾芯片
提高集成度,优化空间利用
资源共享程度提升
进一步降低系统复杂度
芯片级融合(One-Chip)
使用单一SoC实现所有功能
统一软件架构设计
深度资源共享与调度
实现真正的舱驾一体化

舱驾融合面临的挑战
舱驾融合在推进过程中面临着多维度的技术挑战。从硬件层面来看,随着集成度的提升,系统的功耗和散热要求显著提高,同时片内通信从有线到无线的演进也带来了新的技术门槛。在软件层面,挑战更为复杂:功能安全要求的差异性、平台兼容性问题、系统实时性要求、信息安全的挑战。
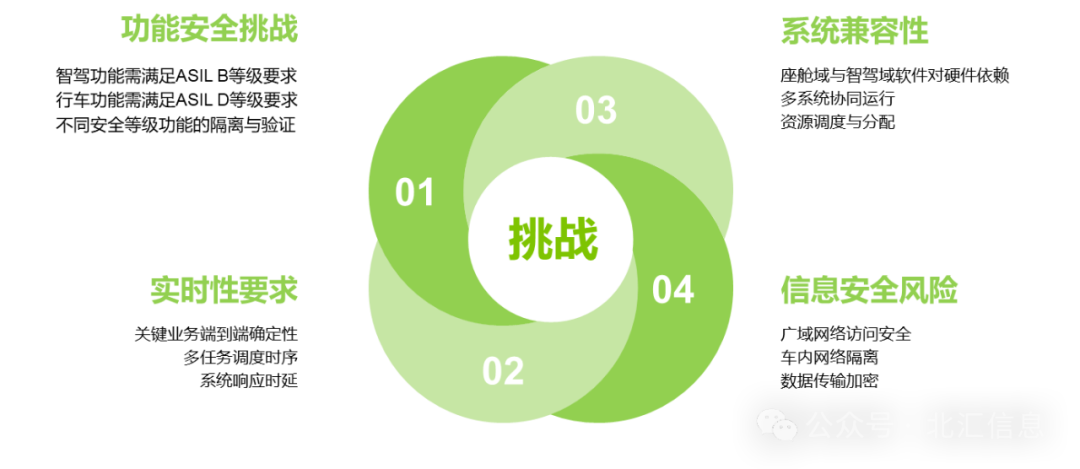
图5 舱驾融合的挑战
这些技术挑战的解决,需要从架构设计、开发工具、测试验证等多个维度同步推进,建立完整的技术解决方案,才能确保舱驾融合系统的可靠性和安全性。

舱驾融合一体化测试解决方案
智驾、座舱域底层软件、应用层软件的融合与解耦,对功能正确性、系统稳定性提出了更高的要求;为此,借助系统仿真测试设备,全面进行应用功能的测试验证,再结合OS评测工具,实现测试用例与场景库的对齐,评估场景驱动下的性能覆盖指标。
系统仿真测试
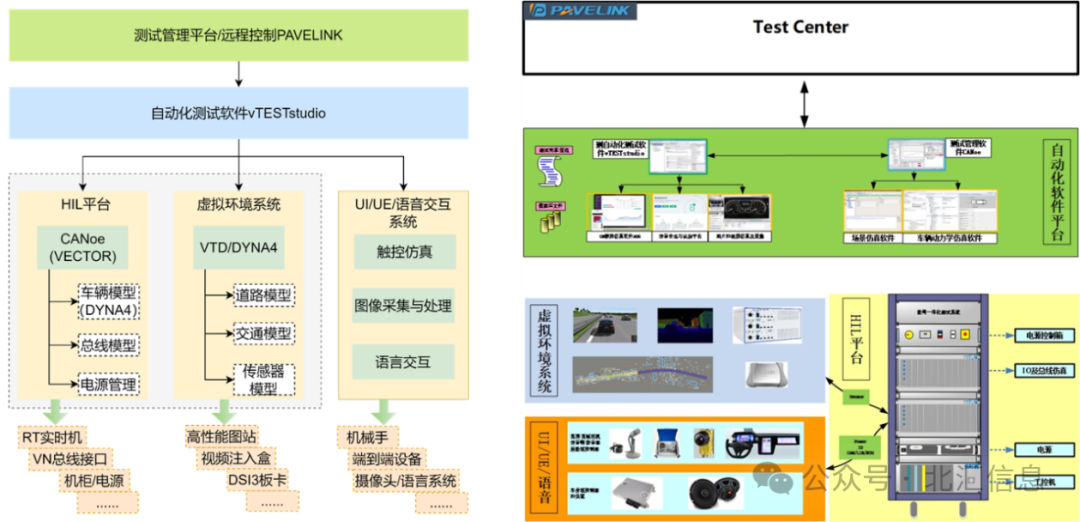
图6 系统仿真测试
对于舱驾融合一体化控制器,使用一套HiL硬件平台、仿真软件测试平台、结合传感器仿真专用设备及UI/UE测试专用设备,实现智驾、座舱功能的自动化测试。
测试管理平台/远程控制PAVELINK:北汇信息自主开发的一款云控平台,可实现自动化刷件、调用测试工程、调用测试脚本、上传测试报告、测试用例管理、设备状态监控等,持续集成、持续测试。(可适配用户的云控平台)
仿真软件测试平台:
自动化测试软件vTESTstudio:提供自动化仿真搭建、脚本执行和测试管理试验管理软件CANoe:提供HiL测试系统的管理及运行环境,可配置IO资源及故障注入
虚拟场景仿真软件VTD:提供道路交通模型、传感器建模(包括毫米波雷达、摄像头、超声波雷达以及激光雷达等)
车辆动力学软件DYNA4:提供车辆动力学模型
HiL硬件平台VT HiL:包括实时处理器、总线接口卡、通用IO板卡、故障注入板卡等
传感器仿真专用设备:视频注入板卡、DSI3仿真板卡、回波盒等
UI/UE测试专用设备:机械臂、语音嘴、扬声器、高清相机、ADB工具等
基于该套测试系统,可实现以下应用功能测试:
智驾功能测试:主动安全辅助功能、驾驶辅助功能(巡航、领航)、泊车辅助功能
座舱功能测试:人机交互页面响应、语言识别准确性、手势控制灵敏度等
跨域协同功能测试:驾驶信息同步、预警信息交互时序、环境感知识别显示、功能模式切换响应等
系统稳定性测试
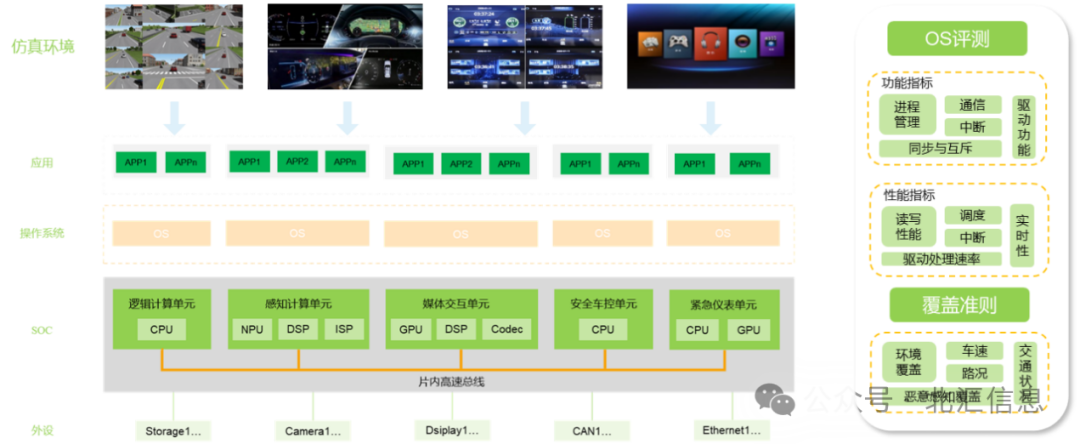
图7 稳定性测试

结语
舱驾融合是智能汽车发展的必然趋势,其测试验证的重要性不言而喻。通过系统化的测试方案和专业的工具平台,能够有效保障舱驾融合系统的可靠性和安全性,为智能汽车产业健康发展提供有力支撑。
-
测试软件
+关注
关注
2文章
49浏览量
13040 -
仿真测试
+关注
关注
0文章
81浏览量
11301 -
自动驾驶
+关注
关注
784文章
13784浏览量
166376
发布评论请先 登录
相关推荐
超融合一体机属于什么设备
物联网水肥一体化系统方案
《嵌入式机电一体化系统设计与实现》读后感
超融合一体机是服务器吗?与服务器有什么区别
超融合一体机是什么意思?有什么好处
宏景智驾与芯擎科技携手,实车验证“舱泊一体”创新方案
宏景智驾联合芯擎科技打造的“舱泊一体”方案完成实车验证
安消一体化平台建设方案
什么是机电一体化?它有哪些应用?
舱驾一体化对于国产算力芯片厂商的影响
什么是通感算一体化?通感算一体化的应用场景






 工商网监
工商网监
评论