 以太网IO控制卡:C#实时读写时间测试
以太网IO控制卡:C#实时读写时间测试
本文导读
今天,正运动小助手给大家分享一下 运动控制卡之ECI 0系列IO板卡的用法,并测试一下多个IO读写的速度。ECI其他系列IO板卡的输入输出使用也类似,读写速度也类似,可以供参考。
一、ECI0032/ECI0064 IO卡硬件介绍
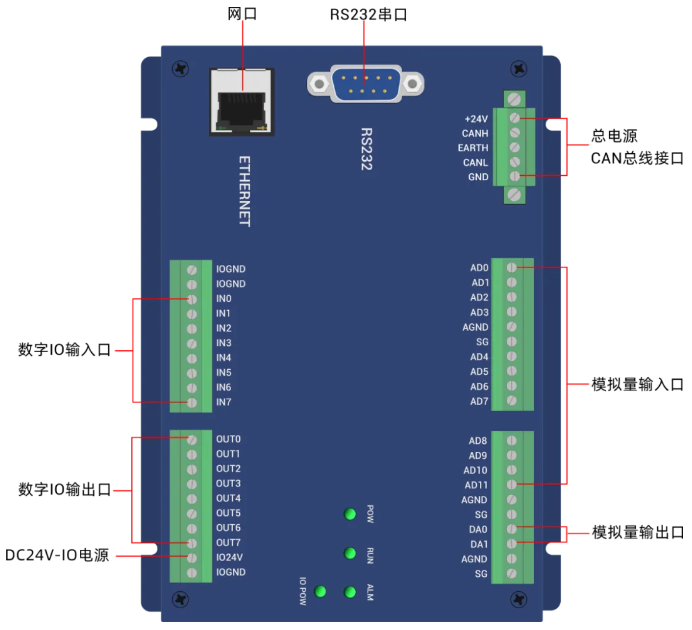
ECI0032/ECI0064等ECI 0系列运动控制卡支持以太网,RS232通讯接口和电脑相连,接收电脑的指令运行,支持ZCAN扩展,可扩展128路AD,64路DA;272路输入和272路输出。
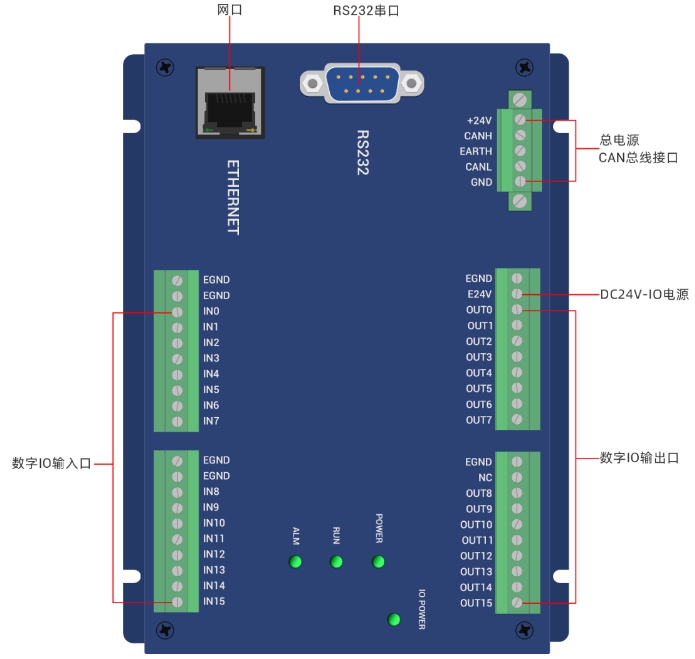
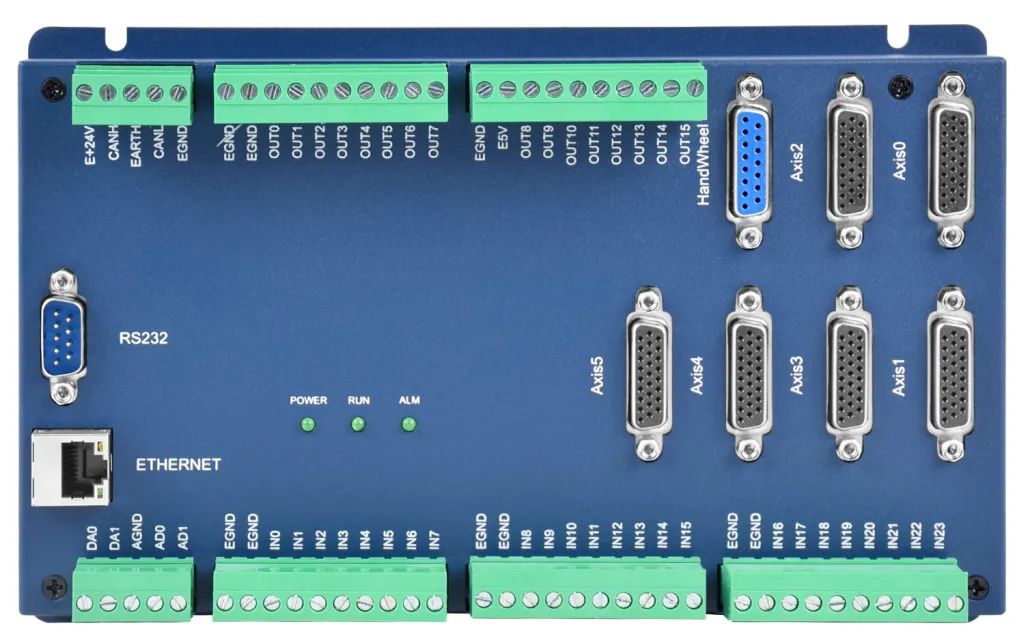
ECI0032 IO控制卡
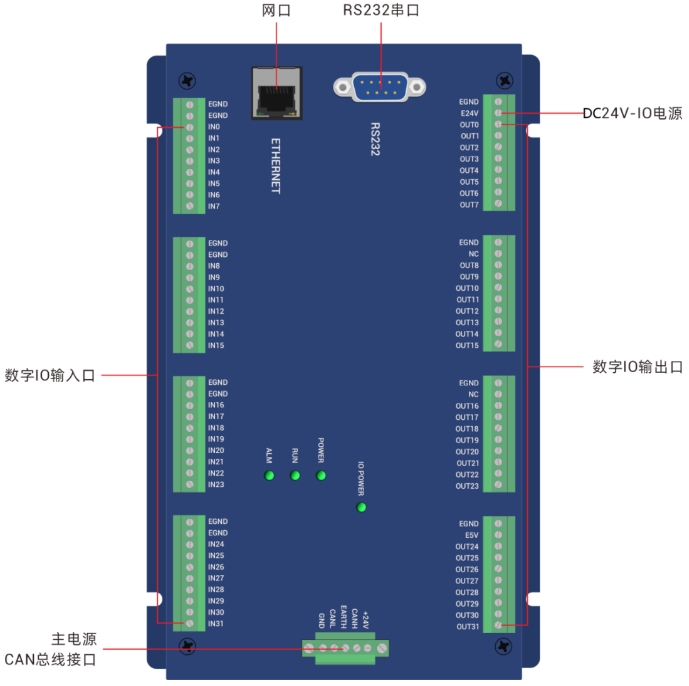
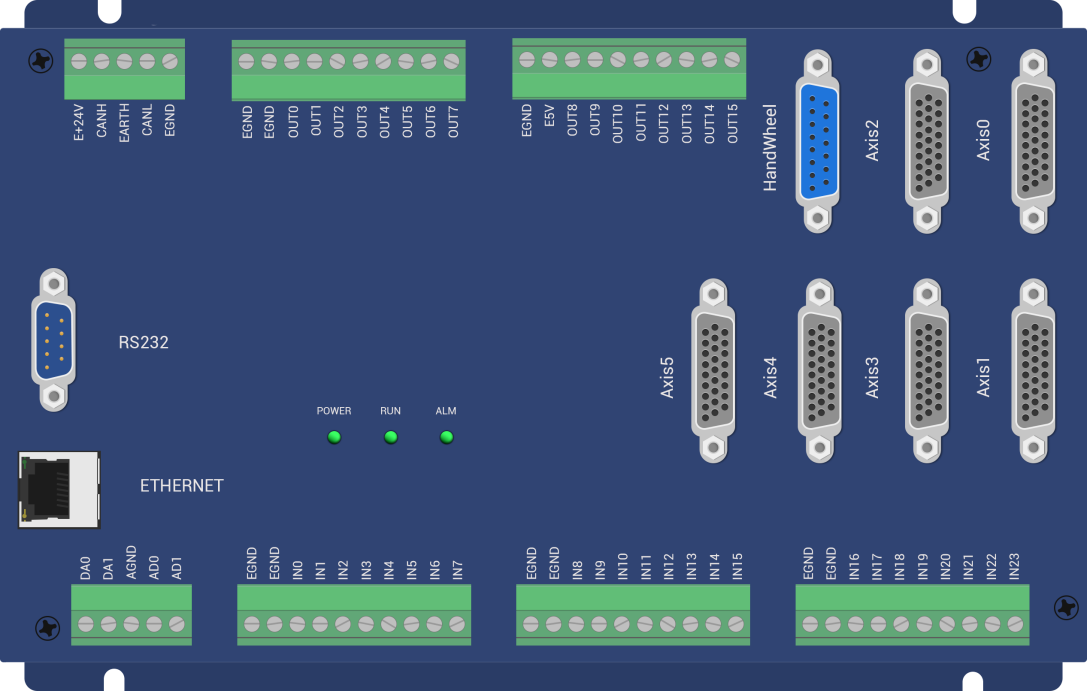
ECI0064 IO控制卡
ECI0032/ECI0064等ECI 0系列运动控制卡采用了优化的网络通讯协议可以实现实时的逻辑控制和IO状态的监控。
ECI0032/ECI0064等ECI 0系列IO卡的应用程序可以使用VC、VB、VS、C++、C#等软件开发,程序运行时需要动态库zmotion.dll,调试时可以将RTSys软件同时连接控制器,从而方便调试、方便观察。

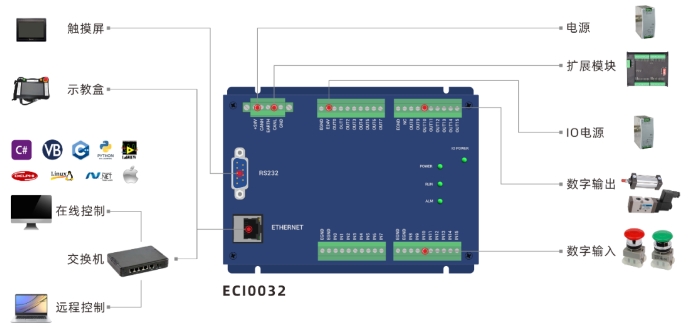
ECI0032典型连接配置图:
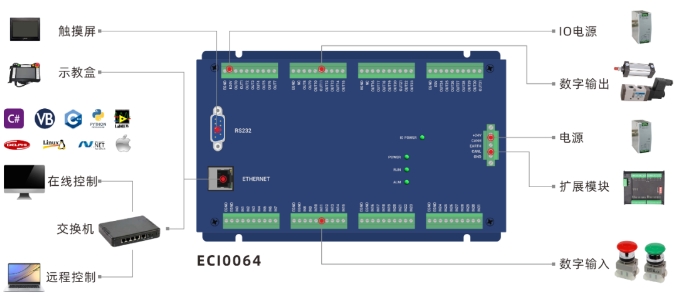
ECI0064典型连接配置图:
二、IO接口介绍
1. IO电源注意事项
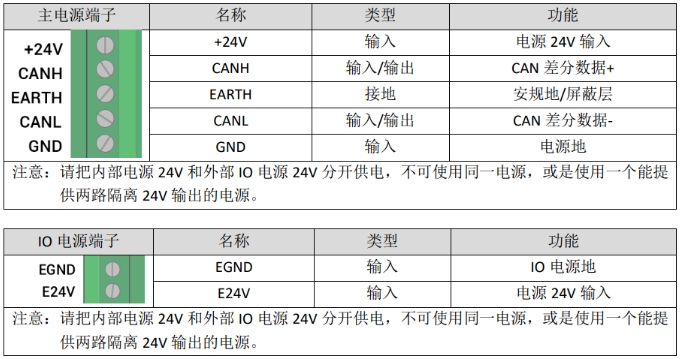
ECI0032/ECI0064和其他控制卡不一样,它正常工作需要两个电源同时供电(内部电源、IO电源)。
值得注意的是:给内部电源和IO电源供电的电源推荐使用2个独立的24V电源,防止IO电路上的干扰直接通过电源传输到控制卡的内部电路上影响控制卡的正常工作。
2.输入口功能介绍
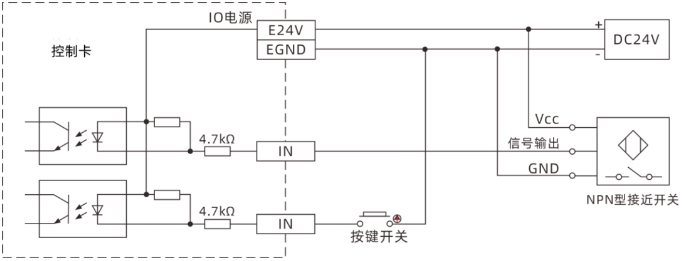
通用输入口接线图参考
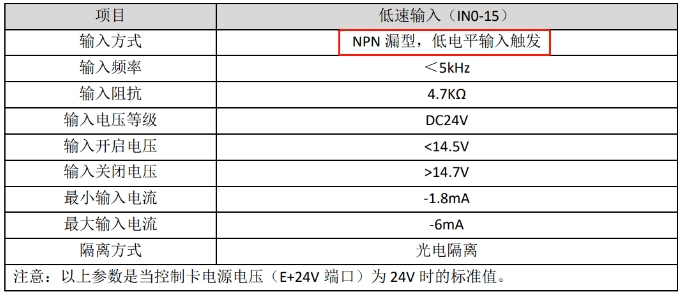
通用输入口的硬件规格
通过硬件参数我们发现通用输入口的输入方式是NPN漏型信号,所以在IO传感器的选择上大家要注意选择NPN类型的传感器。ZMC系列及ECI其他系列等产品的输入也类似,详见对应产品的硬件手册。
如何验证控制卡输入口硬件功能是否正常 ?
根据上图的输入口等效电路图分析: 当输入口和EGND导通的时候输入口就可以捕获到信号。那么我们可以准备一根导线,导线的一段接IO电源的地(EGND),导线的另外一端去不停的触碰对应输入口的端子。同时打开RTSys/ZDevelop软件连接控制卡后打开输入口监控界面去观察对应的输入口状态是否会根据触碰的情况而变化,如果对应输入口和EGND导通对应输入口状态就显示绿灯,输入口和EGND不导通对应的输入口状态就显示红灯,那么输入口的硬件就是正常的。
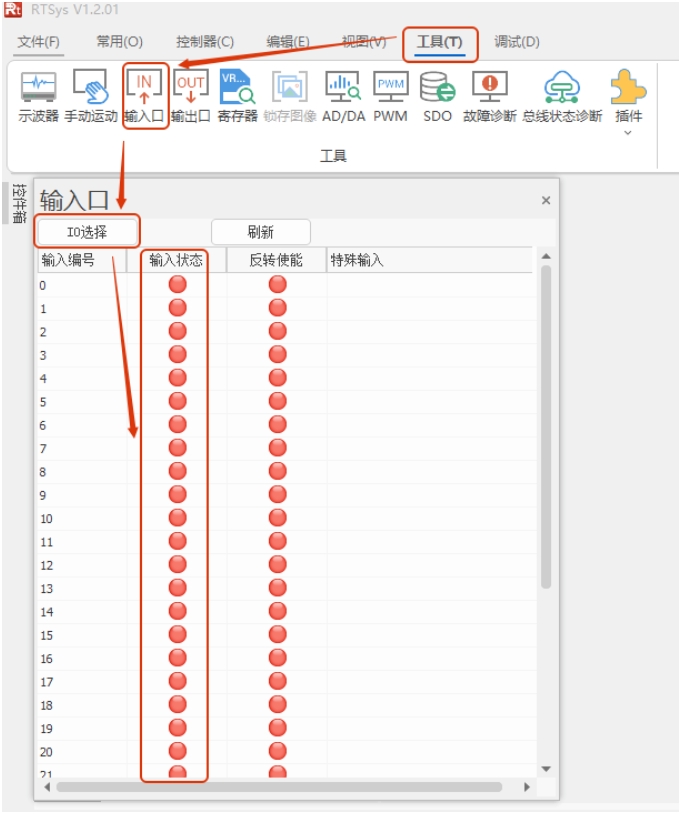
RTSys输入口监控界面
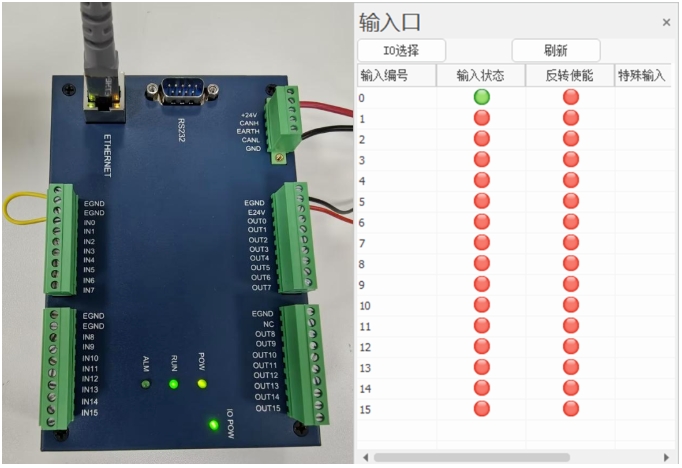
输入口0(IN0)与EGND导通的输入口视图
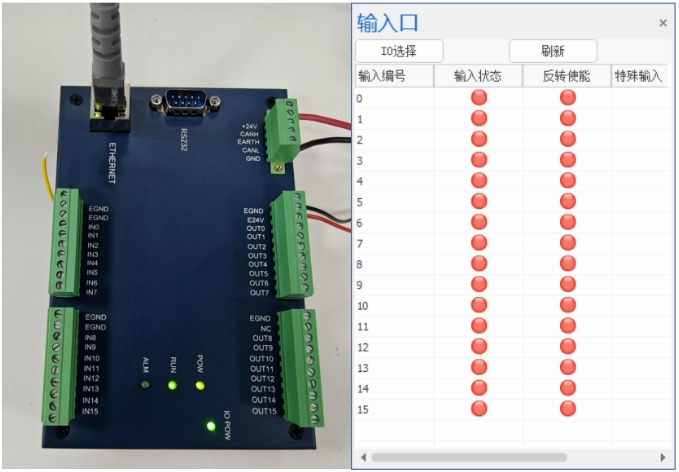
输入口0(IN0)与EGND不导通的输入口视图
3.输出口功能介绍
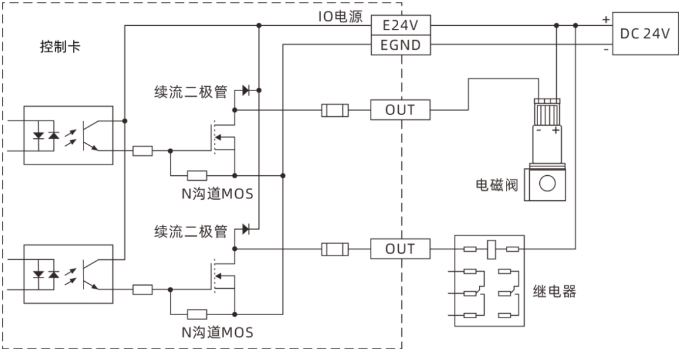
通用输出口接线图参考
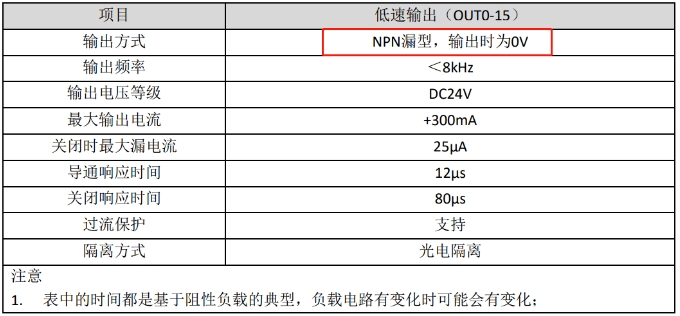
通用输出口的硬件规格
通过硬件参数我们发现通用输出口的输出方式是NPN漏型信号,所以输出口输出的时候是一个0V的信号,也就是和EGND导通的信号。ZMC系列及ECI其他系列等产品的输出也类似,详见对应产品的硬件手册。
如何验证控制卡输出口硬件功能是否正常 ?
根据上图的输出口等效电路图分析: 当输出口输出时,OUT口是和EGND导通的。虽然输出的时候输出口的电压也是0V但输出口没有输出的时候,输出口的状态是一个高阻态的状态。所以验证输出口的功能是不推荐使用万用表的电压档去测试,而是通过万用表的导通档去打导通测试输出口的功能是否正常。 (万用表打到导通档,如果是红黑表笔之间是导通的,那么万用表会发出滴滴的声音。不同的万用表的叫声不同,大家可以把万用表打到导通档后短接红黑表笔听听声音就知道你的万用表是什么音色了)

万用表导通档档位图
这样的话我们可以打开RTSys/ZDevelop软件连接控制器后打开输出口监控界面,在输出口监控界面去操作对应的输出口开关,同时把万用表打到导通档,然后万用表的红表笔触碰对应输出口的接线端子,黑表笔触碰IO电源的地EGND。
观察当RTSys软件打开输出口的时候万用表是否是导通的(万用表是否有滴滴声),关闭输出口的时候万用表是否是未导通状态(万用表是否有滴滴声),如果是那么输出口的硬件是正常的。
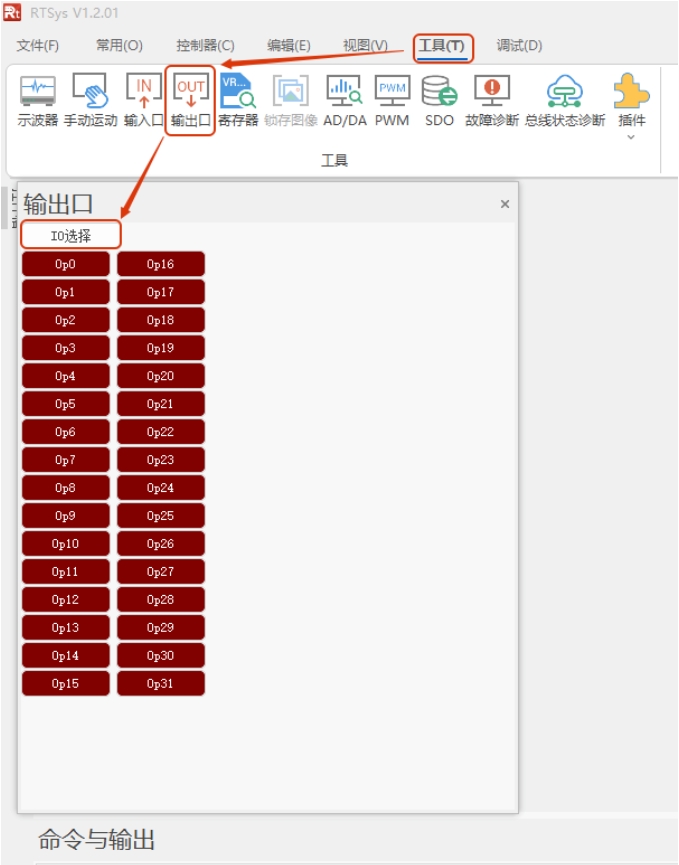
RTSys输出口监控界面
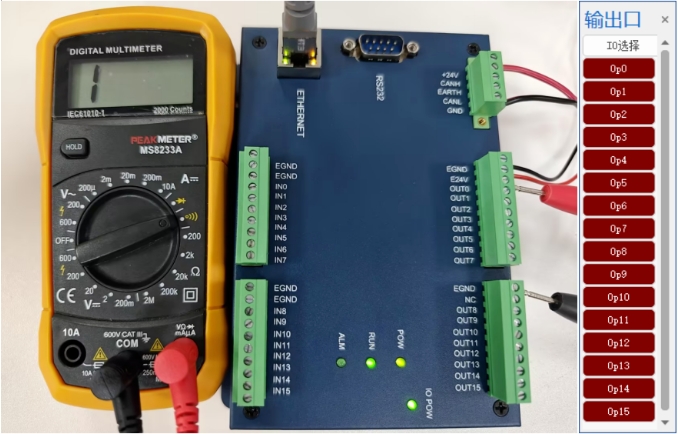
输出口0(OP0)未输出的万用表导通档测试情况
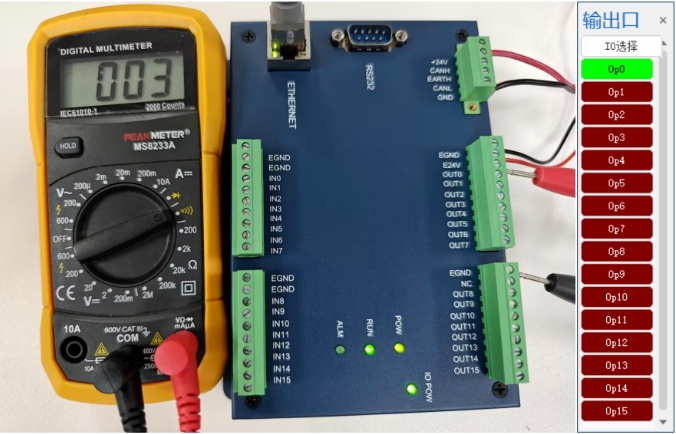
输出口0(OP0)输出时的万用表导通档测试情况
演示视频可点击→以太网IO控制卡:C#实时读写时间测试查看。
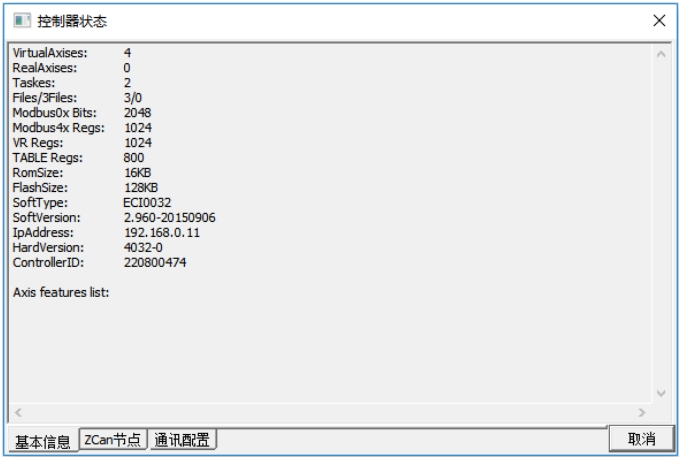
4.控制器基本信息
三、C#语言进行ECIO板卡的开发
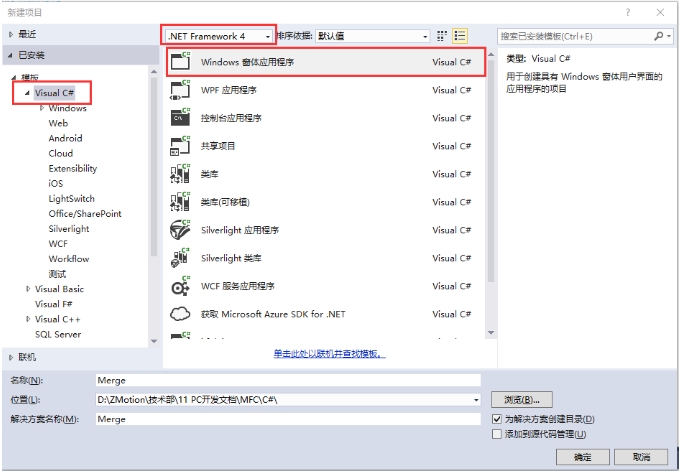
1.在VS2015菜单“文件”→“新建”→ “项目”,启动创建项目向导。

2.选择开发语言为“Visual C#”和.NET Framework 4以及Windows窗体应用程序。
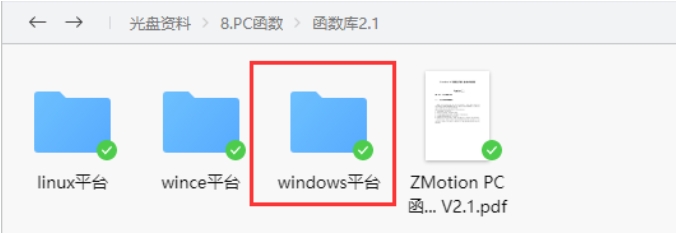
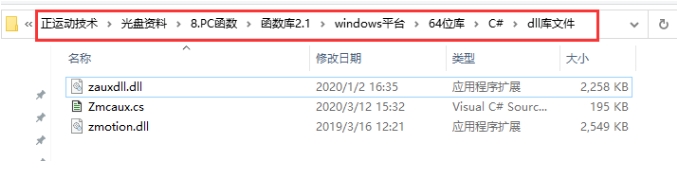
3.找到厂家提供的光盘资料里面的C#函数库,路径如下(64位库为例)。
A、进入厂商提供的光盘资料找到“8.PC函数”文件夹,并点击进入。

B、选择“函数库2.1”文件夹。

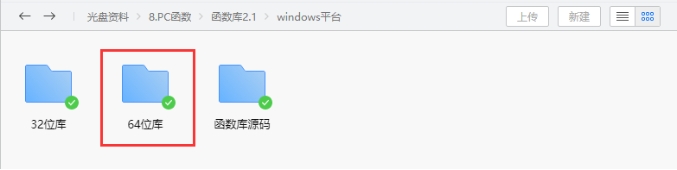
C、选择“Windows平台”文件夹。
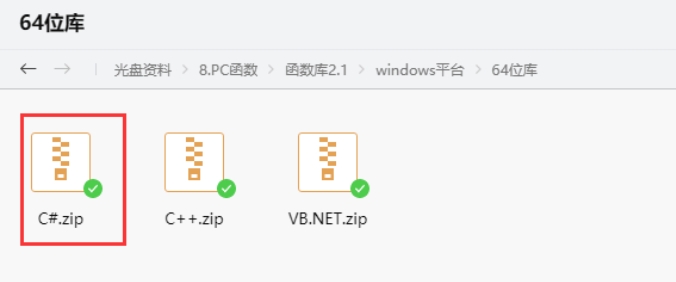
D、根据需要选择对应的函数库这里选择64位库。
E、解压C#的压缩包,里面有C#对应的函数库。
F、函数库具体路径如下。
4.将厂商提供的C#的库文件以及相关文件复制到新建的项目中。
A、将zmcaux.cs文件复制到新建的项目里面中。
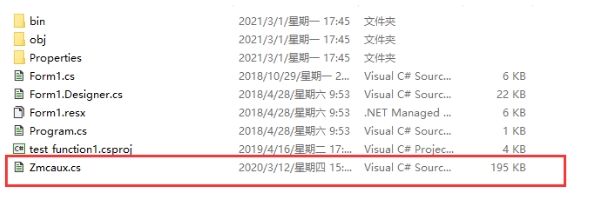
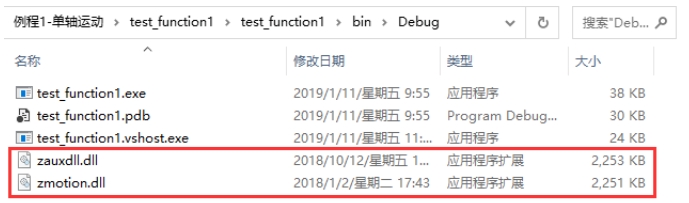
B、将zaux.dll和zmotion.dll文件放入bindebug文件夹中。
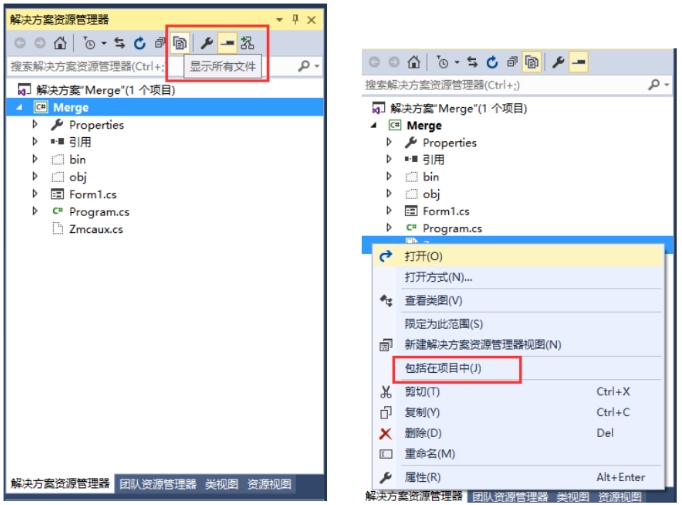
5.用vs打开新建的项目文件,在右边的解决方案资源管理器中点击显示所有,然后鼠标右键点击zmcaux.cs文件,点击包括在项目中。
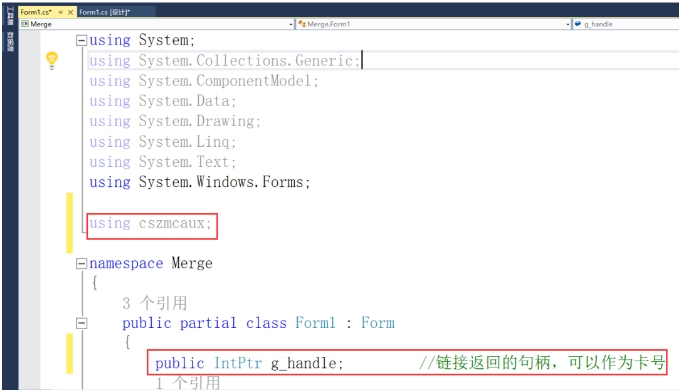
6.双击Form1.cs里面的Form1,出现代码编辑界面,在文件开头写入 using cszmcaux,并声明控制器句柄g_handle。
7.至此项目新建完成,可进行C#项目开发。
四、PC函数介绍
1.PC函数手册也在光盘资料里面,具体路径如下。

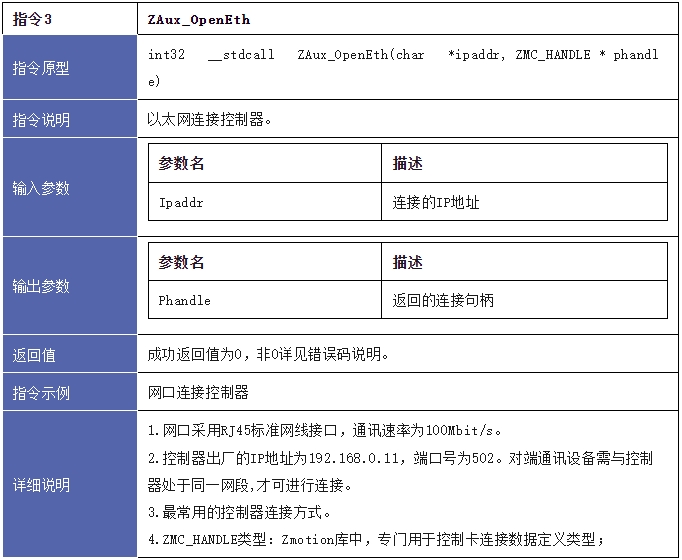
2.链接控制器,获取链接句柄。
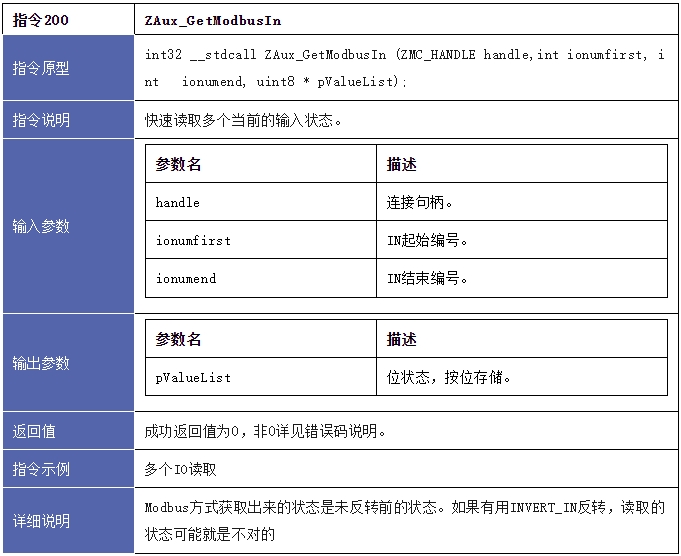
3.快速读取多个输入口当前状态接口说明。
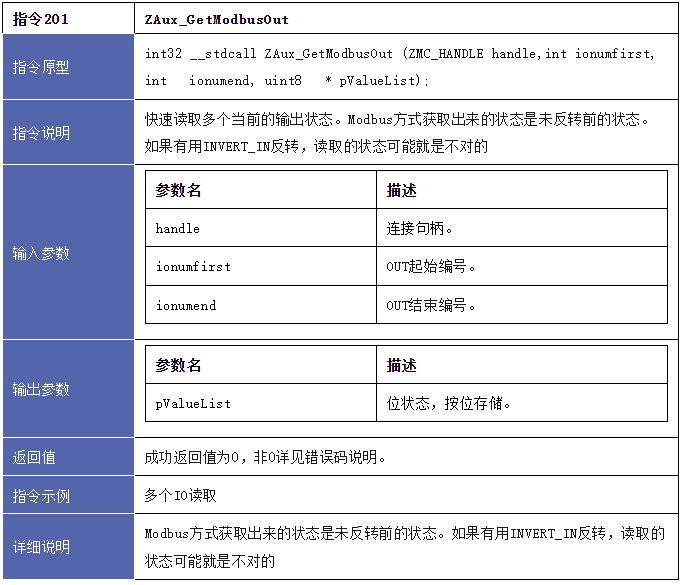
4.快速读取多个输出口当前状态接口说明。
五、C#快速读取多个IO状态的测试例程
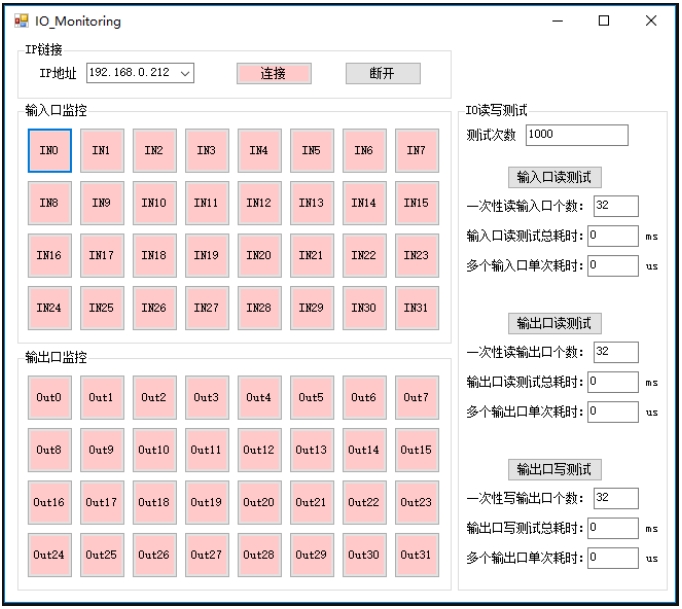
1. 例程界面如下
2.链接按钮的事件处理函数中调用链接控制器的接口函数ZAux_OpenEth(),与控制器进行链接,链接成功后启动定时器1监控控制器的IO状态。
//链接控制器
privatevoidLinkButton_Click(objectsender,EventArgse)
{
zmcaux.ZAux_OpenEth(IP_comboBox.Text,outg_handle);
if(g_handle!=(IntPtr)0)
{
//MessageBox.Show("控制器链接成功!","提示");
timer1.Enabled=true;
LinkButton.BackColor=Color.FromArgb(200,255,200);
}
else
{
MessageBox.Show("控制器链接失败,请检测IP地址!","警告");
LinkButton.BackColor=Color.FromArgb(255,200,200);
}
}
3.通过定时器1监控控制器的IO状态。
//定时器更新IO信息 privatevoidtimer1_Tick(objectsender,EventArgse) { intj,k; intTestNum=50; //快速读取输入口状态接口时间测试 byte[]InState=newbyte[4]; DateTimebeforeDT=System.DateTime.Now; for(intcount=0;count< TestNum; count++) { zmcaux.ZAux_GetModbusIn(g_handle, 0, 32, InState); for (int i = 0; i < 32; i++) { j = i / 8; k = i % 8; if (((InState[j] >>k)&1)==1) { InStatus[i].BackColor=Color.FromArgb(200,255,200); } else { InStatus[i].BackColor=Color.FromArgb(255,200,200); } } } DateTimeafterDT=System.DateTime.Now; //计算beforeDT与afterDT的时间差 TimeSpants=afterDT-beforeDT; InMoitoring.Text="输入口监控_刷新时间:"+(ts.TotalMilliseconds*1000/TestNum).ToString()+"us"; //快速读取输出口状态接口时间测试 byte[]OutState=newbyte[4]; DateTimebeforeDTOP=System.DateTime.Now; for(intcount=0;count< TestNum; count++) { zmcaux.ZAux_GetModbusOut(g_handle, 0, 32, OutState); for (int i = 0; i < 32; i++) { j = i / 8; k = i % 8; if (((OutState[j] >>k)&1)==1) { OutStatus[i].BackColor=Color.FromArgb(200,255,200); } else { OutStatus[i].BackColor=Color.FromArgb(255,200,200); } } } DateTimeafterDTOP=System.DateTime.Now; //计算beforeDTOP与afterDTOP的时间差 ts=afterDTOP-beforeDTOP; OutMoitoring.Text="输出口监控_刷新时间:"+(ts.TotalMilliseconds*1000/TestNum).ToString()+"us"; }
4.多个输入口状态读取速度测试函数如下。
//多个输入口状态读取交互速度测试 privatevoidReadInTest_Click(objectsender,EventArgse) { intj,k; inttestNum=Convert.ToInt32(TestNum.Text.ToString()); intreadInNum=Convert.ToInt32(ReadInNum.Text.ToString()); //快速读取输入口状态接口时间测试 byte[]InState=newbyte[4]; DateTimebeforeDT=System.DateTime.Now; for(intcount=0;count< testNum; count++) { zmcaux.ZAux_GetModbusIn(g_handle, 0, readInNum, InState); if (count % 100 == 0) { for (int i = 0; i < 32; i++) { j = i / 8; k = i % 8; if (((InState[j] >>k)&1)==1) { InStatus[i].BackColor=Color.FromArgb(200,255,200); } else { InStatus[i].BackColor=Color.FromArgb(255,200,200); } } } } DateTimeafterDT=System.DateTime.Now; //计算beforeDT与afterDT的时间差 TimeSpants=afterDT-beforeDT; //总耗时ms ReadInTotTime.Text=ts.TotalMilliseconds.ToString("0.00"); //平均耗时us ReadInTime.Text=(ts.TotalMilliseconds*1000/testNum).ToString("0.00"); }
5.多个输出口状态读取速度测试函数如下。
//多个输出口状态读取交互速度测试
privatevoidReadOutTest_Click(objectsender,EventArgse)
{
intj,k;
inttestNum=Convert.ToInt32(TestNum.Text.ToString());
intreadOutNum=Convert.ToInt32(ReadOutNum.Text.ToString());
//快速读取输入口状态接口时间测试
byte[]OutState=newbyte[4];
DateTimebeforeDT=System.DateTime.Now;
for(intcount=0;count< testNum; count++)
{
zmcaux.ZAux_GetModbusOut(g_handle, 0, readOutNum, OutState);
if (count % 100 == 0)
{
for (int i = 0; i < 32; i++)
{
j = i / 8;
k = i % 8;
if (((OutState[j] >>k)&1)==1)
{
OutStatus[i].BackColor=Color.FromArgb(200,255,200);
}
else
{
OutStatus[i].BackColor=Color.FromArgb(255,200,200);
}
}
}
}
DateTimeafterDT=System.DateTime.Now;
//计算beforeDT与afterDT的时间差
TimeSpants=afterDT-beforeDT;
//总耗时ms
ReadOutTolTime.Text=ts.TotalMilliseconds.ToString("0.00");
//平均耗时us
ReadOutTime.Text=(ts.TotalMilliseconds*1000/testNum).ToString("0.00");}
6.多个输出口状态设置速度测试函数如下。
//多个输出口状态设置交互速度测试
privatevoidWriteOutTest_Click(objectsender,EventArgse)
{
inttestNum=Convert.ToInt32(TestNum.Text.ToString());
intwriteOutNum=Convert.ToInt32(WriteOutNum.Text.ToString());
//快速读取输入口状态接口时间测试
byte[]OutState=newbyte[4];
DateTimebeforeDT=System.DateTime.Now;
for(intcount=0;count< testNum; count++)
{
zmcaux.ZAux_GetModbusOut(g_handle, 0, writeOutNum, OutState);
}
DateTime afterDT = System.DateTime.Now;
//计算beforeDT与afterDT的时间差
TimeSpan ts = afterDT - beforeDT;
//总耗时 ms
WriteOutTolTime.Text = ts.TotalMilliseconds.ToString("0.00");
//平均耗时 us
WriteOutTime.Text = (ts.TotalMilliseconds * 1000 / testNum).ToString("0.00");
}
7.多个IO状态与上位机交互速度测试结果如下。
(1)32个输入输出口读写1000次,交互速度测试结果:

(2)32个输入输出口读写1W次,交互速度测试结果:

(3)32个输入输出口读写10W次,交互速度测试结果:

六、分析与结论
以上分别是对32个输入口的读速度,32个输出口的读速度,32个输出口的写速度进行测试,从上面的运行效果图的数据显示来看,
无论是输入口还是输出口它们的交互速度都保持在200us左右,并且效果十分稳定。
当测试次数从1000次增加到1W次,甚至10W次,平均每次的交互速度还是保持在200us左右。

完整代码获取地址
▼
本次,正运动技术以太网IO控制卡:C#实时读写时间测试 ,就分享到这里。
更多精彩内容请关注“ 正运动小助手 ”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师:400-089-8936。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
正运动技术专注于运动控制技术研究和通用运动控制软硬件产品的研发,是国家级高新技术企业。正运动技术汇集了来自华为、中兴等公司的优秀人才,在坚持自主创新的同时,积极联合各大高校协同运动控制基础技术的研究,是国内工控领域发展最快的企业之一,也是国内少有、完整掌握运动控制核心技术和实时工控软件平台技术的企业。主要业务有:运动控制卡_运动控制器_EtherCAT运动控制卡_EtherCAT控制器_运动控制系统_视觉控制器__运动控制PLC_运动控制_机器人控制器_视觉定位_XPCIe/XPCI系列运动控制卡等 。
审核编辑 黄宇
-
测试
+关注
关注
8文章
5373浏览量
126971 -
控制系统
+关注
关注
41文章
6657浏览量
110814 -
以太网
+关注
关注
40文章
5460浏览量
172454 -
运动控制卡
+关注
关注
7文章
114浏览量
15500
发布评论请先 登录
相关推荐

车载以太网与传统以太网的区别

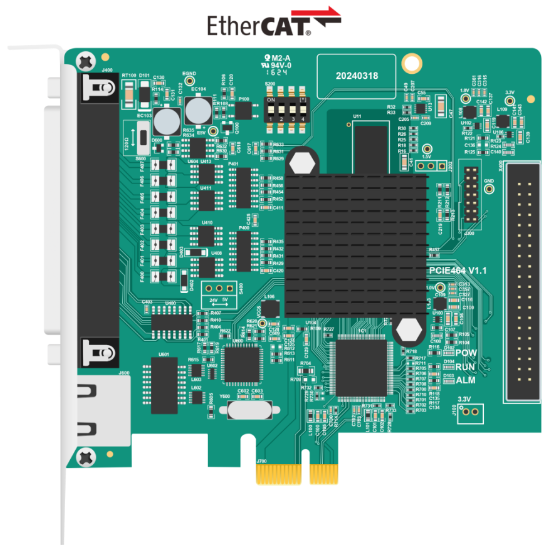
PCIe EtherCAT实时运动控制卡PCIE464的IO与编码器读写应用





 工商网监
工商网监
评论