 西门子 PLC 与川崎机器人通讯:Profinet 转 Ethernet IP 实例解析
西门子 PLC 与川崎机器人通讯:Profinet 转 Ethernet IP 实例解析
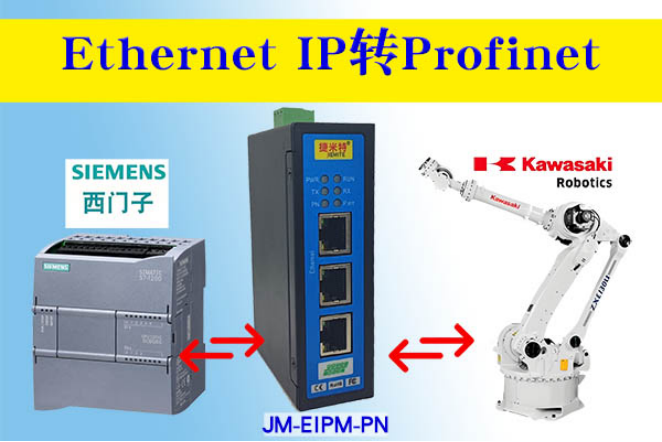
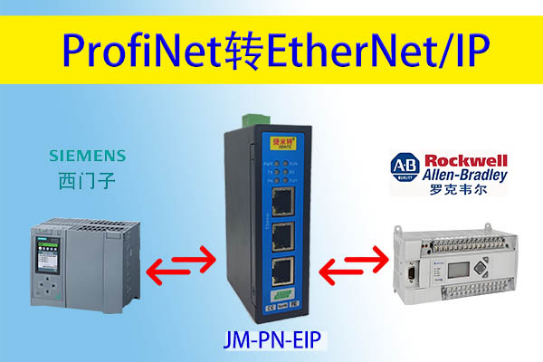
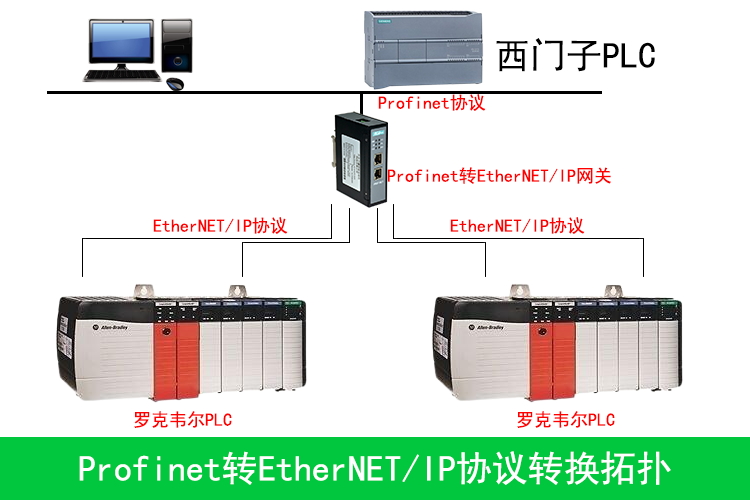
要实现从西门子PLC即PROFINET协议和川崎机器人即Ethernet/IP协议的通讯,通常需要一个通信适配器或网关,该设备能够理解PROFINET和Ethernet/IP协议,并在两者之间转换数据。下面介绍一个三方配置案例:

本产品实现连接EtherNET/IP设备和网络到PROFINET网络系统。该网关可实现双向数据交换,既允许现有的、低成本的EtherNET/IP设备集成到PROFINET网络系统,也可提供来自PROFINET的数据给EtherNET/IP设备使用。
产品特点
应用广泛:本产品应用于支持EtherNET/IP接口的变频器、伺服驱动器、智能现场测量设备、仪表、PLC、DCS、FCS等等。
配置简单:用户不必了解 EtherNET/IP和PROFINET细节,根据以下配置说明,根据要求就能配置网关,不需要复杂编程,即可在短时间内实现连接功能。
技术指标
Ø 在PROFINET一侧为PROFINET Slave;
Ø 支持标准的PROFINET I/O协议
Ø PROFINET支持的最多16个槽位,支持最大的输入字节数为1440字节,最大的输出字节为1440字节,输入输出字节的长度由TIA Portal设定
Ø 在EtherNET/IP侧,该设备将作为支持EtherNET/IP通讯主站。
最大连接数X个从站
Ø 供电:24VDC(±5%),最大功率 3.5W
Ø 工作环境温度:-50~80℃,湿度≤95%
Ø 防护等级:IP20
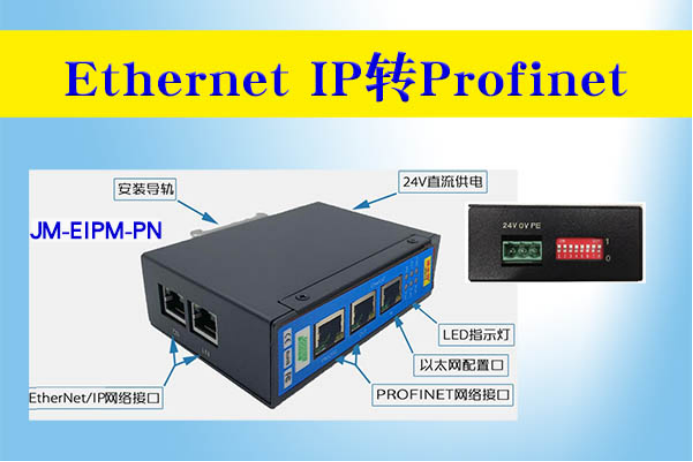
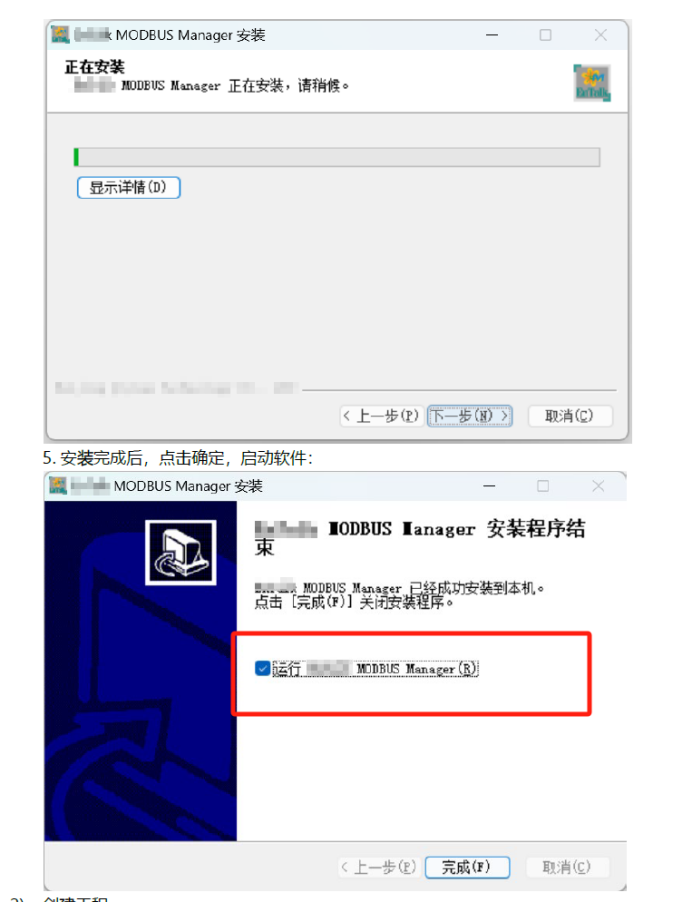
配置模块
1. 正确连接电源,通过以太网口将PN-EIP与PC相连,给PN- EIP上电;
2. 打开配置软件,根据需求在配置软件中进行配置;
3. 生成dds文件,点击工具栏中的“下载”按钮,将配置下载到PN-EIP中;
4. 网关设备正确连接PROFINET主站设备、EIP从站设备;
5. 等待大约 10秒,PN- EIP与设备之间建立连接,此时RUN灯亮,PN和OK指示灯常亮。
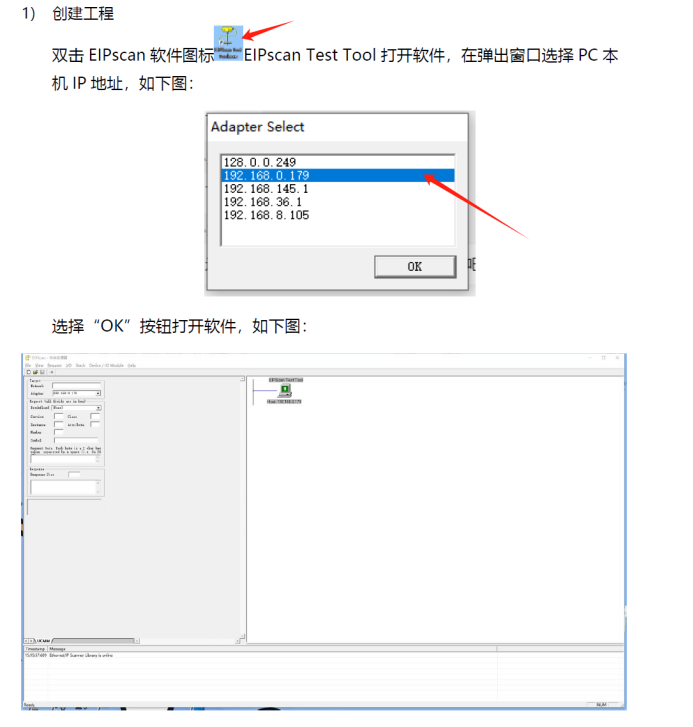
EtherNET/IP侧从站设定
川崎机器人支持 ethernetip 协议,可从 eds 文件或屏幕获取配置信息。川崎机器人作为一种高性能的工业机器人,其控制系统通常支持多种通信协议,包括 ethernetip 协议。在进行设备连接和配置时,可以通过导入机器人的 esd 文件来获取相关的配置信息。此外,也可以直接在机器人的操作屏幕上进行参数设置和查看。这些配置信息包括机器人的 IP 地址、端口号、数据输入输出长度等重要参数。
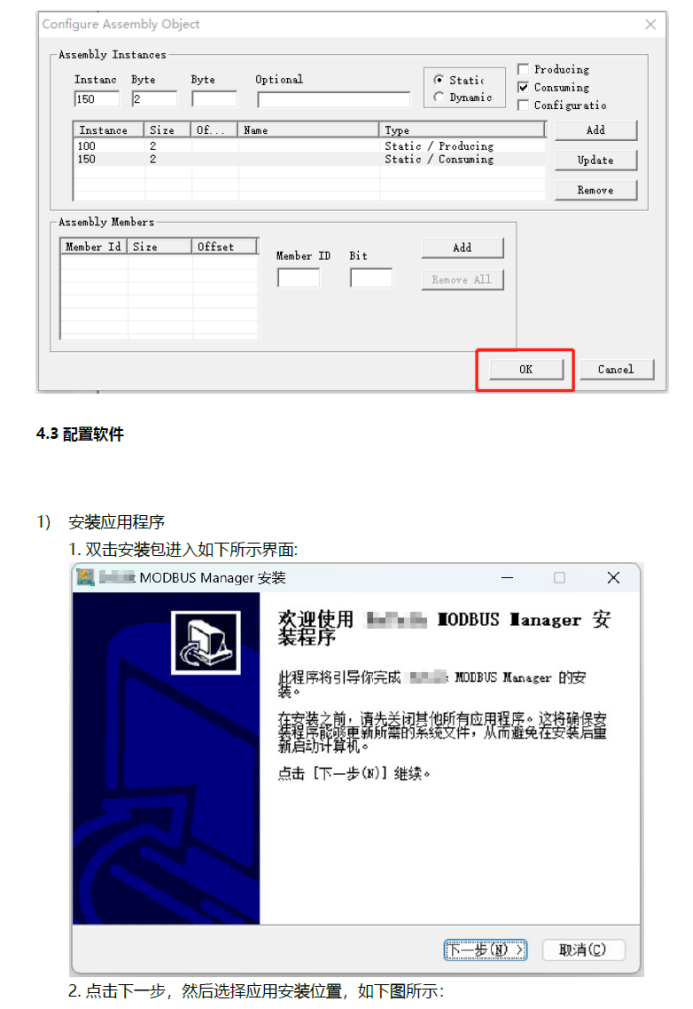
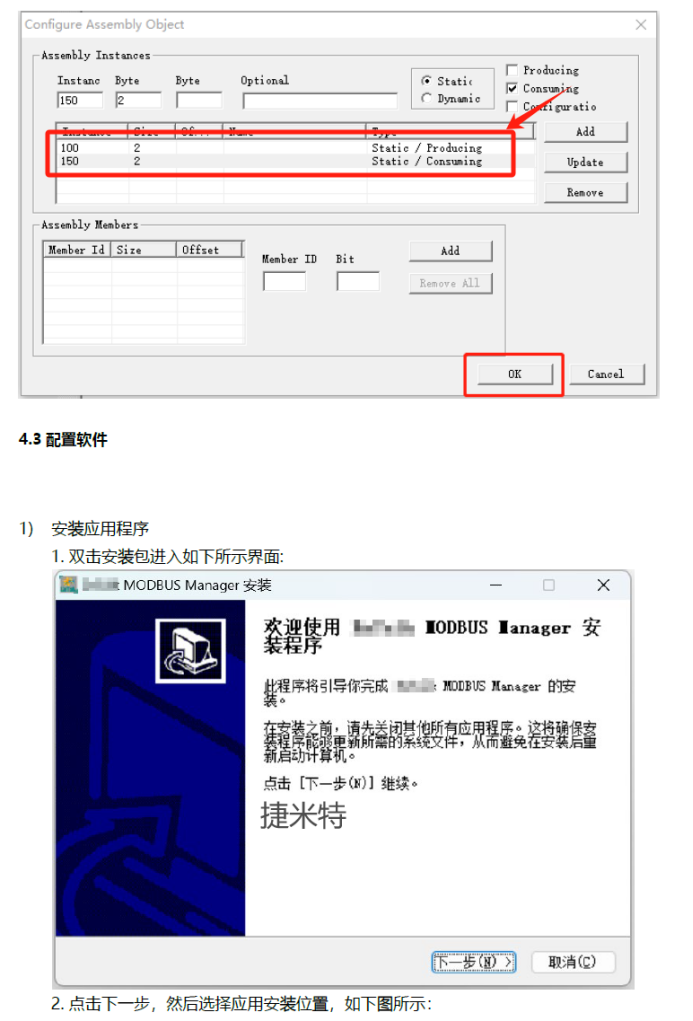
2) 添加EIP模拟从站配置
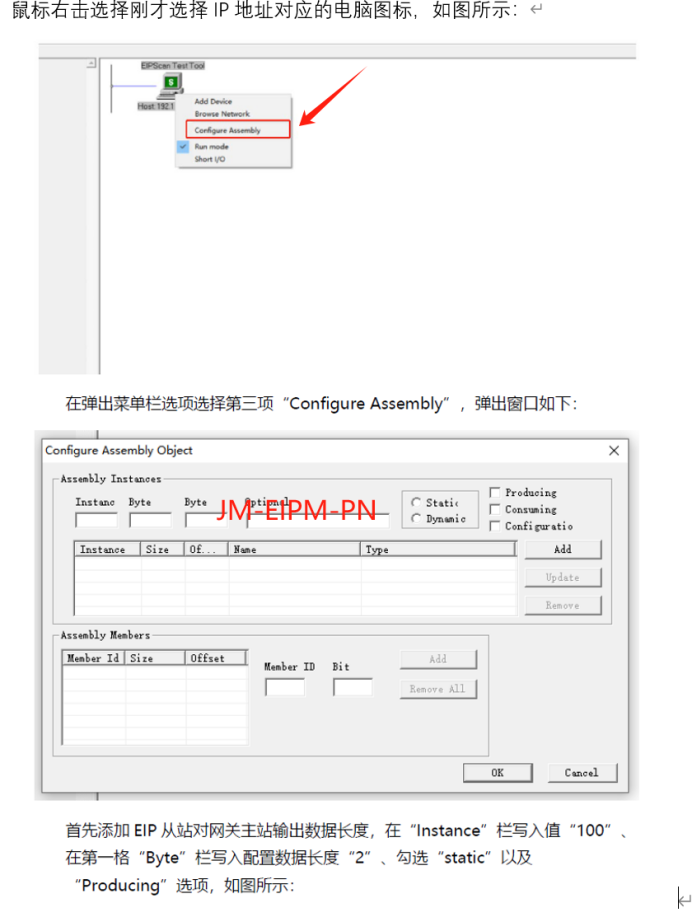
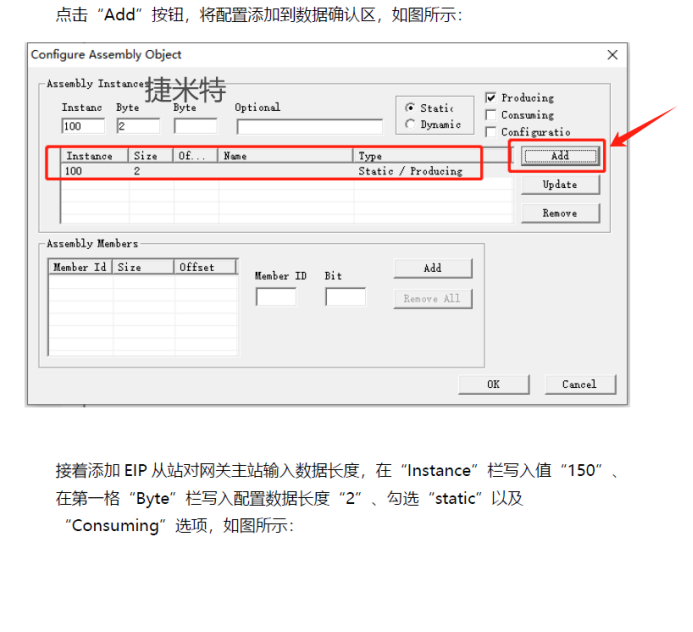
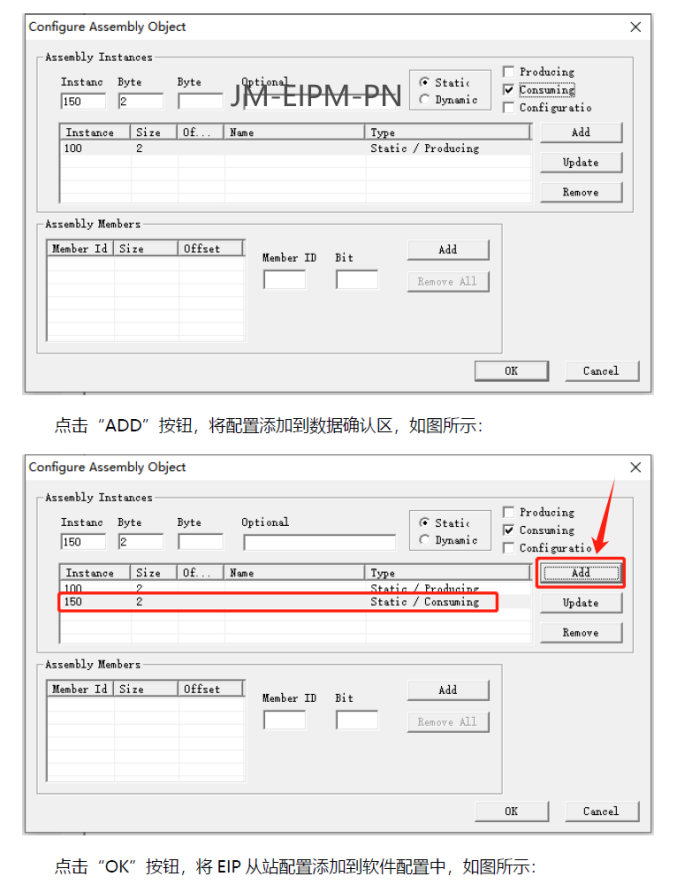
确认配置信息与实际机器人一致,为数据采集做准备。在获取了配置信息后,需要仔细核对这些信息与实际的机器人是否一致。这一步非常关键,因为任何错误的配置都可能导致数据采集失败或者通信异常。只有确保配置信息准确无误,才能为后续的数据采集工作做好充分的准备。例如,要确认机器人的 IP 地址是否正确设置,端口号是否与网关的配置相匹配,数据输入输出长度是否符合实际需求等。
审核编辑 黄宇
-
机器人
+关注
关注
211文章
28318浏览量
206819 -
plc
+关注
关注
5010文章
13234浏览量
462704 -
西门子
+关注
关注
94文章
3027浏览量
115754 -
Profinet
+关注
关注
6文章
1131浏览量
23368 -
Ethernet IP
+关注
关注
0文章
13浏览量
5531
发布评论请先 登录
相关推荐
Profinet 转 EtherNet/IP 网关怎样化解西门子 S7 - 1500 PLC 与 AB PLC 之间的通讯难题
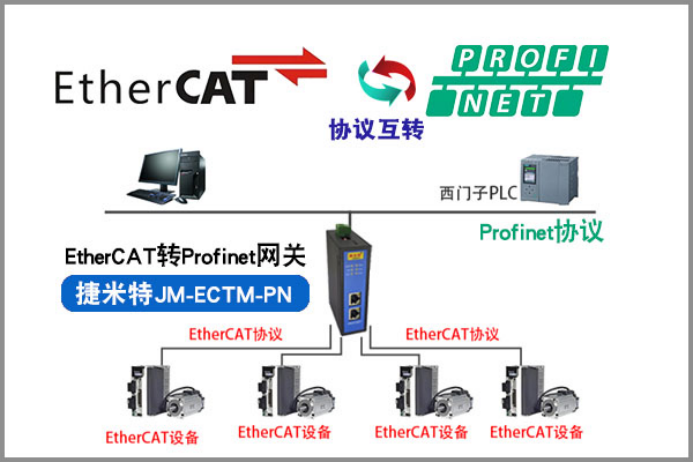
基于 EtherCAT 转 ProfiNet 网关达成西门子 1200 PLC 与伺服电机通讯连接的应用实例
论水处理中的开疆智能Profinet转Ethernet/IP主站网关连接Endress+Hauser液体流量计配置案例

打通工业通信壁垒实现Ethernet/ip转profinet网络互通

打通工业通信壁垒实现Ethernep/ip转profinet网络互通

EtherNetIP转Profinet网关连接发那科机器人配置实例解析

通过EtherNetIP转Profinet网关实现跨品牌EthernetIP协议的PLC通讯
EtherNet/IP转PROFINET罗克韦尔PLC与西门子PLC通讯案例
Modbus转Ethernet IP网关模块与汇川PLC通讯案例

ABB机器人与西门子PLC的Profinet通讯设置
Profinet转Ethernet IP网关在汽车配件生产中的应用
西门子PLC与FANUC机器人如何实现EtherNet/IP通信

EtherCAT主站转Ethernet/IP网关

Profinet主站转Ethernet/IP网关






 工商网监
工商网监
评论