 无刷电机方波驱动原理分析
无刷电机方波驱动原理分析
通过前几期芝识课堂的学习,相信大家已经熟练掌握了电机的各种基本情况和工作模式,大家也该跃跃欲试希望能进入实战动手环节了,准备好操作电机的所有前期准备,让我们一起让无刷电机真正工作起来吧!
我们知道无传感器转子检测的无刷电机结构最为简单,而方波驱动可以通过感应电压检测转子位置,那我们第一次尝试就先从最简单的入手,用方波驱动方式来让无刷电机转起来吧!
方波驱动配置
驱动电机之前我们要先对方波驱动进行配置。在无传感器方波驱动的情况下,整个驱动过程涉及的单元包括需要用于驱动微控制器和电机的逆变电路、驱动逆变电路的预驱电路和比较输出电压的比较器。图1是一个典型的方波驱动基本流程示意图。图中最上方为驱动器指令,该指令是由MCU根据转子位置信号来生成的,信号输出后将进行PWM调制成为新的驱动指令,再经由逆变器单元作用于电机驱动电压,从而开启工作流程。在比较器中,对感应电压变化进行检测以识别转子位置,再反馈到MCU中输出下一个驱动指令,进而完成一个基本的工作流程循环。
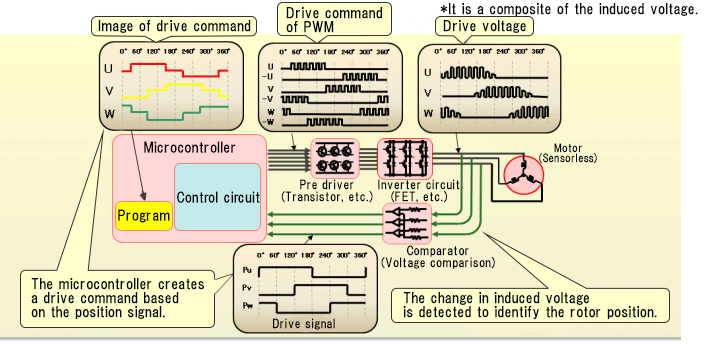
图1 方波驱动的细节示意
注意事项
需要注意的是,在无传感器方波驱动的情况下,启动时不会产生感应电动势,无法识别转子位置。因此,需要执行以下操作,流程细节如图2。
(1)首先,强行使电流流向指定线圈,使转子移动到指定位置
(2)使电流在低电压和恒定周期的线圈中流动
(3)在逐渐增加电压的同时旋转转子
(4)增加转数,转子位置可以通过感应电压检测
(5)使电流流向检测到的转子位置所对应的线圈
(6)如果能检测到稳定的位置,则开始稳定运行以达到目标速度
在稳定运行状态,通过反馈目标速度偏差,可以保持速度不受负载波动的影响。
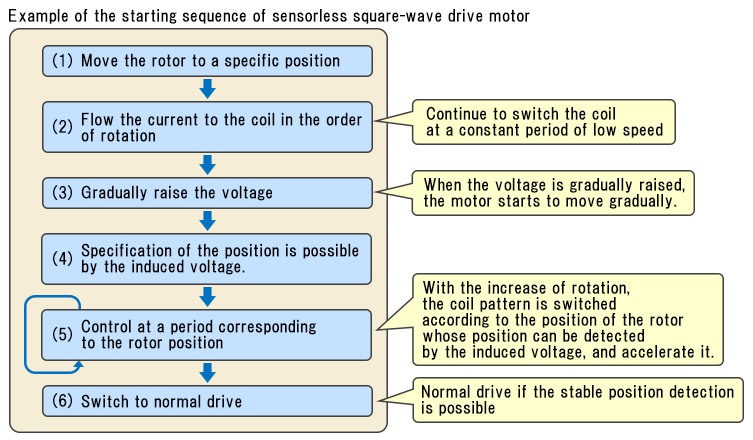
图2 无传感器方波驱动电机开启流程示意
注:当强行移动到指定位置时,可能会因停止位置而瞬间反转
方波驱动原理
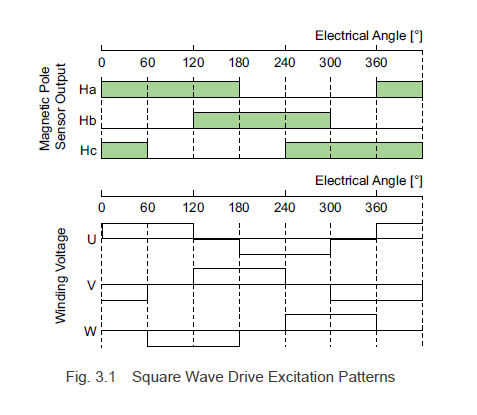
在方波驱动电机启动后,电机的转子开始旋转,通过与旋转同步地改变流过线圈的电流方向,可以使转子连续旋转。其中,在位置检测信号和PWM驱动指令之间存在了30度相位差。方波驱动电机的电流流动有6种模式:U相->V相、U相->W相、V相->W相、V相->U相、W相->U相、W相->V相。这就意味着,每60度切换一次电流方向,如果要使电机反向旋转,需要将流向线圈的6种电流模式的顺序颠倒,详细方波驱动旋转的工作流程如图3所示。
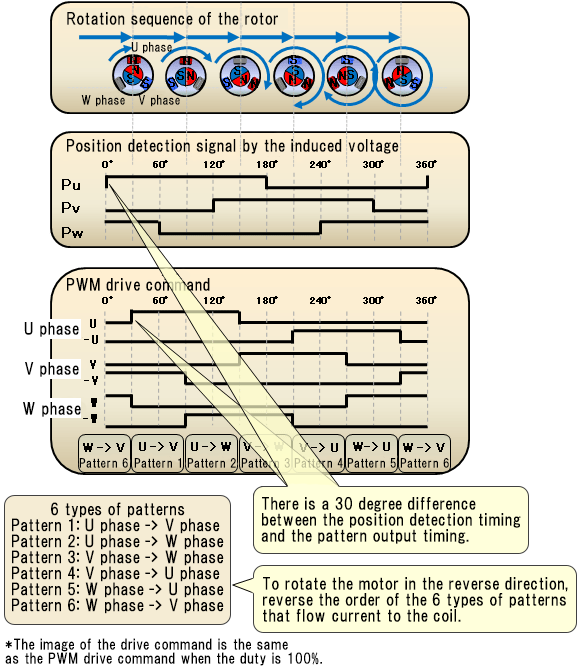
图3 方波驱动旋转流程示意
在掌握了最基础的方波驱动无刷电机基本技巧之后,需要进一步对更复杂的正弦波驱动来操控无刷电机。不用着急!下一期的芝识课堂将跟大家一起实现电机驱动进阶操作——正弦波驱动无刷电机实战。
东芝电子元件及存储装置株式会社是先进的半导体和存储解决方案的领先供应商,公司累积了半个多世纪的经验和创新,为客户和合作伙伴提供分立半导体、系统LSI和HDD领域的杰出解决方案。
东芝电子元件及存储装置株式会社十分注重与客户的密切协作,旨在促进价值共创,共同开拓新市场,期待为世界各地的人们建设更美好的未来并做出贡献。
-
微控制器
+关注
关注
48文章
7482浏览量
151009 -
传感器
+关注
关注
2548文章
50642浏览量
751670 -
mcu
+关注
关注
146文章
16977浏览量
350208 -
方波
+关注
关注
4文章
81浏览量
32845 -
无刷电机
+关注
关注
57文章
823浏览量
45752
原文标题:芝识课堂—让无刷电机转起来(上)
文章出处:【微信号:toshiba_semicon,微信公众号:东芝半导体】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
无刷电机开发FOC方波
直流无刷电机方波控制
无刷电机的应用、命名规则及原理
无刷电机驱动系统详解
无刷电机无感六步方波驱动原理及过零现象产生分析

无刷电机与驱动
其利天下技术·低速无刷电机如何更好的控制?无刷电机驱动方案开发





 工商网监
工商网监
评论