 华为发布驾驶员行为异常检测新专利
华为发布驾驶员行为异常检测新专利
近日,华为技术有限公司公布了一项名为“一种驾驶员行为异常检测方法和装置”的新专利。这一专利的公布,标志着华为在智能交通系统领域的又一重要突破。
据悉,该专利通过获取第一对象的行为信息、第一车辆的驾驶员行为信息以及驾驶员的注意力信息,实现了对驾驶员行为的全面监测和分析。在判断驾驶员行为是否异常时,该方案不仅识别驾驶员的具体行为,还深入探究行为的触发原因,并评估驾驶员对触发原因的关注程度。这种综合考量方式,使得驾驶员行为异常检测的准确性和鲁棒性得到了显著提升,从而进一步增强了车辆驾驶的安全性能。
随着自动驾驶技术的持续进步,对驾驶员行为的监测和分析在智能交通系统中的重要性日益凸显。华为的这项专利不仅为汽车行业提供了有力的技术支持,也为其他需要实时监控驾驶员行为的场景,如公共交通、物流运输等,带来了全新的解决方案。
可以说,华为的这项新专利不仅展现了其在智能交通系统领域的创新实力,也为推动整个行业的进步和发展做出了积极贡献。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
华为
+关注
关注
216文章
34472浏览量
252008 -
智能交通
+关注
关注
12文章
804浏览量
43493 -
鲁棒性
+关注
关注
2文章
47浏览量
12803
发布评论请先 登录
相关推荐
守护驾驶安全,驾驶员监控系统DMS应用解决方案
监控更加高效和精准。图片来源于网络驾驶员监测系统主要通过传感器、摄像头收集驾驶员的面部图像,定位头部姿势、人脸特征及行为特征,并通过各种异常驾驶

海康汽车&森思泰克推出全新一代DMS一体机解决方案
司机疲劳驾驶、分心驾驶等不良驾驶行为会给交通安全埋下极其危险的事故隐患。基于市场需求,海康汽车&森思泰克推出全新一代DMS一体机解决方案。 全新一代DMS一体机集成红外摄像头,通过对
借助瑞萨Reality AI软件提高自动驾驶安全性
随着汽车自动驾驶功能的日益普及,对驾驶员或车辆操作员的依赖越来越少,这意味着具有更高自主性的产品将需要复制驾驶员或操作员将执行的所有各种活动
智能驾驶与传统驾驶的区别
,实现自主感知、判断并做出行驶决策。 能够在道路上自行运行、避让障碍物,并自主完成驾驶任务,不需要人工干预或仅需有限的人工监控。 传统驾驶 : 依赖人类驾驶员进行操控,驾驶员需要时刻注
雨刮器压力分布检测wipe有用吗?
介绍:
一、检测的重要性
确保清洁效果 :雨刮器的主要功能是在雨天或挡风玻璃脏污时清除雨水、灰尘和其他杂物,以保持驾驶员的视线清晰。均匀的压力分布可以确保雨刮器胶条与挡风玻璃充分接触,从而实现高效的清洁
发表于 09-23 14:59
通过实时盲区检测提高车辆安全性
车载汽车安全系统通过检测驾驶员盲区中是否存在相邻车辆,并警告驾驶员可能发生的事故来防止发生车祸。驾驶员可以使用此信息来安全地变道。在本文中,我们将讨论盲区


用于驾驶员监控系统的NIR LED驱动器套件STR-DMS-NCV7694-GEVK系列数据手册
电子发烧友网站提供《用于驾驶员监控系统的NIR LED驱动器套件STR-DMS-NCV7694-GEVK系列数据手册.rar》资料免费下载
发表于 04-26 17:32
•0次下载
用于驾驶员监控系统的近红外LED驱动器STR-DMS-NCV7694-GEVB数据手册
电子发烧友网站提供《用于驾驶员监控系统的近红外LED驱动器STR-DMS-NCV7694-GEVB数据手册.rar》资料免费下载
发表于 04-26 17:22
•0次下载
赋能厂商加速出海 虹软驾驶员分心警告系统欧洲ADDW测试圆满收官
作为全球三大主要汽车市场之一的欧洲,对汽车安全技术的要求日益严格。根据《欧盟法规REGULATION (EU) 2023/2590》,M和N类机动车辆将需要于2024年7月7日起开始适用驾驶员分心警告(“ADDW”)系统。
华为公开智能驾驶新专利:可识别唇语并报警
华为技术有限公司最近公开了一项关于“报警方法、装置以及智能驾驶设备”的新专利,这项创新技术为智能驾驶领域注入了新的活力。
Smart Eye宣布获得车队驾驶员监控系统AIS突破性订单
Smart Eye将向欧洲一家大型商用车制造商的两款中型卡车提供其车队驾驶员监控系统。根据产品生命周期销量预测,该订单的预计收入为1.5亿瑞典克朗。
科大讯飞高空抛物检测专利获授权
近日,科大讯飞成功获得了一项名为“高空抛物检测方法、装置、计算机设备和存储介质”的专利授权。该专利主要针对高空抛物行为的自动检测,通过创新的
优步与特斯拉达成合作,推动美国驾驶员使用电动汽车,实现“零排放”目标
优步承诺,除了现有的联邦税收优惠(最高达7500美元),公司还将给予驾驶员额外的专属购车奖赏,高达2000美元(相当于在中国约人民币14400元)。至今为止,优步已有超过7.4万名活跃电动汽车驾驶员遍布于美加欧三地。
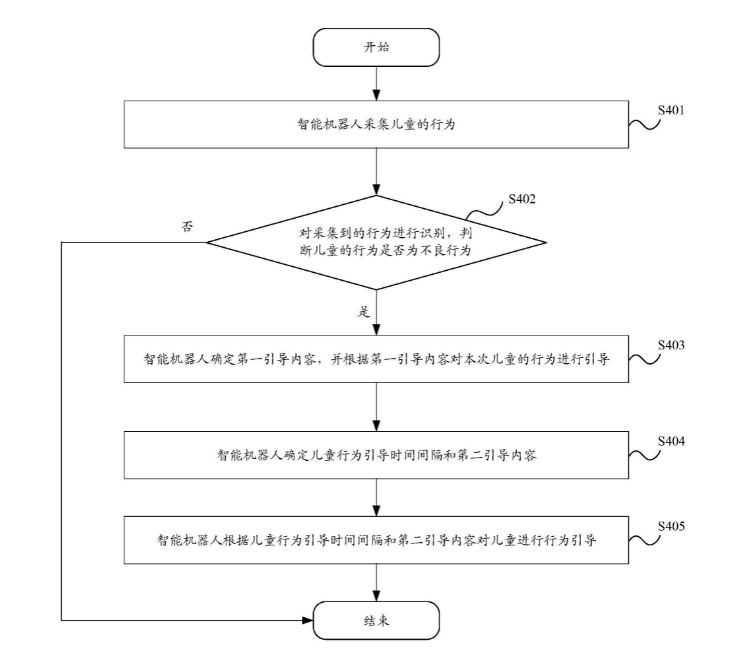
华为公开儿童行为引导专利
其摘要内容指出,该方法首先识别儿童不良行为并进行初次引导;随后针对不良行为发生次数及初次引导后改善情况开展进一步引导;根据每个孩子的不良行为特性与接收成效来精确判定最合适的引导时机,制定针对性策略以增强记忆、改善不良





 工商网监
工商网监
评论