 永磁同步电机全速域无感控制策略
永磁同步电机全速域无感控制策略
永磁同步电机因其高效能、高功率密度和良好的控制特性,在现代工业和消费(如新能源电动汽车)中被广泛使用。在永磁同步电机中,位置传感器可以实时提供转子位置反馈,使得电机控制可以更加精确和高效,然而位置传感器的使用也同时增加了系统的成本和复杂度。设计与开发无位置传感器的电机机控制方法(无感控制)已经成为一种趋势!在 MathWorks 赞助的今年第十九届研究生电子设计竞赛中,来自上海工程技术大学的高英杰、王育洁和吴琪欢三位同学所组成的未来使者团队,设计与开发了一种基于混合观测器的内置式永磁同步电动机(IPMSM)全速域无感控制策略,解决了“零低速域平稳启动”及“顺滑过渡到中高速域”的问题,有效地提高了IPMSM的性能和可靠性。他们使用 MATLAB 和 Simulink 构建仿真模型、半实物仿真平台和原理样机,验证了所提出的控制策略。 未来使者团队合影 未来使者团队同时获得了全国技术赛三等奖和 MathWorks 企业专项奖的二等奖。他们使用MATLAB和Simulink提高了设计与开发效率,节约了时间和成本。以下是未来使者的分享:
概述
绿色低碳发展已经成为全球发展潮流,对作为新能源汽车动力系统核心部件主驱电机的关键性能参数与经济参数提出了更高要求。国内外对于永磁同步电机的无位置传感器算法已有较多深入研究,根据速域可将研究成果分为两类——零低速域与中高速域。
在零低速域,大部分利用电机内部凸极性获得转子位置信息,目前常用的注入高频信号主要包括旋转高频电压信号、脉振高频电压信号、载波频率成分分析法等。
在中高速域,IPMSM 可依据反电动势方法衍生出滑膜观测器、扩展卡尔曼滤波器法、参考自适应法等。
尽管现有的混合控制算法通过融合转子位置信息已取得了阶段性成果,但仍面临一些挑战。因此,我们提出了一种基于高频注入与高阶滑膜观测器的永磁同步电机全速域无位置传感器控制策略。通过这一策略,解决了“零低速域平稳启动”及“顺滑过渡到中高速域”的问题,从而有效地提高了电机控制的性能和可靠性。算法结构设计目前已有学者提出了在电机低速运行时采用高频脉振注入法,和中高速运行时采用高阶滑膜观测器法,并基于余弦切换的融合控制算法。但由于余弦函数的固有性质,运行中会引起输出角度的小范围但剧烈的抖动,这种抖动会导致电机在切换过程中产生不平滑的运行和异响。我们提出了一种新型融合策略——利用高阶函数设计一种切换比例系数连续光滑的切换方法。
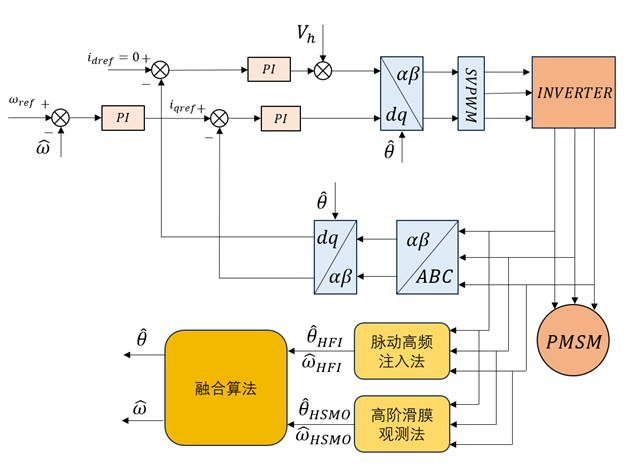
全速域混合观测器结构框图 算法的亮点主要包含以下几个方面:
由于电机在低速域运行时,使用低通滤波器求解转子角度信息会导致相移,并且高频信号的注入会使转子电角频率产生纹波。针对以上问题,我们通过改进脉振高频方波信号的注入方法,向 q ̂ 轴注入高频方波信号,从d ̂ 轴提取转子位置信息与电角频率,并将 q ̂ 轴电流导数计算改为差分信号,从而避免了低通滤波器的使用,增强系统带宽,保证电机在零速工作状态下换向时,观测器处于收敛状态。
利用双二阶广义积分器(DSOGI)系统替代带通滤波器提取高频电压信号,锁定并输出高频阶段电机角频率,提高系统动态性能,防止电机启动时发生抖动。与传统方法相比,系统在调节参数时更加简便。
将脉振高频方波注入法与反电动势模型法相结合,采用以高阶函数为背景的全速域融合策略。在切换观测器时,本算法将转子位置信息与角频率信号使用系数方法进行融合,保证电机在切换阶段顺利过渡,从而实现全速域无位置传感器控制。
仿真模型与结果我们使用 MATLAB/Simulink 搭建三相电机仿真模型,对系统工作原理和控制策略进行了仿真验证。
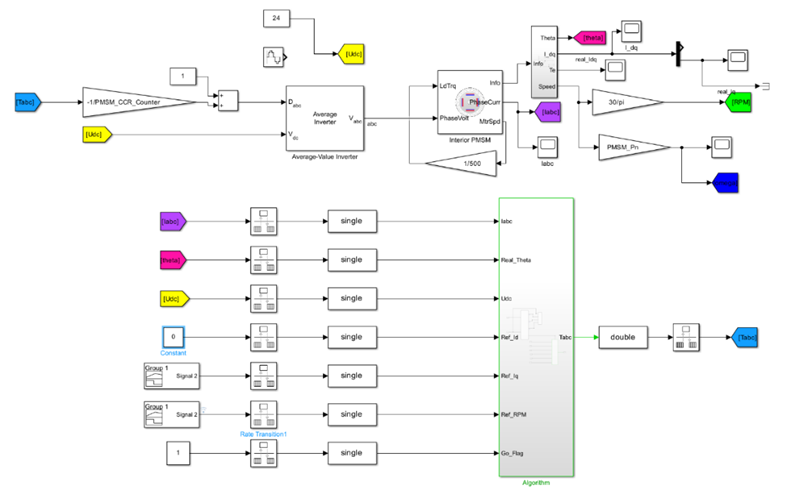
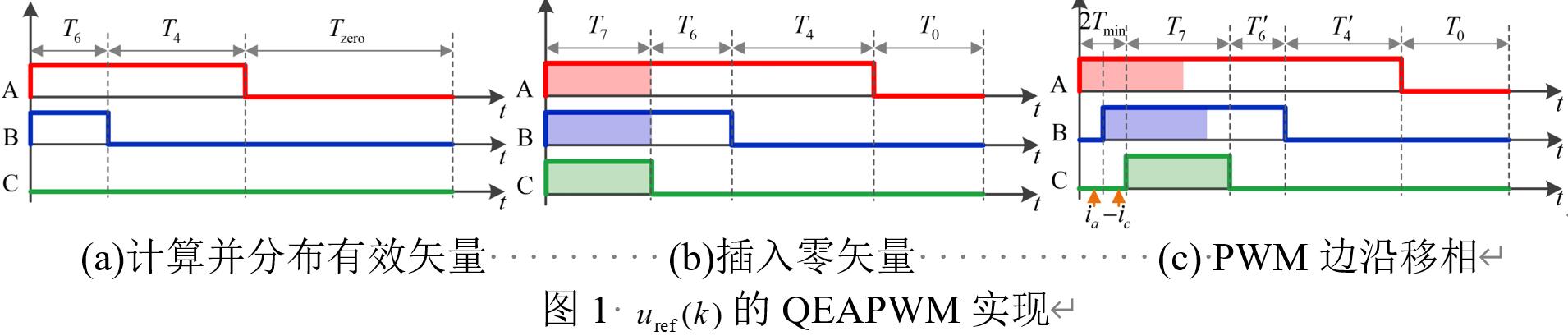
三相电机离散仿真模型 其中绿色边框的算法模块主要包含以下四个部分: 高频注入模块在电机启动至低速时启用,算法使用高频注入观测器产生的角频率作为输入角度,并且角频率经过 DSOGI 模块,能够达到去除大部分纹波的作用。 当达到切换阈值后,算法采用高阶函数进行平滑切换,Park 变换所采取的角度也切换成高阶滑膜算法。 速度环采用 LADRC 控制器,通过使用高频注入方法,观测器很快能够输出观测的转子位置,同时通过PLL锁相环能够输出观测速度。将参考速度与观测速度送入 LADRC 速度控制器,输出参考电流指令。 反 Park 变换和 SVPWM 生成模块:电流环输出的指令送入反 Park 变换模块,计算后的 uα,uβ 传入 SVPWM 生成模块,生成三相驱动信号。在实际代码中将其写入 TIMER0 的 CCR 寄存器。
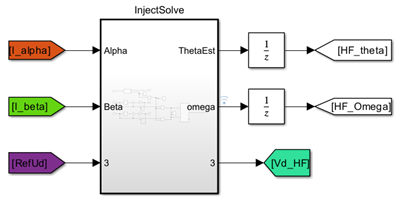
观测器模型(a)高频方波注入模块
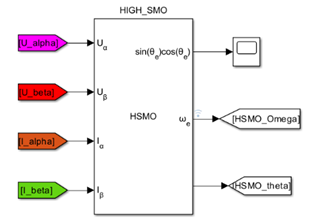
观测器模型(b)高阶滑膜注入模块
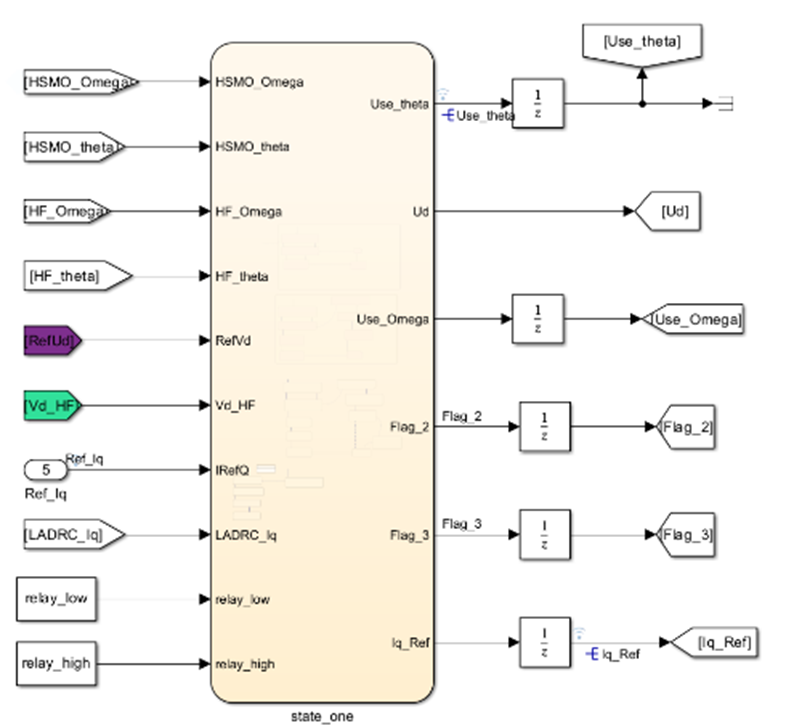
状态机控制模型 在 Simulink 模型中,我们利用 Stateflow 建立了升速与降速的状态机控制模块。每个状态机中包含 4 个状态;箭头表示状态之间的转移;箭头上可以设置一些逻辑判断,用于表示状态之间转移的条件。当转移条件满足时,状态会发生转移,从而使仿真正常运转,从而输出所需的电流、电压、速度与角度等。 要注意的是:无论是输入变量、中间变量还是是输出变量,数据类型和取值范围需要严格把控,以防止出现变量类型不兼容或者变量值溢出等错误。Stateflow 建模使得我们可以清晰地在画布中看到当下算法执行到哪一个状态,这为我们调试程序提供方便。另外,Stateflow 使我们可以保留某个变量在仿真内的最后状态,方便之后的调用。若运行仿真后,转子角度观测准确,电机运行稳定则验证算法收敛,我们可以进行对模型自动生成代码的操作。具体是在算法模块下点击右键,选中“C/C++ 代码->编译此子系统”,等待Simulink 自动生成算法 C 代码。将所生成的 .c 与 .h 文件移植进搭建好的底层代码中进行编译:
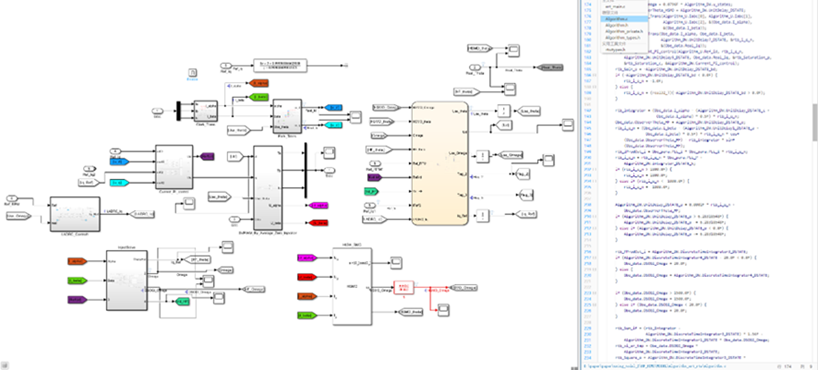
代码生成布局 我们还使用 Simulink 搭建上位机环境。Simulink 的上位机不仅具有简单、高效、波形观察清晰等特点,还使得我们可以将输出数据直接保存为 .mat 格式,方便后续利用 MATLAB 代码进行分析。
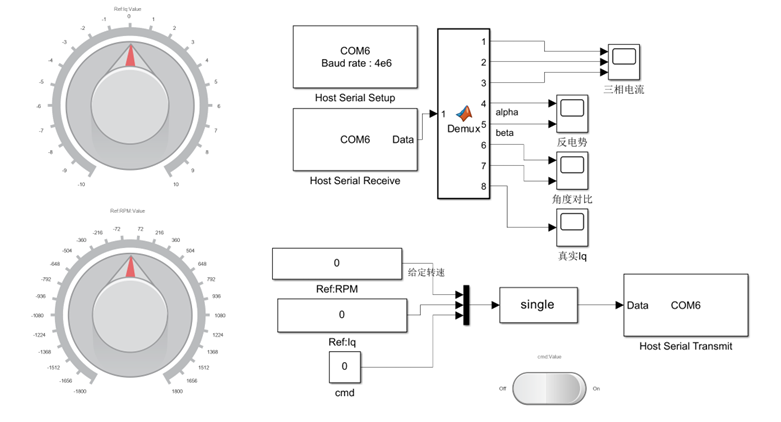
上位机模型 仿真实验的部分结果如下所示。
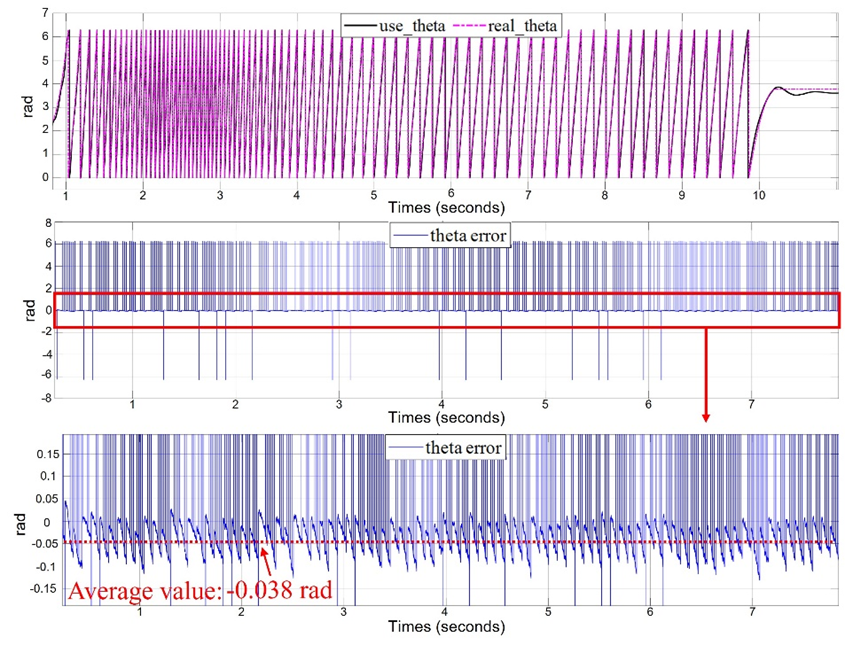
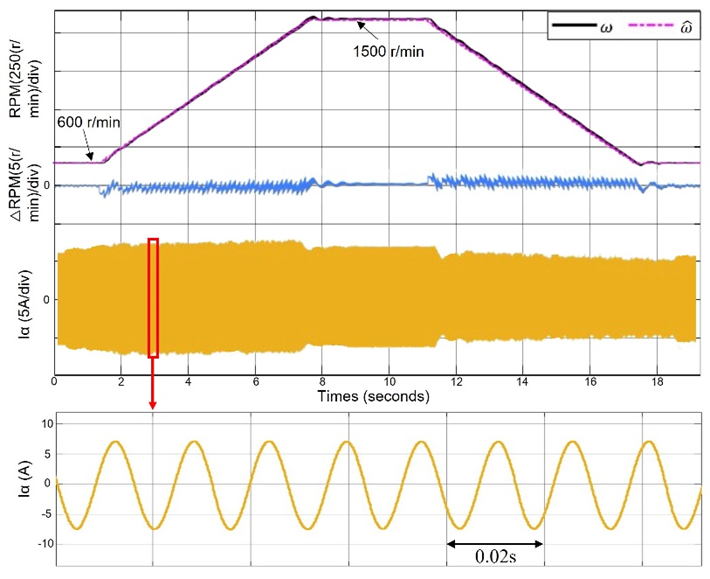
斜坡转速追踪实验(600-1500-600r/min)实验平台与结果完成仿真实验和代码生成之后,我们将代码部署到0.2kW IPMSM矢量控制系统中,对无位置传感器混合算法进行验证,并使用电机对拖的方式进行负载测试。
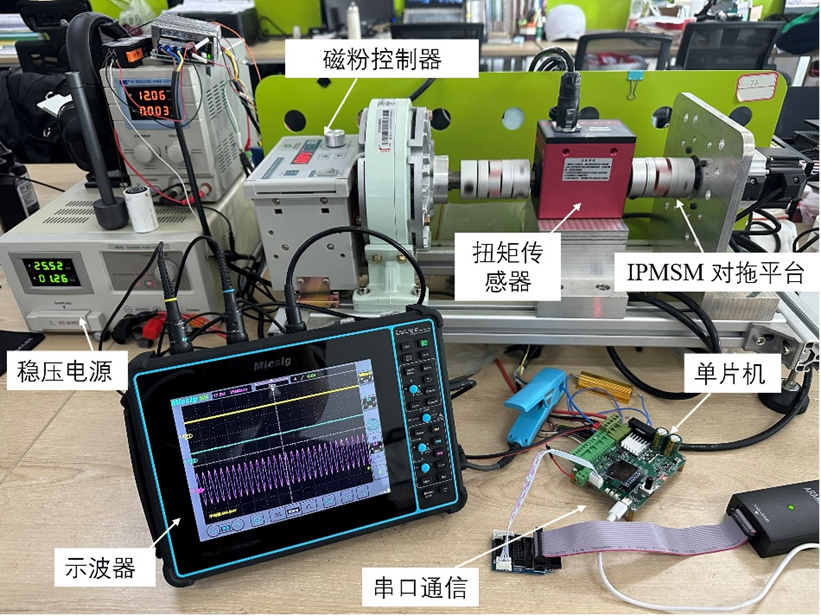
测试台架
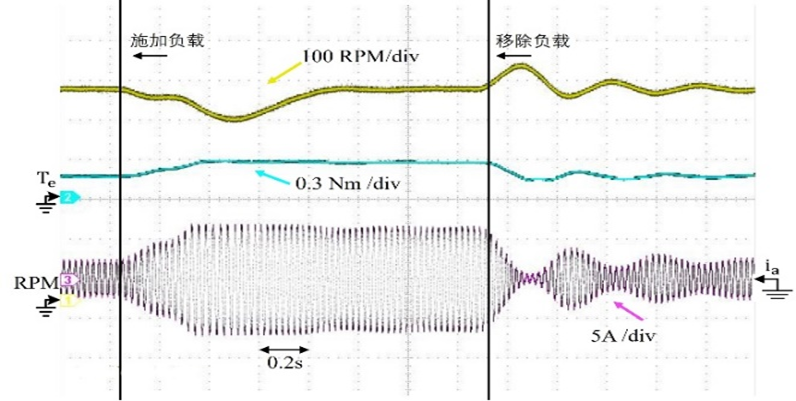
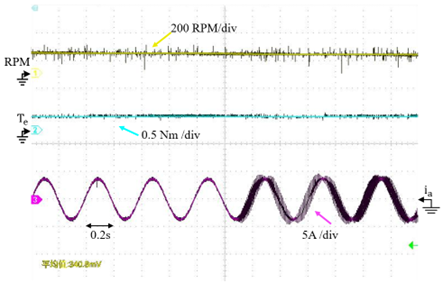
负载扰动实验结果
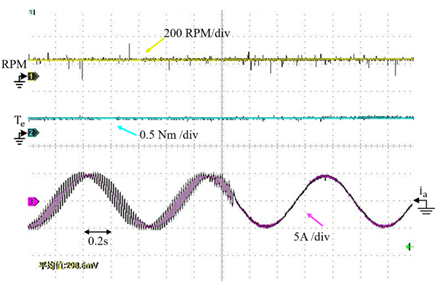
观测器切换实验结果(a)
观测器切换实验结果(b)总结我们在研电赛作品中对传统混合观测器进行改进,设计了一种新型控制策略,为全速域无传感器电机控制提供了新思路,并通过使用 MATLAB 和 Simulink 构建仿真模型、半实物仿真平台和原理样机,验证了所提出的控制策略。使用 MATLAB 和 Simulink,我们可以在不利用硬件电路的情况下,通过仿真实验来验证控制策略;并基于 Simulink 的代码生成功能自动将模型转化成 C/C++ 代码部署到硬件。总之,MATLAB 和 Simulink 有效地帮助我们提高了团队的开发效率,节省了时间和成本!
-
matlab
+关注
关注
185文章
2972浏览量
230370 -
永磁同步电机
+关注
关注
28文章
873浏览量
49528 -
Simulink
+关注
关注
22文章
533浏览量
62372
原文标题:强强对话 | 永磁同步电机全速域无感控制策略
文章出处:【微信号:MATLAB,微信公众号:MATLAB】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基于GD32F407VET6主控芯片的永磁同步电机控制器设计







 工商网监
工商网监
评论