 Xsens Sirius-在严苛环境中进行3D惯性导航
Xsens Sirius-在严苛环境中进行3D惯性导航
在水下应用中,包括ROV、AUV、信标和应答器,Xsens IMUs带来精确的导航、定向和控制。对于具有挑战性的水下环境,我们的IMU解决方案至关重要,它提高了水下运载工具和设备的整体性能。无论是探索海洋深度还是部署海底基础设施,依靠Xsens在水下世界的深处获得最佳可靠性和导航精度。
自主式水下机器人(AUV)在油气钻探和开采、海洋勘测和水生环境监测等领域发挥着至关重要的作用。AUV可以执行潜水员难以完成的功能,并且可以下潜到危及人类操作员的深度。
今天市场上的大多数AUV产品都很大,能够携带沉重的有效载荷,并配备了大型电池,使它们能够长时间呆在水下。这种类型的产品适合石油公司等客户,他们不仅能负担得起购买大型自主式潜水器的巨额费用,还能负担得起将它运输到需要的地方、操纵它就位并操作它的费用。
总部位于英国的海产品供应商行星海洋发现这为一个更小、更便宜的自主式潜水器留下了市场空白。这种认识刺激了生态潜艇一系列小型、低成本的自主式潜水器,可以由一个人轻松携带、发射、操作和从水中回收。
它的目标是使自主式潜水器的使用民主化:让所有研究机构、大学、商业用户、欠发达国家的用户和其他资源有限的用户都能接触到它们。
事实证明,这种创新的自主式潜水器的设计需要一个既紧凑又精确的运动跟踪传感器。

Xsens使精确的水下导航成为可能
ecoSUB AUV的有效运行需要通过航位推算技术获得精确的位置数据。在水面上,地理定位很容易:卫星定位信号确定位置的典型精度为5米。
然而,卫星的射频信号不能穿透水,因此ecoSUB AUV通过持续跟踪其相对于水面发射点的运动来确定其位置。
对于这种运动跟踪功能,ecoSUB使用Xsens MTi-3 AHRS(姿态和航向参考系统),以及用于深度测量的离散压力传感器。MTi-3传感器为ecoSUB提供高精度的横滚、俯仰、航向和加速度测量。ecoSUB的机载计算机不断将这些测量值转换成位置坐标。
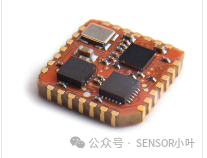
Xsens MTi-3运动跟踪器:小巧、轻便、可靠适用于ecoSUB设计的限制意味着运动传感器必须提供三个基本特性:传感器运动跟踪数据的高精度可靠性高,抗磁干扰能力强体积小,重量轻Xsens MTi-3 AHRS具备所有这三个特点。MTi-3集成了多种传感器功能,包括三维加速度计、陀螺仪和磁力计以及处理器。传感器对滚动和俯仰的静态测量精度为±0.5,对偏航的测量精度为±2。在使用中,当仅使用MTi-3运动传感器和压力传感器测量时,ecoSUB典型地实现了行进距离的5%的定位精度。无论周围磁场如何变化,传感器的测量精度都保持稳定。ecoSUB的设计者充分利用了MTi-3传感器内置的复杂过滤功能:该传感器可以配置为在各种类型的工作环境中工作,包括连续的强磁干扰。这对于ecoSUB来说是理想的,在eco sub中,螺旋桨通过磁力与马达相连。所有功能都集成在一个紧凑的封装中,尺寸仅为12.1 x 12.1 x 2.55mm毫米,重量不到1克。典型功耗不到100mW,有助于ecoSUB的电池持续更长时间,并延长车辆的行驶里程。
Xsens Sirius-在严苛环境中进行3D惯性导航
Xsens Sirius具有IMU、VRU和AHRS功能,可在严苛的条件下提供可靠的3D实时精确数据。该系列与众不同的一个主要特点是其先进的信号管道,具有模拟滤波功能,即使在剧烈的振动环境中也能确保高抗振性,实现精确测量。Movella希望通过这一系列新产品,进一步支持自动驾驶汽车创新者在陆地、空中或水下的各种应用。
海洋
Marine
部署在水面船只和水下机器人上,例如遥控潜水器(ROV)和自主水下机器人(AUV)上,用于精确导航或稳定性,为其提供可靠的航向和翻滚/俯仰数据,或支持测深绘图。
陆基移动机器人
Land based Mobile Robotics
为各种机器人应用提供精确导航,包括在动态环境中运行的室内移动机器人(AMR/AGV)和在崎岖地形中导航的室外移动机器人。
精准农业
Precision Agriculture
提供精确的3D定位数据,用于导航和控制自主农业机械和小型移动机器人。
三维数字测绘和勘测
3D Digital Mapping and Surveying
支持高保真数据采集和地理参照,用于航空、陆地和水下测深绘图,利用声纳、激光雷达和摄像系统等创建精确、详细的地图和三维模型。
-
机器人
+关注
关注
212文章
28882浏览量
209511 -
3D
+关注
关注
9文章
2926浏览量
108363 -
惯性导航
+关注
关注
2文章
57浏览量
13583
发布评论请先 登录
相关推荐
TechWiz LCD 3D应用:局部液晶配向
TechWiz LCD 3D应用:局部液晶配向
Xsens新一代Sirius工业惯性传感器:精准应对高要求严苛环境挑战

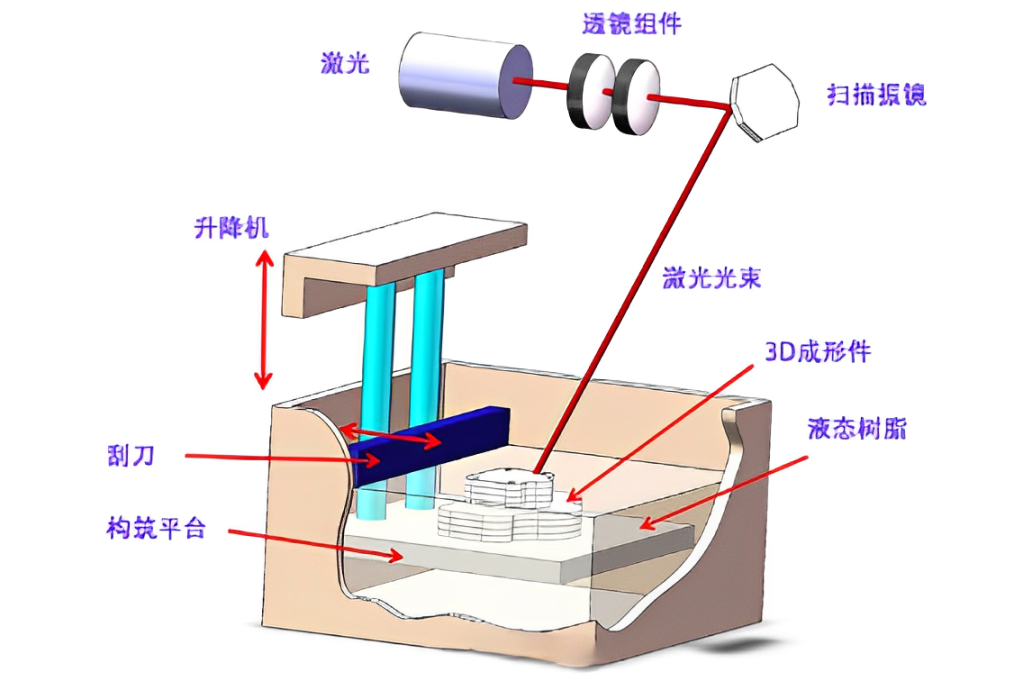
UV光固化技术在3D打印中的应用
使用NVIDIA Edify助力的服务创建3D资产和虚拟环境照明
3D打印汽车零部件建模设计3D打印服务

裸眼3D笔记本电脑——先进的光场裸眼3D技术
3D视觉技术在惯性环上料领域的未来发展
【行业前沿】量子技术+惯性导航,美国海军研究实验室的最新研究成果
四维图新与中科创达携手合作,共同推出全新的3D导航地图解决方案
请问3D NAND如何进行台阶刻蚀呢?
Stability AI推出Stable Video 3D模型,可制作多视角3D视频





 工商网监
工商网监
评论