 多传感器融合在自动驾驶中的应用趋势探究
多传感器融合在自动驾驶中的应用趋势探究

自动驾驶技术的快速发展加速交通行业变革,为实现车辆自动驾驶,需要车辆对复杂动态环境做出准确、高效的响应,而多传感器融合技术为提升自动驾驶系统的稳定性和安全性提供了关键支持。通过将不同种类的传感器数据整合分析,多传感器融合不仅能够弥补单一传感器的局限性,还大大提升了感知系统的精确性。
智能驾驶传感器的种类及技术概述
1.1 激光雷达
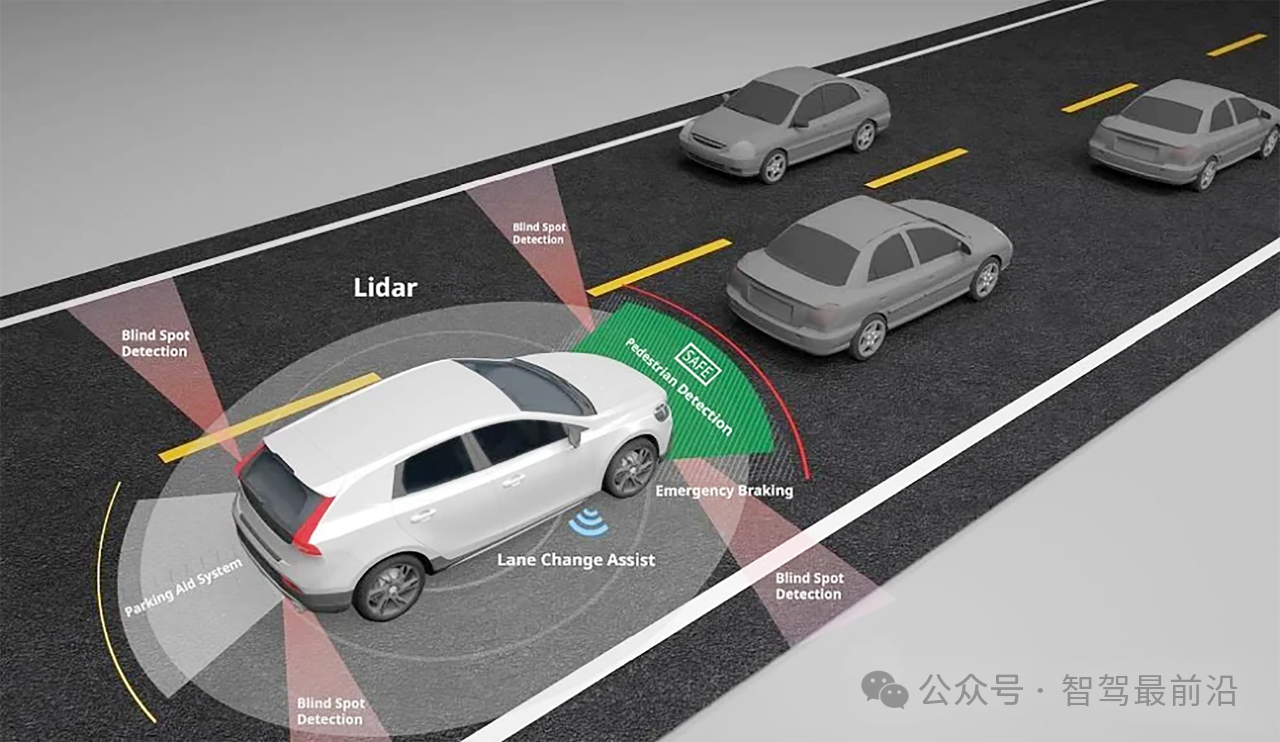
激光雷达(LiDAR)作为自动驾驶技术的核心传感器之一,通过激光束的发射和接收来检测物体的距离、速度和位置等信息。激光雷达发射的激光束遇到物体表面后会反射回传感器,传感器通过记录激光往返的时间来精确计算物体的位置,通常探测范围为150-200米,能够实现高分辨率的空间数据采集。在复杂的城市道路环境中,激光雷达的分辨率远超其他类型传感器,尤其适用于高精度定位和环境感知。因此,激光雷达在L3及更高级别的自动驾驶中被广泛应用,特别是对系统的全天候工作能力要求较高的场景。尽管激光雷达具备较高的测量精度和分辨率,但其高成本和对极端天气的敏感性仍限制了其大规模推广。激光雷达的价格随着量产逐步降低,如速腾聚创等国内激光雷达厂商的产品价格已降至几百美元左右。未来,激光雷达的应用前景将更广泛,特别是在自动驾驶从L2向L3及以上级别发展的过程中,预计将逐渐成为标配传感器。
1.2 毫米波雷达
毫米波雷达通过发射高频电磁波(30-300GHz范围)来探测周围环境中的障碍物,主要用于探测障碍物的距离、速度和方位。毫米波雷达能够穿透雾、雨、雪等复杂天气条件,具备全天候、远距离探测的能力,这使其成为自动驾驶系统中不可或缺的传感器。传统的毫米波雷达虽然在测距和速度检测方面表现出色,但在垂直方向上缺乏分辨能力,对低矮障碍物的识别有所不足。随着自动驾驶需求的升级,4D毫米波雷达通过增加传感器通道数量,增强了对物体高度的探测能力,使其不仅能够识别障碍物的位置和速度,还能实现物体轮廓的精确识别。4D毫米波雷达使毫米波技术更贴合高级别自动驾驶的需求,是未来发展的重要方向之一。根据市场调研,国内4D毫米波成像雷达在2025年有望在前装市场中占据重要地位,且渗透率将进一步提升。
1.3 超声波雷达
超声波雷达利用超声波信号发射和接收的时间差来计算物体的距离,通常用于近距离探测,如泊车辅助和车距监测。由于超声波雷达的探测范围较小(0.1-5米),成本低且结构简单,因此被广泛应用于需要短距离探测的场景。其主要优点在于防水防尘,近距离识别精度高。然而,由于探测距离有限,超声波雷达需要在车身四周布置多个传感器以覆盖盲区,这导致安装复杂。尽管超声波雷达技术相对成熟,但其在恶劣天气下的性能表现不如其他传感器,尤其在大雨或结冰环境中,超声波信号容易受干扰。未来,超声波雷达的市场规模将保持稳定增长,特别是在倒车雷达和自动泊车系统中仍具有不可替代的作用。
1.4 车载摄像头
车载摄像头通过将光信号转化为电信号,生成视频图像,用于识别行人、交通标志、车道线等视觉信息。与其他传感器相比,摄像头具有成本低、技术成熟的优势,广泛应用于L2级别的高级驾驶辅助系统中。摄像头的探测范围通常在6-100米之间,适合识别动态或静态物体的形状和颜色信息,并能够判断物体的大小和距离,尤其适用于复杂道路环境下的障碍物检测。摄像头虽具备多功能性,但在夜间、雾霾等低能见度条件下性能大打折扣,且测速、测距能力依赖算法支持。未来,车载摄像头将与其他传感器融合使用,以提高整体感知精度和环境适应性。全球车载摄像头市场也将进一步扩展,特别是在ADAS(高级辅助驾驶系统)功能的普及带动下,车载摄像头需求量将持续增加。

车载感知硬件对比
多传感器融合技术在自动驾驶中的应用
2.1 多传感器融合的必要性
自动驾驶系统在实现自主行驶的过程中,需要全面了解车辆周围的环境信息。然而,由于单一传感器的技术局限性,很难全面准确地获取完整的环境信息。例如,车载摄像头在遇到光照过强或能见度较低的场景时表现不佳,而激光雷达在雨雪等恶劣天气中同样存在检测困难。毫米波雷达虽然具备抗干扰能力,但在分辨率上难以满足高精度感知需求。因此,为了提升自动驾驶系统的安全性和可靠性,多传感器融合应运而生,将不同传感器的数据进行综合分析,有效弥补了单一传感器的不足。
2.2 多传感器融合的技术实现
多传感器融合在技术实现上通常分为三种方式:数据层融合、特征层融合和决策层融合。
• 数据层融合:在数据层融合中,各种传感器的原始数据在低级别进行融合,通过数据处理技术获得环境的全面信息。这种融合方式处理的数据量较大,但可以提供更高的准确度。数据层融合的一个典型应用场景是实时环境建模,通过摄像头和激光雷达的融合创建车辆周围的三维模型。• 特征层融合:在特征层融合中,系统会先对传感器数据进行特征提取,随后再对特征信息进行整合分析。特征层融合通常用于较为复杂的自动驾驶系统中,因其能够减少冗余数据,并提高处理效率。例如,摄像头和毫米波雷达可以分别提供物体的形状和速度特征,二者融合后的特征信息可以生成更为准确的物体轮廓。• 决策层融合:决策层融合通过对不同传感器的识别结果进行决策整合,这种融合方式具有高度的抽象性和智能化。决策层融合不仅能够有效应对传感器数据冲突,还能够基于多重信息进行风险评估,提高系统的综合响应能力。决策层融合常应用于紧急刹车和避障等高风险场景。
2.3 典型的传感器组合应用
在自动驾驶的应用实践中,不同传感器组合可以实现多样化的感知任务。例如,在L2级别的高级驾驶辅助系统中,通常采用摄像头、毫米波雷达和超声波雷达的组合,以满足基础的环境识别和车辆控制需求。而在L3及以上级别的自动驾驶中,激光雷达、摄像头和毫米波雷达的组合更为常见,这种组合使系统不仅具备了高精度的物体检测能力,还能够提供更好的感知冗余性,提高整体的系统可靠性。激光雷达和摄像头的融合使用尤其关键,前者可提供精确的三维数据,而后者擅长颜色和形状识别,二者的结合大幅提升了系统对行人、车辆等目标的识别准确度。此外,毫米波雷达在恶劣天气下的稳定性可以弥补激光雷达和摄像头的缺陷,使整个系统更具适应性。在未来的发展中,随着传感器的性能不断提升,多传感器融合方案的应用场景将进一步扩展,自动驾驶技术的可靠性也将显著提高。
激光雷达市场分析及前景展望
3.1 激光雷达市场规模及发展趋势
激光雷达市场的快速增长反映了自动驾驶行业对高精度环境感知的迫切需求。作为目前实现高精度测量的核心传感器之一,激光雷达在自动驾驶中的作用日益重要,特别是在L3及以上级别的自动驾驶车辆中,激光雷达几乎被视为标配。根据速腾聚创发布的行业数据,2022年全球激光雷达市场规模已达120亿元人民币,预计到2030年将增长到1.25万亿元,复合年增长率将达到78.8%。激光雷达市场的增长不仅局限于车载应用,还包括智能城市、V2X、机器人等领域,这为激光雷达市场的多元化发展提供了机会。
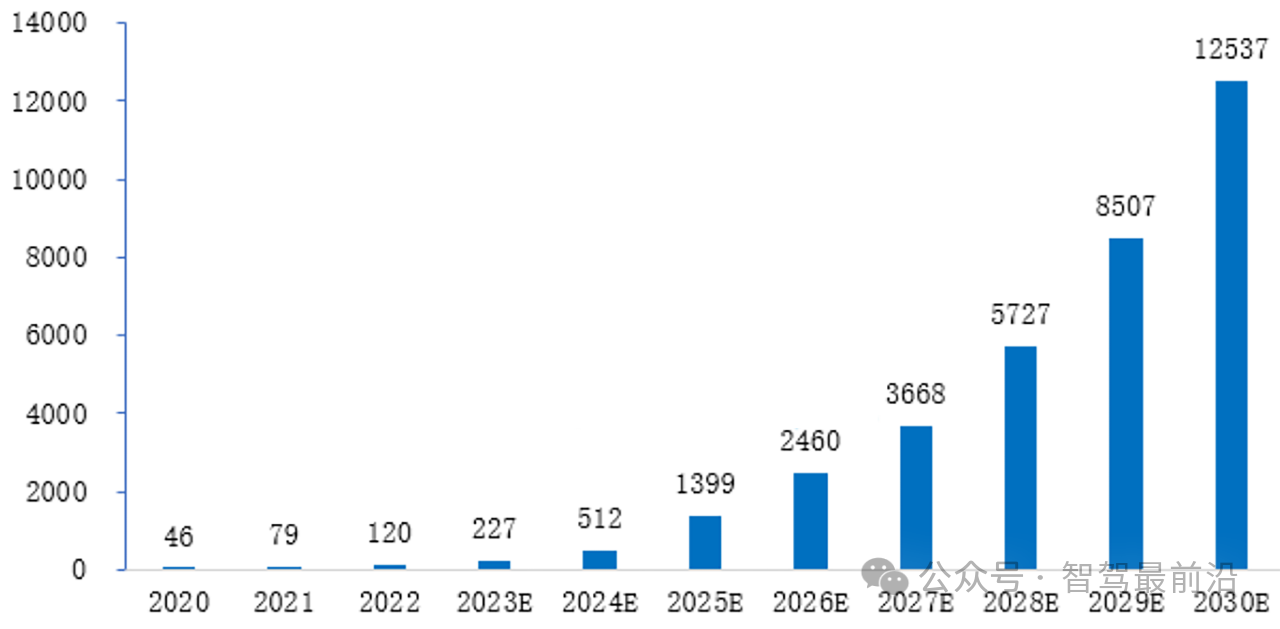
2020-2030 年全球激光雷达解决方案市场规模(亿元)
目前,全球激光雷达市场由硬件和解决方案组成,其中硬件占据了市场大部分份额。国内激光雷达的生产和技术在过去几年中也取得了显著进展,尤其是在量产爆发的推动下,国产激光雷达的市场份额逐渐超越国外品牌。国产品牌如禾赛科技、速腾聚创等不仅在国内市场占据优势,甚至在国际市场上与法雷奥等国外品牌展开激烈竞争,国产激光雷达未来在全球市场中有望继续扩大份额。
3.2 激光雷达市场的竞争格局
激光雷达市场的竞争格局逐渐呈现出三大梯队分布。第一梯队由禾赛科技、速腾聚创、图达通等国内企业组成。这些企业凭借自主研发的核心技术和规模化量产能力在国内外市场中占据领先地位。禾赛科技凭借较高的市场份额连续多年位居全球激光雷达销售榜首,增速显著。图达通则依靠与蔚来汽车的紧密合作,实现了较大的市场覆盖率。第二梯队主要包括沃览科技、探维科技和华为等,这些企业在产品创新和定点量产上不断努力,以进一步缩小与第一梯队的差距。第三梯队则是众多初创公司,它们通过研发和探索新的技术路径希望在激光雷达市场中找到自己的定位。在全球范围内,激光雷达产业链上游的核心技术和供应商主要来自欧美和日本。国际领先的激光雷达供应商包括法国的法雷奥(Valeo)、美国的Ouster、Cepton等,这些企业在激光器、探测器、激光驱动芯片等核心组件上具有领先的技术优势。然而,国内企业在近年取得了显著的市场份额,通过大规模量产逐步降低成本,并通过持续的技术研发逐步缩小与国际领先厂商的差距。预计未来,国内激光雷达市场的竞争将更加激烈,特别是在L3及以上自动驾驶应用场景中,各大厂商将争相推出高性价比的产品以占据更大的市场份额。
3.3 激光雷达未来的发展方向
激光雷达的未来发展方向主要体现在成本降低、小型化设计、全天候适应能力和算法优化等方面。随着自动驾驶等级的不断提升,市场对激光雷达的需求量也在不断增长。特别是在L3和L4级别的自动驾驶车辆中,激光雷达的搭载数量预计将继续增加。在目前L3级别的自动驾驶中,通常需要1至2颗激光雷达,而L4和L5级别的车辆可能需要4至6颗激光雷达。为了满足更高的需求,企业在持续推动技术创新的同时,也在通过量产和成本控制来加速产品普及。此外,未来的激光雷达将逐步适应极端天气和全天候工作的需求。传统激光雷达在大雨、大雾等天气条件下性能受限,影响了自动驾驶车辆的整体安全性。针对这一问题,国内外多家厂商正在加大对抗恶劣环境技术的研发,以提升激光雷达在各种天气条件下的可靠性。同时,随着5G和AI技术的不断进步,激光雷达算法的实时性和处理效率将进一步提升,这将推动激光雷达从“高精度传感器”向“智能传感器”转型,从而更好地满足自动驾驶系统的需求。
毫米波雷达及超声波雷达的市场发展
4.1 毫米波雷达市场规模及前景
毫米波雷达市场在自动驾驶的发展中扮演了重要角色,特别是在智能驾驶的基础级应用中(如L2级别的自动驾驶),毫米波雷达已成为车载传感器的标配。毫米波雷达主要依赖电磁波进行探测,能够应对低光照、强降水等复杂天气条件,因此其适用范围广泛。随着技术的进步,4D毫米波成像雷达逐步兴起,传统毫米波雷达无法感知物体高度,而4D毫米波雷达则具备更为先进的空间感知能力。根据高工智能汽车研究院的报告,2025年4D毫米波成像雷达的前装搭载率将超过40%,市场规模有望达到384亿元人民币,复合年增长率为25.5%。在毫米波雷达的市场格局中,德国博世、大陆集团等国际厂商占据了领先地位,控制了全球大部分的3D毫米波雷达市场。然而,随着4D毫米波成像雷达的应用兴起,国内厂商得以切入该领域并取得快速发展。特别是华为、德赛西威等企业在4D毫米波雷达技术上取得突破性进展,这些厂商正积极拓展毫米波雷达的前装应用市场。在市场需求和政策支持的推动下,未来毫米波雷达的市场前景广阔,预计其在智能驾驶中的应用将进一步普及。
4.2 超声波雷达的市场地位
超声波雷达作为自动驾驶中的基础传感器,已在倒车辅助、自动泊车等应用中实现了大规模的装车普及。与激光雷达和毫米波雷达相比,超声波雷达具有较低的技术门槛和成本优势,主要用于近距离探测。根据P&S Intelligence的统计,全球超声波雷达市场在2019年的规模约为34.60亿美元,预计到2030年将达到61亿美元,年复合增长率为5.1%。超声波雷达市场的增长速度虽不如激光雷达和毫米波雷达显著,但由于其在短距离探测方面具备独特的优势,预计未来在自动泊车等应用场景中的需求将保持稳定增长成熟,但其性能也存在一定的局限性。超声波雷达的探测范围较小,通常为0.1至5米,仅适合近距离检测;此外,超声波雷达对恶劣天气的适应性不佳,容易受雨水或低温环境影响。因此,超声波雷达通常被用于辅助功能,而非自动驾驶系统的核心传感器。尽管如此,超声波雷达凭借其高性价比仍是自动驾驶系统中不可或缺的组成部分,特别是在自动泊车和低速环境感知方面,超声波雷达具备良好的市场竞争力。未来,超声波雷达市场的发展将以降低成本和优化集成度为主要方向。随着自动驾驶逐步普及,车辆在倒车辅助、自动泊车等低速场景中对超声波雷达的需求将进一步增加。特别是在高级别自动驾驶中,车辆需要在狭小的空间内进行准确定位和移动,而超声波雷达的精确度和经济性使其在这些场景中依然具有优势。
多传感器融合技术的挑战与未来趋势
5.1 多传感器融合的技术挑战
尽管多传感器融合为自动驾驶系统提供了更为精准和可靠的感知能力,但在实际应用中,仍然面临许多技术挑战。首先是成本问题。当前激光雷达和毫米波雷达等高精度传感器的价格依然偏高,特别是在中低端市场中,高昂的硬件成本阻碍了其大规模应用。其次是数据处理能力的限制。多传感器融合需要同时处理来自不同传感器的数据,这对处理器的计算能力和算法的实时性提出了更高要求。特别是在高精度、低延迟的应用场景下,现有的芯片和算法尚未完全达到自动驾驶的需求。环境适应性问题也是多传感器融合面临的主要挑战之一。不同传感器在面对极端天气或复杂环境时的表现存在差异,例如,摄像头在强光或低光条件下表现不佳,而激光雷达在大雨或大雾中受限明显。因此,多传感器融合需要更加智能的算法来协调传感器之间的冲突和冗余信息。此外,自动驾驶系统的响应时间和安全性也受到多传感器融合精确度和可靠性的影响,这要求更高效的传感器管理和数据处理策略。
5.2 多传感器融合的未来趋势
随着自动驾驶技术的逐步成熟,多传感器融合将朝着高精度、低成本、实时响应的方向发展。首先,传感器成本的降低将推动多传感器融合的广泛应用。未来,激光雷达、毫米波雷达等高精度传感器的成本有望持续下降,特别是随着规模化量产和国产替代的推进,市场上可用的经济型传感器将会增加,这将显著降低自动驾驶系统的整体成本,使多传感器融合在中低端车型中也能得到推广应用。智能化融合算法将成为多传感器融合发展的重点。随着人工智能和机器学习算法的不断发展,自动驾驶系统可以更高效地分析和处理传感器数据。基于AI的融合算法不仅能够实时优化传感器数据的权重分配,还能够在面对异常数据时进行智能修正,以提高系统的可靠性。例如,通过深度学习算法,自动驾驶系统可以在摄像头、激光雷达和毫米波雷达的不同数据源之间进行最优选择,从而提升系统的整体感知能力和决策能力。传感器模块化的发展趋势将进一步推动多传感器融合技术的进步。未来传感器的设计将更具模块化,以便根据车辆不同的自动驾驶等级和使用场景灵活配置。对于L3及以下级别的自动驾驶,可能仅需要摄像头和毫米波雷达的组合;而对于L4及L5级别的自动驾驶,则可能会增加激光雷达和多目摄像头的组合。模块化设计不仅可以降低成本,还能够提高系统的可扩展性,为多传感器融合在不同级别自动驾驶中的应用提供更高的灵活性。
总结
多传感器融合技术已成为推动自动驾驶发展的核心因素。通过结合激光雷达、毫米波雷达、超声波雷达和摄像头的优势,多传感器融合可以弥补单一传感器在精度、可靠性和适应性方面的不足,使自动驾驶系统能够在复杂环境下实现更高的安全性。激光雷达在自动驾驶中的应用前景广阔,其市场规模预计将持续增长,特别是在L3及以上级别的应用中,激光雷达的普及将成为重要趋势。虽如此,多传感器融合技术的应用仍面临多重挑战,如传感器成本、算法性能和环境适应性等问题。为解决这些问题,未来需要通过技术创新、算法优化和产业链整合来不断提高多传感器融合的成熟度。特别是在成本降低、智能算法和模块化设计等方面的进展,将进一步推动多传感器融合技术的应用普及。可以预见,随着多传感器融合技术的进一步发展,自动驾驶的安全性、可靠性和普及度将显著提升,为实现更高等级的自动驾驶奠定坚实基础。
审核编辑 黄宇
-
传感器
+关注
关注
2578文章
55581浏览量
794333 -
智能驾驶
+关注
关注
5文章
3056浏览量
51387 -
多传感器融合
+关注
关注
0文章
5浏览量
7185 -
自动驾驶
+关注
关注
795文章
15015浏览量
181734
发布评论请先 登录
自动驾驶多传感器前融合,到底提前融合了什么?

智驾之“眼”的血管革命:自动驾驶传感器融合趋势下,多频段射频连接器集成方案深度全景解析

如何设计自动驾驶传感器失效检测与容错策略?
基于PTP,如何做好多传感器微秒级时间同步?

自动驾驶 ADAS 传感器车规电容:低 ESR + 抗电磁干扰选型指南
自动驾驶BEV Camera数据采集:时间同步技术解析与康谋解决方案

L4级自动驾驶数据采集系统首选
超声波传感器线圈:自动驾驶实现精确实时近距离感知的关键
如何处理自动驾驶感知传感器脏污问题?

激光雷达传感器在自动驾驶中的作用
太阳光模拟器 | 在汽车自动驾驶开发中的应用

康谋分享 | 基于多传感器数据的自动驾驶仿真确定性验证

自动驾驶汽车如何正确进行道路识别?

自动驾驶汽车是如何准确定位的?




评论