 采用背照式技术的新型科学 CMOS 相机
采用背照式技术的新型科学 CMOS 相机

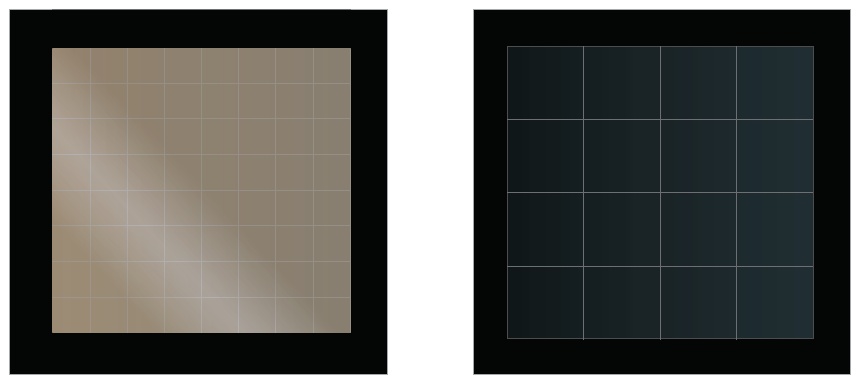
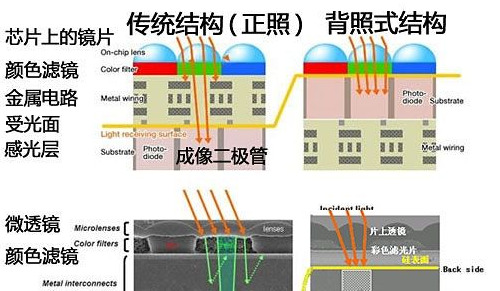
图 1.典型的前照式 CCD/sCMOS 传感器(左)在外观上是反射性的,而背照式传感器(右)则显得较暗。
概述
微光科学相机是从量子成像到天文学等许多革命性发现的背后。五十多年来,CCD 相机及其变体 -电子倍增 CCD (EMCCD)和增强型 CCD (ICCD)相机 - 提供了科学成像和光谱应用所需的单光子灵敏度和适中的帧速率。
最近,能够实现低读取噪声和更高帧速率的科学 CMOS (sCMOS)相机在多种应用中已成为 CCD 相机的替代品。然而,第一代sCMOS 器件由于其前照式架构而导致灵敏度不足,这对其量子效率(即每个像素中检测到的入射光子的比例)施加了根本限制。
借助最新的 CMOS 制造技术,最终可以使用背照式传感器架构创建 sCMOS 器件。因此,sCMOS 传感器现在能够实现类似 CCD 的量子效率(>95%) 和动态范围,而不会影响其众所周知的低读取噪声和高帧速率。
最新一代 sCMOS 相机(例如Princeton Instruments 的KURO™)充分利用了背照式传感器技术,比上一代前照式 sCMOS 相机有了显着改进。
背照式 sCMOS 相机技术是光学探测器的有力竞争者,适用于多种应用,包括高光谱成像、天文学、冷原子成像、量子成像、荧光光谱和高速光谱。本技术说明将介绍新技术的显着特点和性能特征。
背照式架构
背照式技术多年来一直用于科学 CCD 探测器。由于背照式探测器在更宽的光谱区域(深紫外到近红外)具有更高的灵敏度,因此在天文学、拉曼光谱和生物成像等超低光应用中,背照式探测器比前照式探测器更受青睐。前照式和背照式传感器之间的差异一目了然。前照式传感器在外观上是反射性的,因为大部分入射光都会反射回观察者,而背照式传感器由于吸收了大部分入射光而显得更暗(参见图 1)。
KURO 采用背照式传感器架构,就像现有最灵敏的 CCD 探测器一样。背照式技术使这款新型 sCMOS 相机系统能够提供>95% 的量子效率和100% 的填充因子(见图 2)。
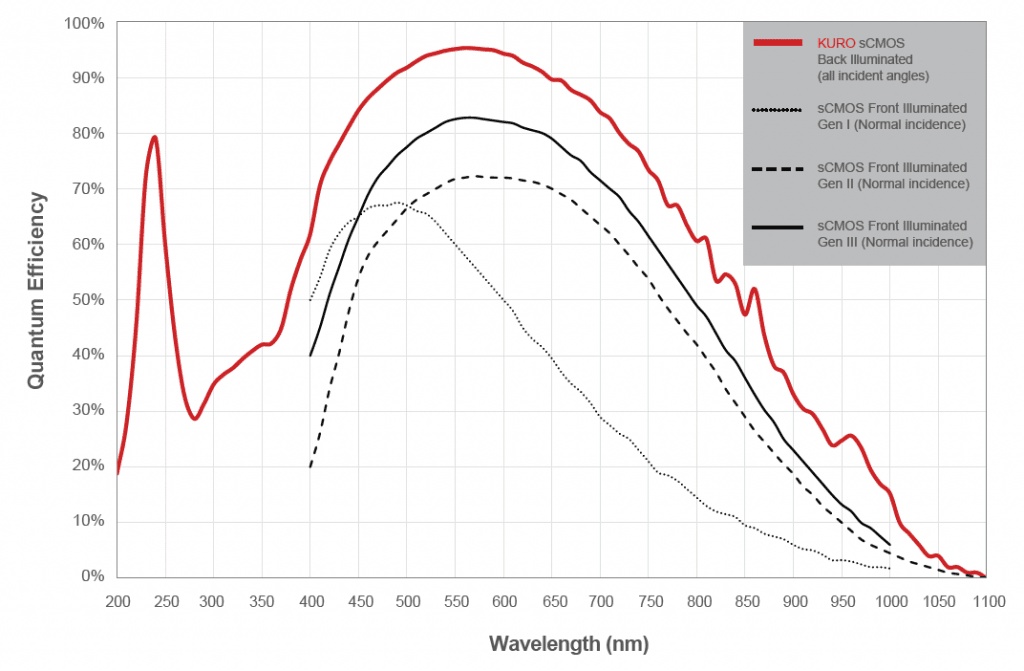
图 2.背照式 sCMOS 技术在包括紫外线在内的宽光谱范围内提供比前照式 sCMOS 传感器更高的量子效率。
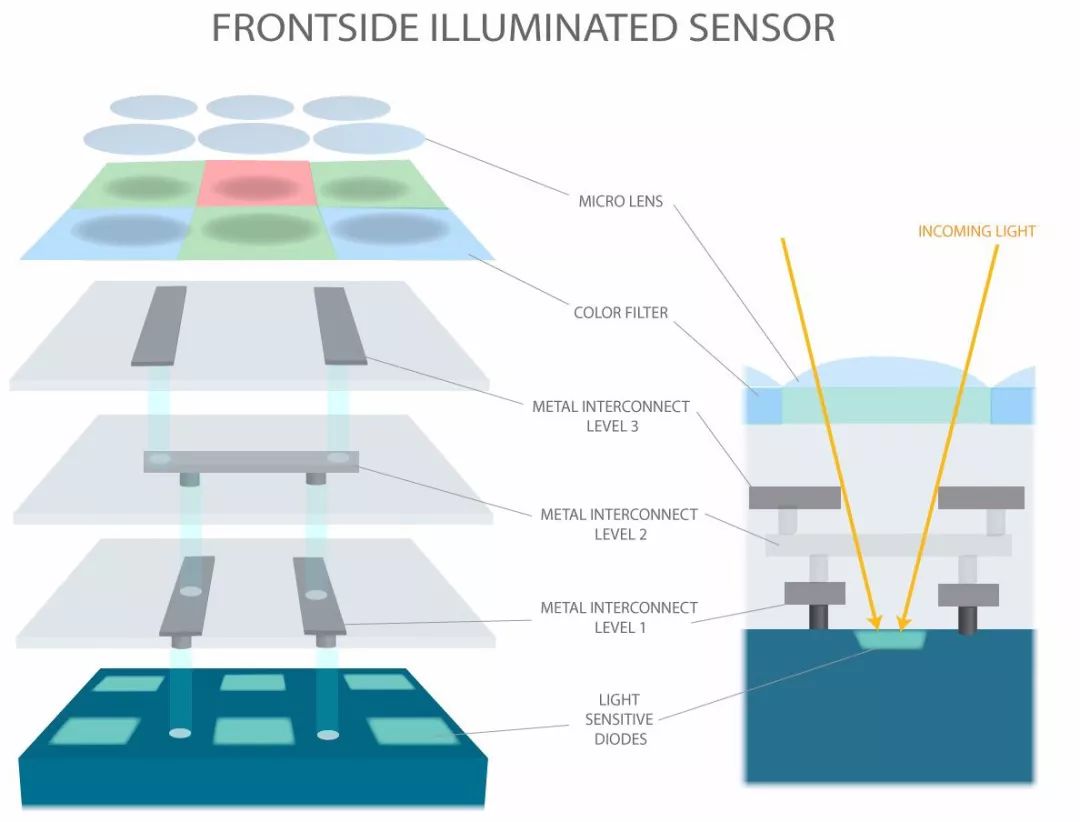
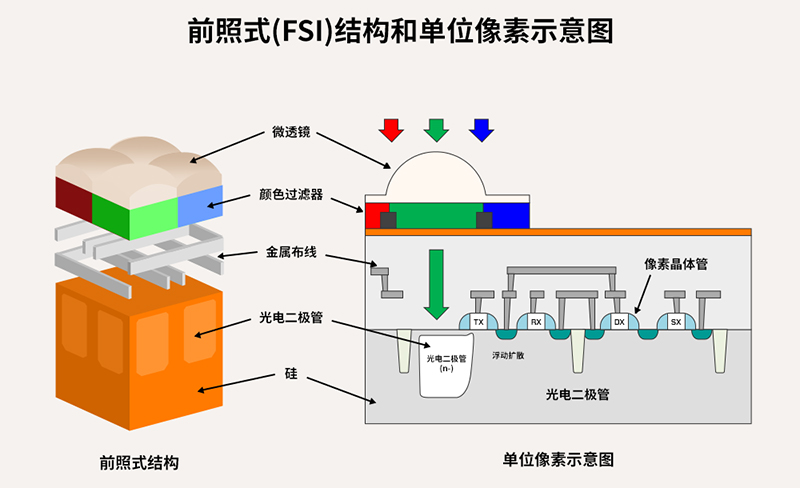
由于前照式 sCMOS 传感器的每个像素内都有读出/转换电路,因此每个像素中只有一部分对光敏感。这部分被称为像素的“填充因子”。大多数前照式 sCMOS 传感器在每个像素顶部都有微透镜,可将入射光重新聚焦到像素的感光部分并增加有效填充系数(见图 3)。
尽管微透镜有助于提高前照式传感器的光收集效率,但它们也存在某些缺点,限制了大多数 sCMOS 相机的性能。请注意,与声称峰值量子效率约为 80% 的前照式 sCMOS 传感器不同,背照式 sCMOS 传感器不使用任何微透镜。
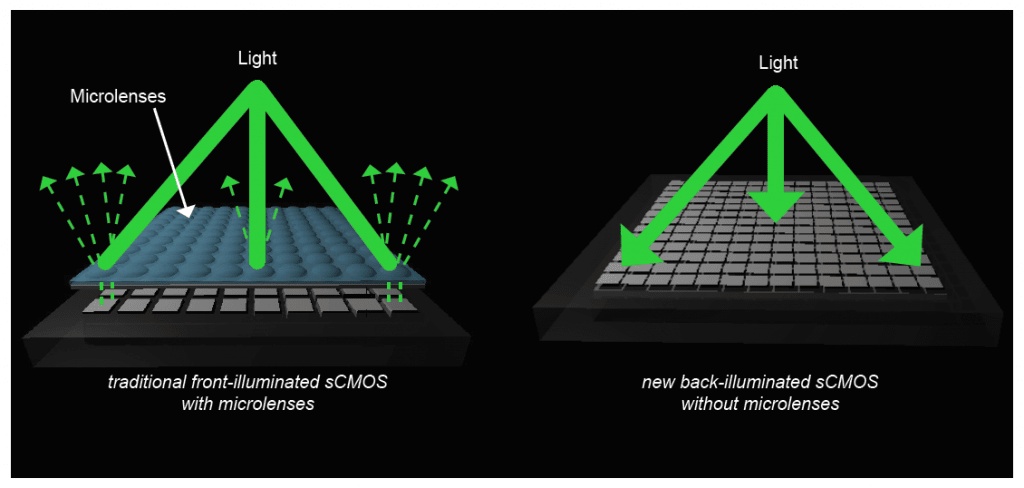
图 3.典型的前照式 sCMOS 传感器架构(左)依赖于微透镜的使用。背照式 sCMOS 传感器(右)不使用微透镜。
不幸的是,只有当光的入射角垂直于传感器表面时,微透镜才最有效(见图 4)。如果光以任何其他角度进入传感器,就像大多数科学成像和光谱应用的情况一样,微透镜的功效会大大降低 - 特别是在更宽的入射角(显微镜用语中的“高数值孔径”)下。
虽然这种量子效率与入射角的关系并未在相机或传感器制造商的文献中广泛发表,但当需要超低光性能时,这种退化才是令人担忧的真正原因。尽管各个 CMOS 制造商已经改进了微透镜的布局,但光响应的角度依赖性会导致不均匀性,尤其是在传感器的边缘。
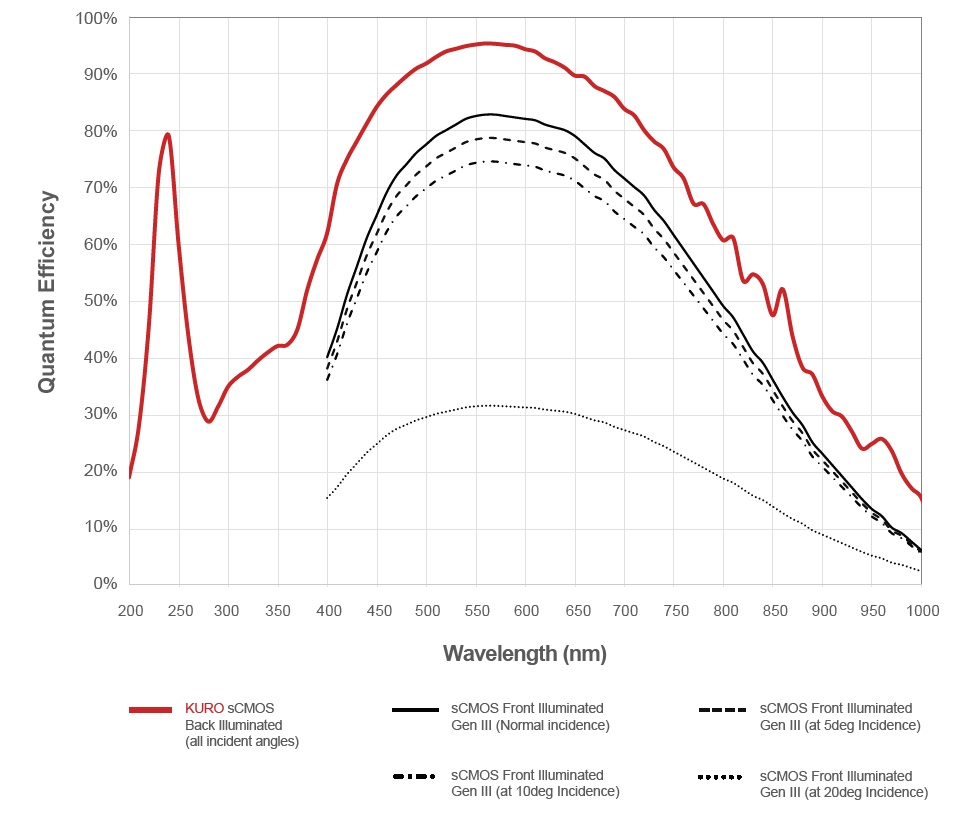
图 4.前照式 sCMOS 传感器通常依赖于微透镜,当光以除垂直于传感器表面的任何角度入射时,微透镜会显着降低量子效率。新型背照式 sCMOS 传感器不会出现这种性能限制。
此外,这些微透镜通常由类似塑料的材料制成,在紫外线范围(低于 400 nm)内传输非常差或根本不传输。背照式 sCMOS 传感器架构中缺少微透镜,这意味着在紫外线范围内具有出色的响应(见图 2 和 4)。
高帧速率和低读取噪声
背照式 sCMOS 相机(例如 KURO)提供非常高的帧速率,在全 1200 x 1200 分辨率下高达 82 fps,并且具有极低的1.3 e-rms(中值)读取噪声。 KURO 相机每秒能够以较低的分辨率传输数百帧(参见表 1)。尽管 sCMOS 传感器通常不支持片上合并,但它们确实允许在帧采集后进行“片外”软件合并。
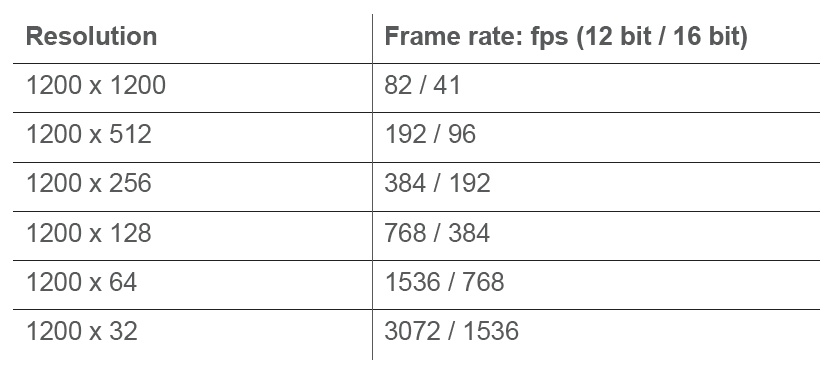
表 1.低读取噪声和高帧速率使新型背照式 sCMOS 相机成为高速光谱应用的理想选择。
值得注意的是,新型背照式 sCMOS 传感器的11 μm 2像素间距比其他 sCMOS 传感器捕获的光子多 2.8 倍。每个像素还可以处理80,000 个电子的大满阱,从而实现出色的动态范围(61,500:1 或 95 dB)。
减少固定模式噪声
KURO 背照式相机采用最新的 sCMOS 制造技术以及优化的电子器件。因此,它的噪声分布明显优于任何前照式 sCMOS 相机(见图 5)。
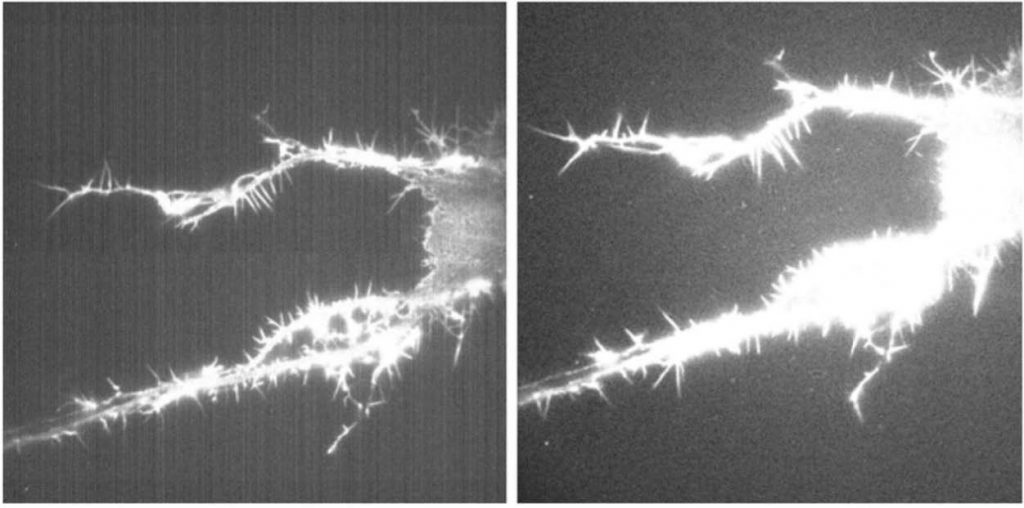
100 帧平均前照式 背照式 sCMOS 相机sCMOS 相机
图 5.固定模式噪声:前照式 sCMOS 传感器(左)与背照式 sCMOS 传感器(右)。
传感器比较
表 2 简单总结了与前照式sCMOS 和最近推出的背照式sCMOS 传感器相关的几个关键规格和性能。

表 2.前照式 sCMOS 和背照式 sCMOS 传感器的比较。
读出模式:滚动快门和全局快门
CMOS 传感器的主要特性之一是滚动电子快门模式的可用性。这与全局快门或“快照”模式不同,后者同时曝光所有像素。当物体需要及时“冻结”时,优先全局快门;然而,与卷帘快门模式相比,此模式通常会导致读取噪声增加1.5 至 2 倍,同时帧速率降低 2 倍。
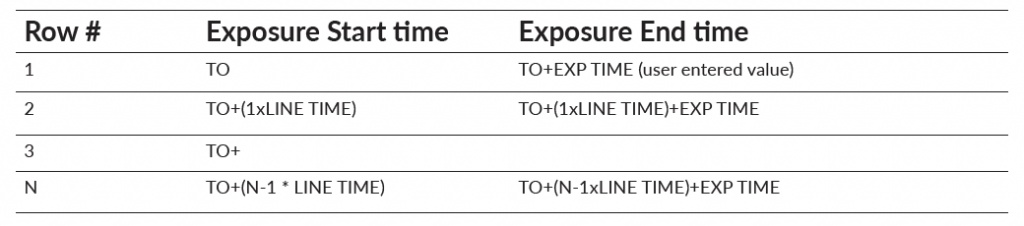
在卷帘快门模式下,传感器的第一行首先曝光,第二行在一行读取时间后曝光,依此类推。换句话说,传感器的最后一行在第一行之后的“(N-1) x 行时间”处曝光。当查看发生速度明显快于帧速率的高速事件时,这可能会导致图像伪影,但只要帧速率足够高,大多数科学应用程序都可以使用卷帘快门模式。另一方面,全局快门模式更适合被检查物体快速移动的工业成像应用。
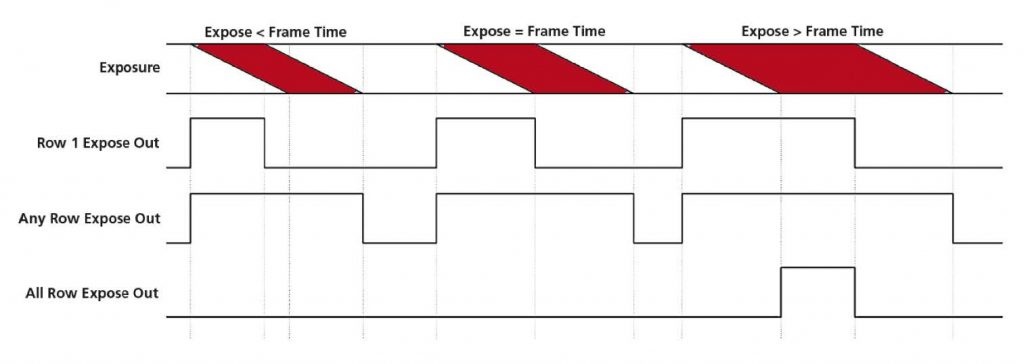
先进的相机设计,例如 KURO 的设计,提供了一种触发外部光源/快门的方法,从而创建“伪”全局快门模式。为此,相机只需输出一个TTL 信号,该信号在“所有”像素曝光时变高。实际上,这将导致像素在事件被照亮时拍摄该事件的快照。图 6 显示了KURO 相机的卷帘快门和“伪”全局快门模式的时序图。
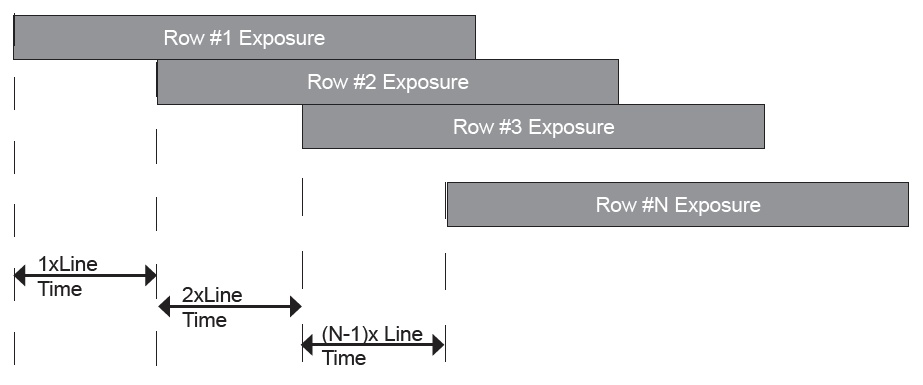
图 6.卷帘快门和“伪”全局快门模式的时序图。
哪种传感器技术:CCD、EMCCD、ICCD 或背照式 sCMOS?
科学家和工程师应该仔细考虑哪种传感器技术最适合他们的应用。一般来说,对于需要延长积分时间(秒到小时)的成像或光谱应用,CCD 或 EMCCD 相机仍然是优先。对于需要片上装箱的光谱应用也是如此。
同时,对于需要超快门控的时间分辨应用,增强型相机(ICCD 或 emICCD)是比较好选择。背照式 sCMOS 相机以相对较短的集成时间(小于 10 秒)提供所有其他应用所需的灵敏度和帧速率。表 3 总结了这些传感器技术的几个关键特性,并为不同应用提供了一些一般建议。
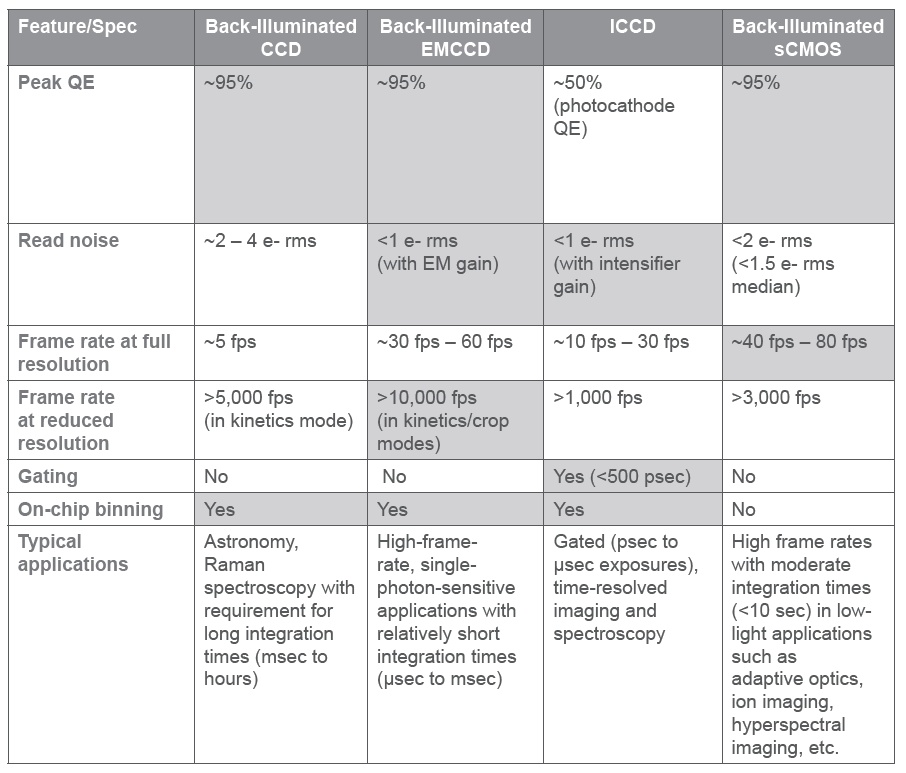
表 3.传感器特性与应用建议的比较。
相机生态系统
背照式 sCMOS 技术的优势固然重要,但充分利用这种新型传感器的固有优势的能力也同样重要。KURO专为在 Princeton Instruments LightField®软件生态系统中运行而设计,易于控制,并且可以快速集成到无数成像和光谱实验中。与MathWorks 的 MATLAB ® 和National Instruments 的 LabVIEW®一起使用的相机集成也快速而简单。还提供全套输入输出 TTL 信号,可以轻松将相机操作与外部事件或光源同步。
审核编辑 黄宇
-
CMOS
+关注
关注
58文章
6242浏览量
243592 -
光谱
+关注
关注
4文章
1064浏览量
37452
发布评论请先 登录
背照式CMOS传感器怎么样?
Aptina新型1.1/1.4微米背照式(BSI)图像传感器
一文读懂背照式cmos传感器技术原理和应用
SmartClarity推出两款500万像素背照式CMOS图像传感器
背照式sCMOS相机提供更好原始图像质量

重磅发布 | 深视智能全新背照式制冷sCMOS相机上市,突破灵敏度和噪声极限



评论