 关于欧盟法规中测试场景的研究
关于欧盟法规中测试场景的研究
关于欧盟法规中测试场景的研究
1.引言
场景是智能网联汽车测试技术的基础,基于场景的功能测试方法对于弥补基于里程的测试方法的局限性,提高系统开发效率、产品落地效率等方面都有重要作用。在众多的场景来源中,标准法规场景是系统功能在研发和认证阶段需要满足的基本场景,能够对智能网联汽车应有的基本能力进行测试。法规类场景可确保智能网联汽车在不同地区均能符合法规要求,从而确保车辆在道路上的安全性、合规性和可靠性。
在智能网联汽车的立法层面,欧盟等国际组织持续开展法规制定工作,并且已经形成了多个成果,包括EU 2019/2144《新的车辆通用安全法规》、UN R171《驾驶员控制辅助系统(DCAS)型式批准的统一规定》、UN R157《自动车辆保持系统(ALKS)型式批准的统一规定》、EU 2022/1426《全自动驾驶车辆自动驾驶系统(ADS)型式批准的统一程序和技术规范》等,其中均针对测试场景进行了相关描述与规定。
同时,对于海外目标市场的车企来说,遵守目标国家或地区的法规标准,满足当地的产品准入要求是进入该市场的必要条件。因此,企业无论是面向“出海”需求还是单纯面向算法验证的需求,法规类测试场景应被考虑为必须项。由于政策、市场等原因,欧洲成为国内车企出海的主要目标地区。但目前欧盟智能驾驶标准法规中并未给出具体场景参数,赛目科技对此开展相关研究,基于“功能场景→逻辑场景→具体场景”的逻辑思路,并结合“合理可预见”和专家经验的仿真参数设置方法,构建具体测试场景集,为企业开展基于场景的模拟仿真测试提供参考。
2.测试场景要求及泛化方法
2.1标准法规测试场景
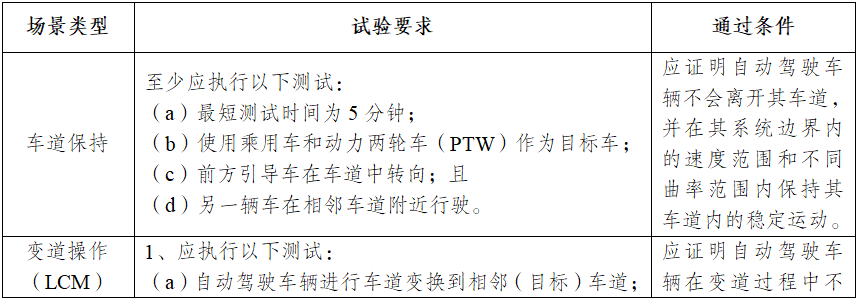
在欧盟汽车标准法规体系中,以汽车安全框架性技术法规EU2019/2144为代表,旨在加强对车内乘员、弱势道路使用者的保护,减少交通事故率和人员伤亡。EU 2019/2144规定了在汽车安全领域应满足各项技术法规,大部分直接采用了联合国制修订的UN R汽车技术法规,逐步建立起从组合驾驶辅助到自动驾驶的全方位监管体系。其中,UN R171针对驾驶员控制辅助系统(DCAS),规定了持续横向和纵向运动控制辅助系统的性能要求[1];UN R157针对自动车道保持系统(ALKS),将特定交通环境中的自动驾驶系统车速上限由最开始的60 km/h限制扩展到130 km/h,并允许自动变道[2];针对更高级别的自动驾驶型式批准,欧盟率先独立制定自己的规则EU 2022/1426,规定了适用于全自动车辆自动驾驶系统(ADS)型式批准的统一程序和技术规范[3]。以上法规均描述了各种测试场景要求,为智能网联汽车提供了统一的测试基准。
2.1.1 R171测试场景
UN R171制定了关于驾驶员控制辅助系统(DCAS)型式认证的统一规定,可通过持续的横向和纵向运动控制,协助人类驾驶员执行车辆驾驶任务(不完全接管驾驶),是ADAS的一个子集。在进行提交型式认证文件的测试场景部分,应至少包含附录4中4.2.5部分提出的功能测试和其他交通参与者响应测试两部分内容,目的是验证OEM提交的系统设计文件中描述系统所具备的能力及行为表现与在实际测试中是否一致。其中,DCAS功能测试场景包括车道居中控制、驾驶员主动变道以及系统发起的车道变更测试。在满足DCAS功能测试场景同时还需满足其他交通参与者识别及响应测试场景,如直道或弯道前方静止车辆、直道前方慢行车辆、目标车辆切出后存在静止车辆、相邻车道车辆切入、前方存在静止行人或自行车、行人或自行车横穿道路、车辆右转与横穿行人或自行车冲突、直行车辆与对向左转车辆或右侧直行车辆冲突等测试,试验项目如表1所示。
表1R171测试场景清单
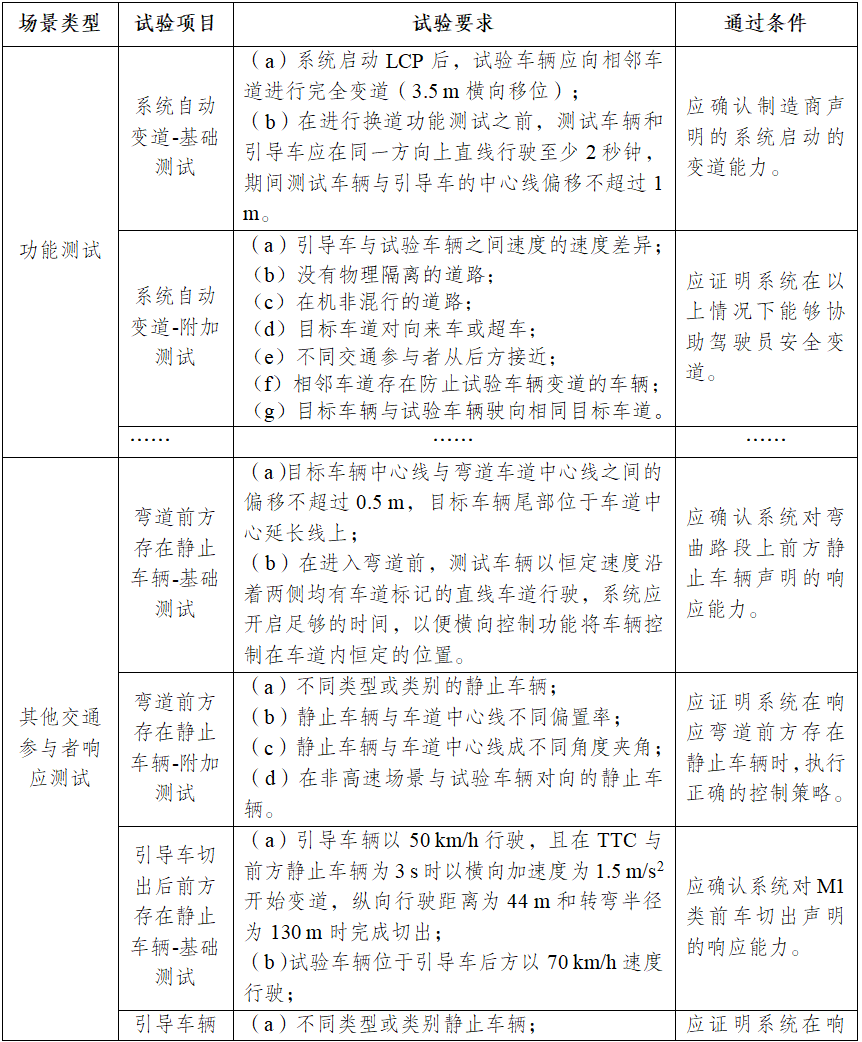
2.1.2 R157测试场景
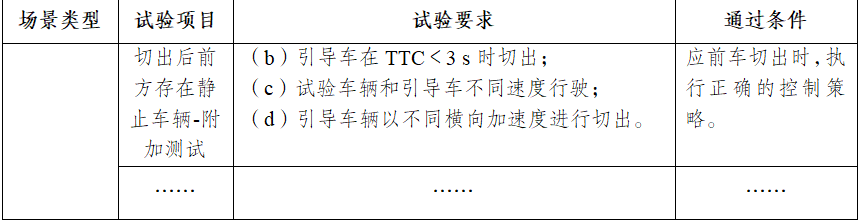
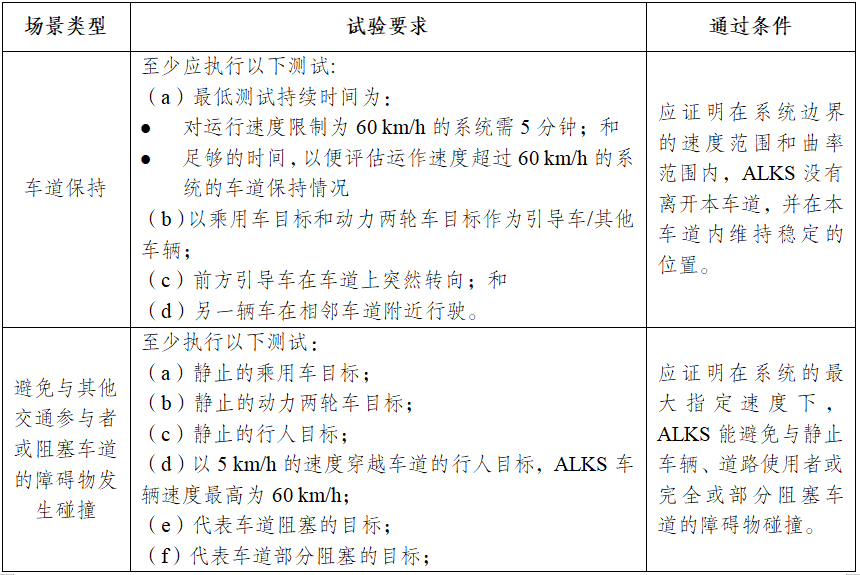
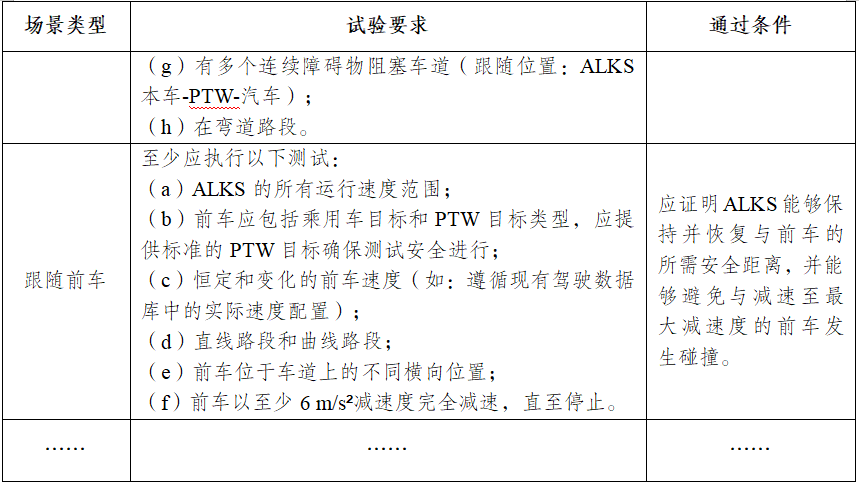
UN R157制定了关于自动车道保持系统(ALKS)车辆认证的统一规定,ALKS控制车辆横向和纵向运动使其保持在车道内行驶,激活后无需驾驶员进一步的命令。该法规修订后基本覆盖了高速公路自动驾驶全场景,不再仅适用于高速公路低速或堵车场景。法规中附件5规定了场地测试的最小场景集合,目的是验证本法规第5~7段中对ALKS的技术要求,以评估系统关于动态驾驶任务的性能。测试场景包括车道保持、避免与其他交通参与者或阻塞车道的障碍物相撞、跟随前车、前车切入、前车变道后出现静态障碍物、变道等,试验项目如表2所示。
表2R157测试场景清单
2.1.3 EU 2022/1426测试场景
EU 2022/1426制定了关于全自动驾驶车辆(fully automated vehicles)型式认证的统一流程和技术标准,是世界上首个允许成员国批准注册和销售高级别自动驾驶技术汽车的技术法规。法规中附件3第三部分PART 3规定了实车测试的最小测试集合,其中8.1、8.2、8.5、8.6、8.7、8.8、8.9在封闭场地内进行测试,8.3、8.4、8.10在实际道路上进行测试。目的是验证附件2中所述的最低性能要求、ADS的功能和附件3第二部分中所述的制造商的安全概念,以评估ADS的性能。测试场景包括车道保持、变道操作、避撞测试、跟随前车、高速公路以及不同驾驶模式切换测试场景等,试验项目如表3所示。
表3EU2022/1426测试场景清单
2.2基于法规的场景构建方法
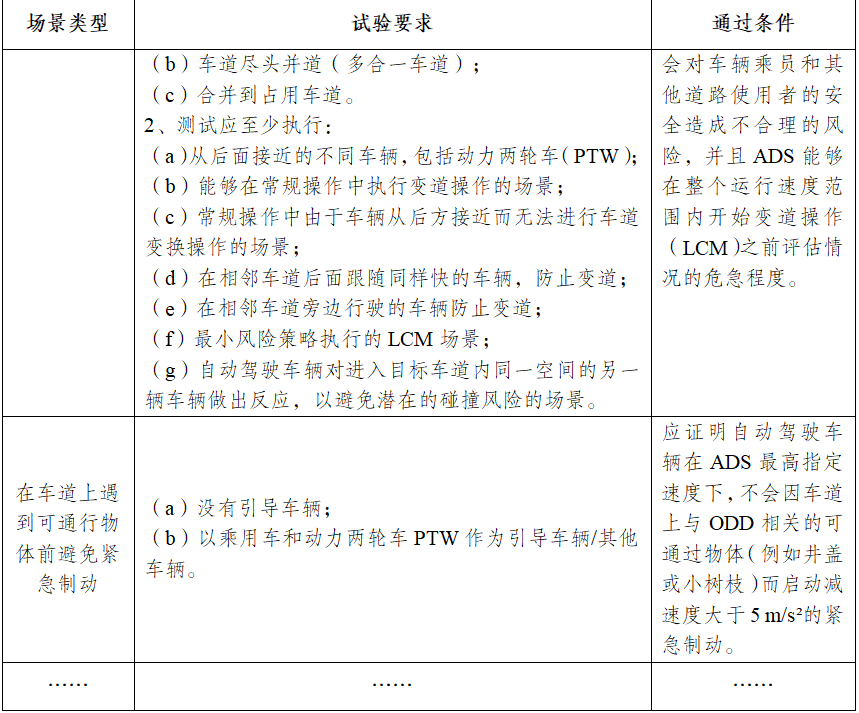
基于“功能场景→逻辑场景→具体场景”的分析方法,结合赛目针对场景参数泛化原则的研究经验,构建具体测试场景集,从而实现各法规中针对不同等级驾驶自动化系统的功能验证。首先,基于试验要求进行功能场景转化,为保证场景的完整性,在试验要求映射场景元素基础上,还需增加一些其他必要元素进行组合,形成一个功能场景,至少包括道路、道路设施、运动对象(自车和其他交通参与者)、天气环境的描述;其次,基于功能场景中确定的元素类别,映射场景参数并设定逻辑场景参数空间;最后,对场景参数分析并选取关键参数进行充分泛化,形成对应的仿真参数组合用于仿真试验。具体测试场景集分析流程如图1所示。
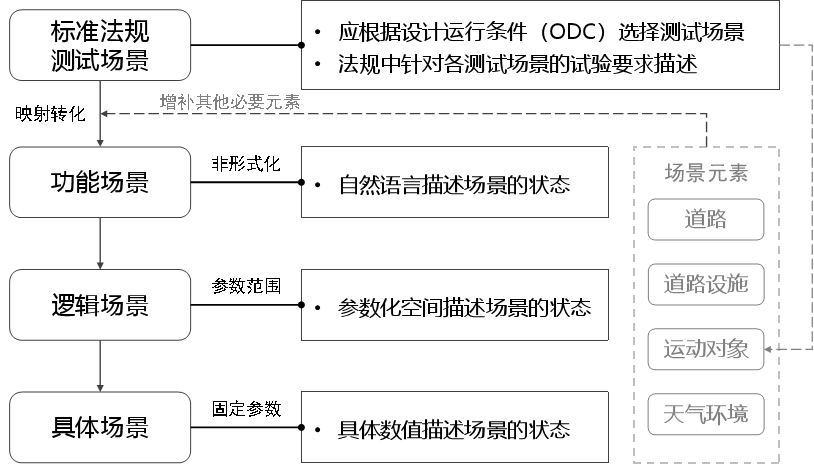
图1 具体测试场景集分析流程
以R157中“车道保持试验”为例,基于上述分析流程构建具体试验场景,车道保持类具体场景生成框架如图2所示。
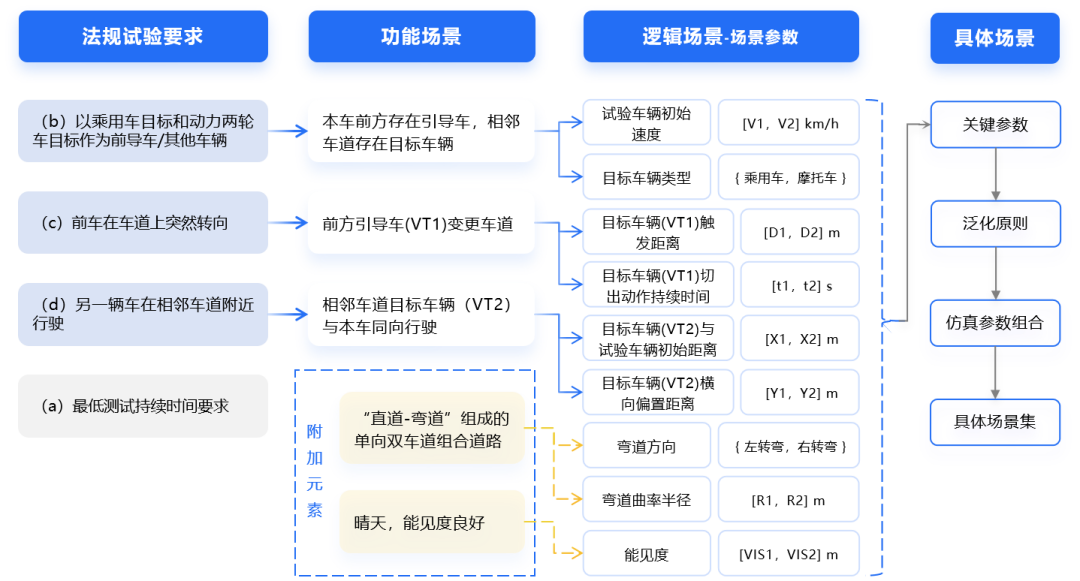
图2 车道保持试验具体场景生成框架
通过试验要求分析,生成相应的符合测试需求的功能场景。除法规中针对自车和其他交通参与者的位置与动作信息外,补充设定直道-弯道的双车道组合道路作为道路拓扑类型,同时明确能见度良好的天气条件,构建功能场景。基于上述功能场景和系统的设计运行条件边界,映射场景参数并得到相应参数空间,场景参数类型包括:试验车辆初始速度、目标车辆(VT1/VT2)类型、目标车辆(VT1)触发距离、目标车辆(VT2)与试验车辆初始距离、目标车辆(VT2)横向偏置距离、弯道曲率半径等。根据试验项目筛选关键参数,确定泛化原则,通过定义测试参数的不同组合(如车辆速度、目标物类型和横向偏置、弯道曲率半径等),从而得到具体试验场景集。
3.仿真测试案例
为验证上述具体场景集分析方法,本文基于Sim Pro仿真测试工具,参考图2的设计思路,选取“弯道车道保持试验项目”开展具体场景搭建及测试,场景描述示例如下。
3.1弯道车道保持试验
3.1.1 试验场景
弯道车道保持试验场景应符合如下要求,示意图如图3所示。
a)试验道路:一条直道、弯道和直道组成的单向双车道组合道路,弯道前直道长度至少150 m,弯道后直道长度至少200 m,车道宽度为3.75 m,道路表面附着系数³0.8。道路最高限速(V0Lim)、弯道方向(Fc)、弯道长度(Lc)按表4取值,弯道曲率半径(Rρ)按表5取值。
a)道路交通标线:同向车道间车道线类型为白色虚线,其余为白色实线。
b)试验环境:试验车辆(VUT)前方存在目标车辆(VT1),相邻车道存在目标车辆(VT2)同向匀速行驶。试验车辆初始位置(D0VUT)、目标车辆触发距离(DX0trigger_VT1)、目标车辆切出动作持续时间(To-VT1)、能见度(VIS)按表4取值,目标车辆类型(Type_VTn)、目标车辆(VT1)初始速度(V0VT1)、目标车辆(VT2)初始速度(V0VT2)、目标车辆与试验车辆初始距离(D0VUT_VT2)、目标车辆横向偏置距离(DYVT2_LC)按表5取值。
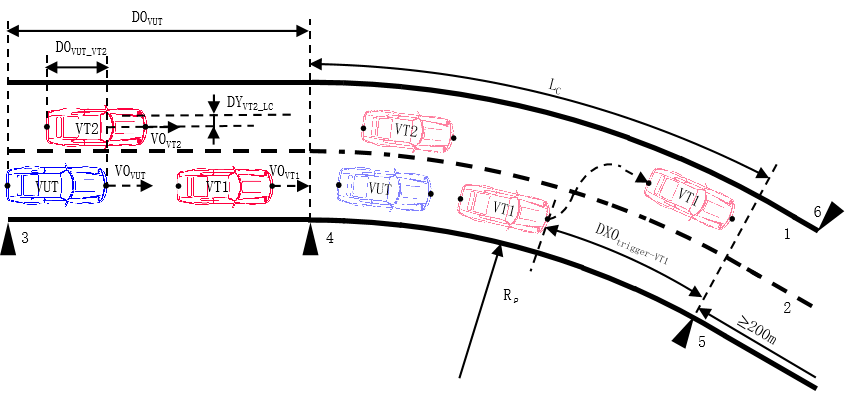
标引序号说明:
1——1号车道;
2——2号车道;
3——具体试验场景起点;
4——弯道起点;
5——弯道终点;
6——具体试验场景终点。
图3 弯道车道保持试验场景示意图
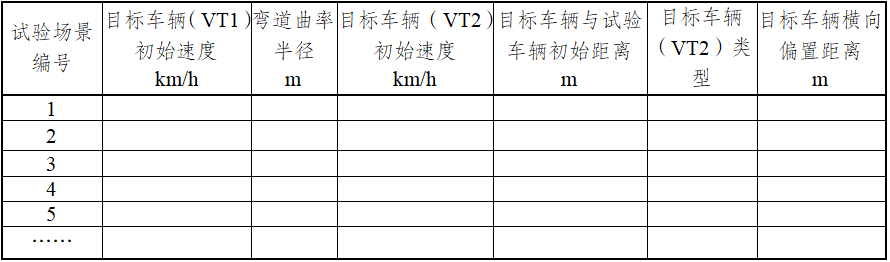
如表4和表5所示,表4是本场景中保持常量的参数,表5是本场景中进行泛化的参数,应将表4的所有参数与表5任意一行参数进行组合,构成具体试验场景。
如表4和表5所示,表4是本场景中保持常量的参数,表5是本场景中进行泛化的参数,应将表4的所有参数与表5任意一行参数进行组合,构成具体试验场景。
表4 弯道车道保持试验场景一般参数列表
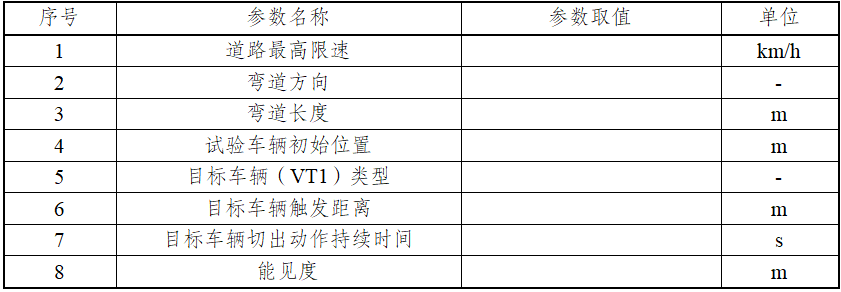
表5 弯道车道保持试验场景列表
3.1.2 试验步骤
应根据表4和表5组成的具体试验场景进行仿真试验,试验步骤应符合以下要求:
a)试验初始时,试验车辆(VUT)稳定跟随前方目标车辆(VT1),从初始位置(D0VUT)以初始速度(V0VT1)与目标车辆(VT1)在右侧车道内沿车道中心线行驶。同时,目标车辆(VT2)以初始速度(V0VT2),与试验车辆相对纵向距离(D0VUT_VT2)和横向偏置距离(DYVT2_LC)在试验车辆左侧相邻车道行驶。
b)当试验车辆(VUT)跟随目标车辆(VT1)进入弯道后,且目标车辆(VT1)与弯道终点相对纵向距离达到目标车辆触发距离(DX0trigger_VT1)时,目标车辆(VT1)开始以某一合理轨迹,按照切出动作持续时间(To-VT1)和预设速度(V0VT1)匀速切出至左侧相邻车道沿车道中心线继续行驶。
c)当达到以下任一结束条件时,仿真试验结束:
1)目标车辆(VT1)完成切出动作后行驶100 m;
1)试验车辆(VUT)与任一目标车辆(VT1/VT2)发生碰撞;
2)试验车辆(VUT)停车1 s以上。
3.1.3 试验记录信息要求
应记录以下信息:
a)试验车辆(VUT)外轮廓与所有目标车辆(VT1/VT2)外轮廓的最小距离信息或判断是否碰撞的其他信息;
a)试验车辆(VUT)停车时长。
3.1.4 通过要求
试验车辆应符合以下要求:
a)试验车辆(VUT)不与任一目标车辆(VT1/VT2)发生碰撞;
b)试验车辆(VUT)在本车道内保持稳定运动;
c)试验车辆(VUT)不发出介入请求或执行最小风险策略;
d)试验车辆(VUT)未发生1 s以上停车行为。
3.2试验场景仿真示例
以3.1弯道车道保持试验项目中泛化的某一具体试验场景为例,其参数组合为:弯道方向为右转弯,弯道曲率半径500 m,目标车辆VT1和VT2均为乘用车,目标车辆(VT1)初始速度30 km/h,目标车辆(VT2)初始速度40 km/h,目标车辆(VT2)与试验车辆初始距离 -80 m,目标车辆(VT2)横向偏置距离 0.2 m,目标车辆(VT1)触发距离100 m,目标车辆(VT1)切出动作持续时间3 s。仿真场景运行视频如下:
6.结语
本篇文章基于欧盟法规中测试场景要求进行分析,对具体试验场景的生成提出“试验要求-场景元素-参数空间-参数组合”的逐级映射框架,分别论述标准法规测试场景清单、具体测试场景集分析流程以及车道保持试验具体场景生成框架示例。最后,基于法规的具体试验场景构建方法,以弯道车道保持试验项目为例进行仿真验证。未来,赛目科技还将从智能网联汽车国际法规方面持续横向扩展测试场景集范围,为不同等级驾驶自动化系统功能提供统一的测试基准。
参考文献
[1]Proposal for a new UN Regulation on uniform provisions concerning the approval of vehicle of vehicles with regard to Driver Control Assistance System (DCAS), 2024.
[2]01 series of amendments to UN Regulation No.157(Automated Lane Keeping Systems), 2023.
[3]COMMISSION IMPLEMENTING REUGLATION(EU) 2022/1426, 2022.
-
测试
+关注
关注
8文章
5343浏览量
126825 -
智能网联汽车
+关注
关注
9文章
1083浏览量
31104
原文标题:关于欧盟法规中测试场景的研究
文章出处:【微信号:gh_c85a8e3c0f2a,微信公众号:赛目科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
亿纬锂能荣获欧盟电池法规TÜV SÜD Mark证书
便携式示波器的技术原理和应用场景
智驾仿真测试实战之自动泊车HiL仿真测试

太阳膜测试仪的技术原理和应用场景
电源测试设备——NSAT-8000自动化测试系统在电源模块测量中的应用

中国信通院采用罗德与施瓦茨设备用于EEI法规测试
聚焦欧盟电池法规,TÜV南德与天合储能签署电池法规合作协议

TSN和DDS测试解决方案

TÜV南德授予派能科技欧盟新电池法规固定式电池储能系统安全证书

特斯拉FSD Beta测试版预计将在今年10月正式开启在欧盟的测试!


罗德与施瓦茨和SmartViser合作演示针对新EEI法规的测试解决方案
罗德与施瓦茨携手SmartViser开发符合欧盟最新EEI法规的测试方案
通用CPU性能基准测试的研究现状






 工商网监
工商网监
评论