 【CW32模块使用】微波多普勒无线雷达传感器
【CW32模块使用】微波多普勒无线雷达传感器
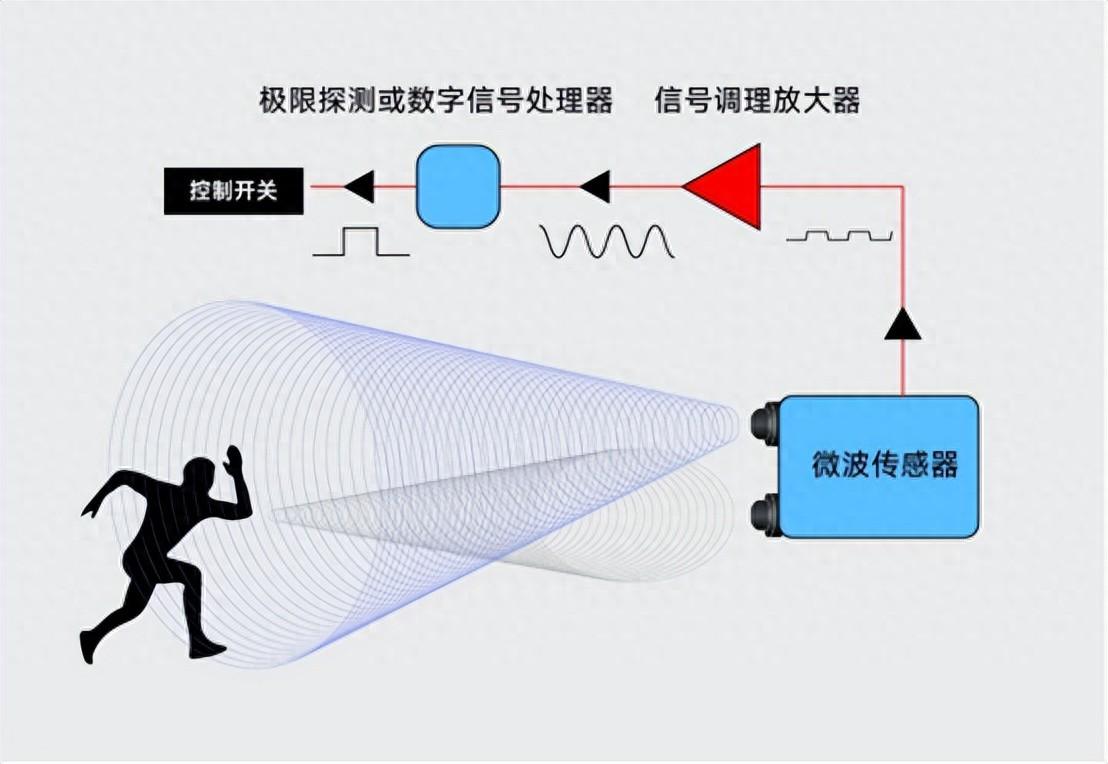
微波运动传感器是利用多普勒雷达原理设计的微波移动物体探测器。不同于一般的红外探测器,微波传感器通过通过检测物体反射的微波来探测物体的运动状况,检测对象将并不会局限于人体,还有很多其他的事物。微波传感器不受环境温度的影响,探测距离远,灵敏度高,被广泛应用于工业、交通及民用装置中,如车辆测速、自动门、感应灯、倒车雷达等。由于微波传感器检测对象存在普遍性,在实际的生活应用中,会搭配另一个传感器来做针对性的检测。如微波传感器+红外热释电传感器,能够有效的判断是否有人经过,不会被阳光,被衣物颜色所干扰,也不会对其他物体产生反应。
一、模块来源
模块实物展示:

资料下载链接:
https://pan.baidu.com/s/110NZE7hM3ifS1ho53fxmoA
密码:2cz6
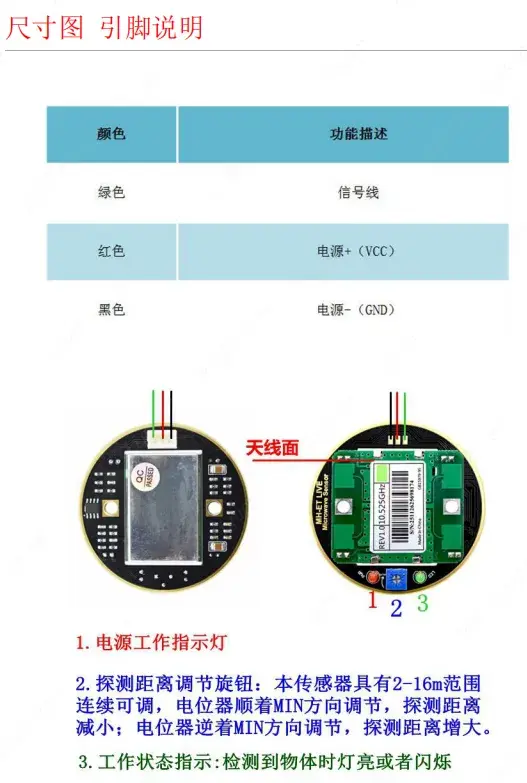
二、 规格参数
工作电压:5V±0.25V
工作电流:30~50mA
探测距离:2-16m 连续可调
尺寸: R=30.6mm
输出方式: GPIO
管脚数量:3 Pin
以上信息见厂家资料文件
三、移植过程
我们的目标是将例程移植至CW32F030C8T6开发板上【能够判断测量一定距离内是否物体运动】。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。
3.1查看资料
由于微波传感器检测对象存在普遍性,即只要有物体动作,都能够检测到,因此只需要检测OUT引脚的高低电平变化即可。
3.2引脚选择
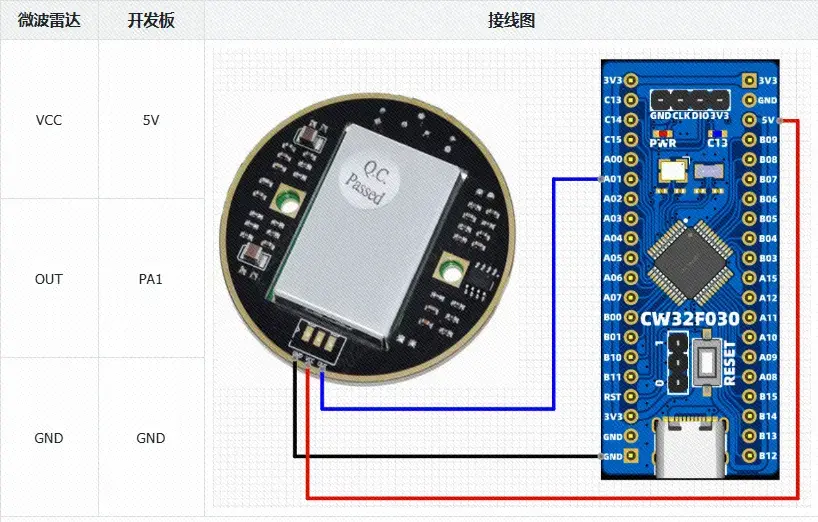
模块接线图
3.3移植至工程
移植步骤中的导入.c和.h文件与【CW32模块使用】DHT11温湿度传感器相同,只是将.c和.h文件更改为bsp_mh100x.c与bsp_mh100x.h。这里不再过多讲述,移植完成后面修改相关代码。
在文件bsp_mh100x.c中,编写如下代码。
/*
* Change Logs:
* Date Author Notes
* 2024-06-20 LCKFB-LP first version
*/
#include "bsp_mh100x.h"
#include "board.h"
#include "stdio.h"
/******************************************************************
* 函 数 名 称:MH100X_GPIO_Init
* 函 数 说 明:MH100X初始化
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LC
* 备 注:无
******************************************************************/
void MH100X_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct; // GPIO初始化结构体
RCC_OUT_ENABLE(); // 使能GPIO时钟
GPIO_InitStruct.Pins = GPIO_OUT; // GPIO引脚
GPIO_InitStruct.Mode = GPIO_MODE_INPUT_PULLUP; // 上拉输入
GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; // 输出速度高
GPIO_Init(PORT_OUT, &GPIO_InitStruct); // 初始化
}
/******************************************************************
* 函 数 名 称:OUTPIN_Scanf
* 函 数 说 明:返回OUT引脚电平状态
* 函 数 形 参:无
* 函 数 返 回:1=未检测到物体移动 0=检测到物体移动
* 作 者:LC
* 备 注:无
******************************************************************/
char OUTPIN_Scanf(void)
{
return OUT_IN;
}在文件bsp_mh100x.h中,编写如下代码。
/*
* Change Logs:
* Date Author Notes
* 2024-06-20 LCKFB-LP first version
*/
#ifndef _BSP_MH100X_H_
#define _BSP_MH100X_H_
#include "board.h"
#define RCC_OUT_ENABLE() __RCC_GPIOC_CLK_ENABLE()
#define PORT_OUT CW_GPIOA
#define GPIO_OUT GPIO_PIN_1
#define OUT_IN GPIO_ReadPin(PORT_OUT, GPIO_OUT)
void MH100X_GPIO_Init(void);//引脚初始化
char OUTPIN_Scanf(void);//微波雷达的输入状态
#endif四、移植验证
在自己工程中的main主函数中,编写如下。
/*
* Change Logs:
* Date Author Notes
* 2024-06-20 LCKFB-LP first version
*/
#include "board.h"
#include "stdio.h"
#include "bsp_uart.h"
#include "bsp_mh100x.h"
int32_t main(void)
{
board_init(); // 开发板初始化
uart1_init(115200); // 串口1波特率115200
uint8_t flag = 0;
uint16_t time = 0;
MH100X_GPIO_Init();
printf("Demo Startrn");
while(1)
{
//检测到有物体移动
if( OUTPIN_Scanf() == 0 )
{
flag = 1;
}
if( flag == 1 )
{
if( time == 0 ) //打开门
{
printf("openrn");
}
time++;
if( time >= 2000 )//超过两秒则关门
{
time = 0;
flag = 0;
printf("closern");
}
delay_ms(1);//时间基准
}
}
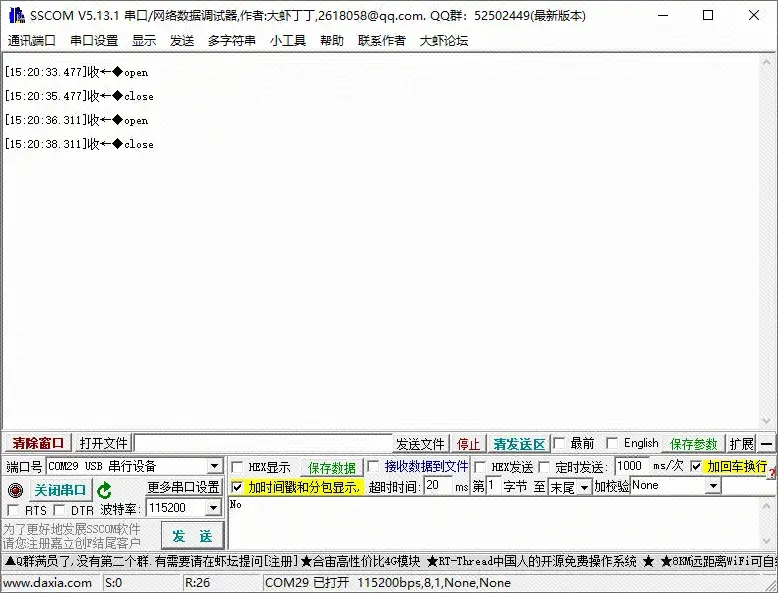
}移植现象:对准自己,当检测到移动时,发送open,超过两秒之后发送close,反复循环。
模块移植成功案例代码:
链接:https://pan.baidu.com/s/1teceTRuqamboxT4F8lULvQ?pwd=LCKF
提取码:LCKF
-
传感器
+关注
关注
2555文章
51709浏览量
758645 -
微波多普勒传感器
+关注
关注
2文章
2浏览量
4762 -
CW32
+关注
关注
1文章
220浏览量
809
发布评论请先 登录
相关推荐
【CW32模块使用】SGP30气体传感器
CW32模块使用 人体红外传感器

【CW32模块使用】雨滴传感器
基于CW32模块的火焰传感器设计
【CW32模块使用】红外测距传感器

CW32模块使用 指纹识别传感器

CW32模块使用 红外循迹传感器
5.8g微波雷达传感器:引领智能化时代,赋能多行业领域精准感知与节能应用

2024年微波雷达传感器革命:精确测量,智能未来

【项目展示】基于CW32的遥控循迹小车








 工商网监
工商网监
评论