 4D-bev在自动驾驶中的落地应用
4D-bev在自动驾驶中的落地应用

4D-BEV标注是指在3D空间中以时间作为第四个维度进行标注的过程。BEV(Bird's Eye View)即鸟瞰视角,实现方法是将原本摄像头2D的视角通过算法校正和改变,形成基于上帝视角的俯视图。这种技术通过精准地跟踪和记录动态对象(如车辆、行人)的运动轨迹、姿势变化以及速度等信息,全面理解和分析动态对象在连续的时间序列中的变化。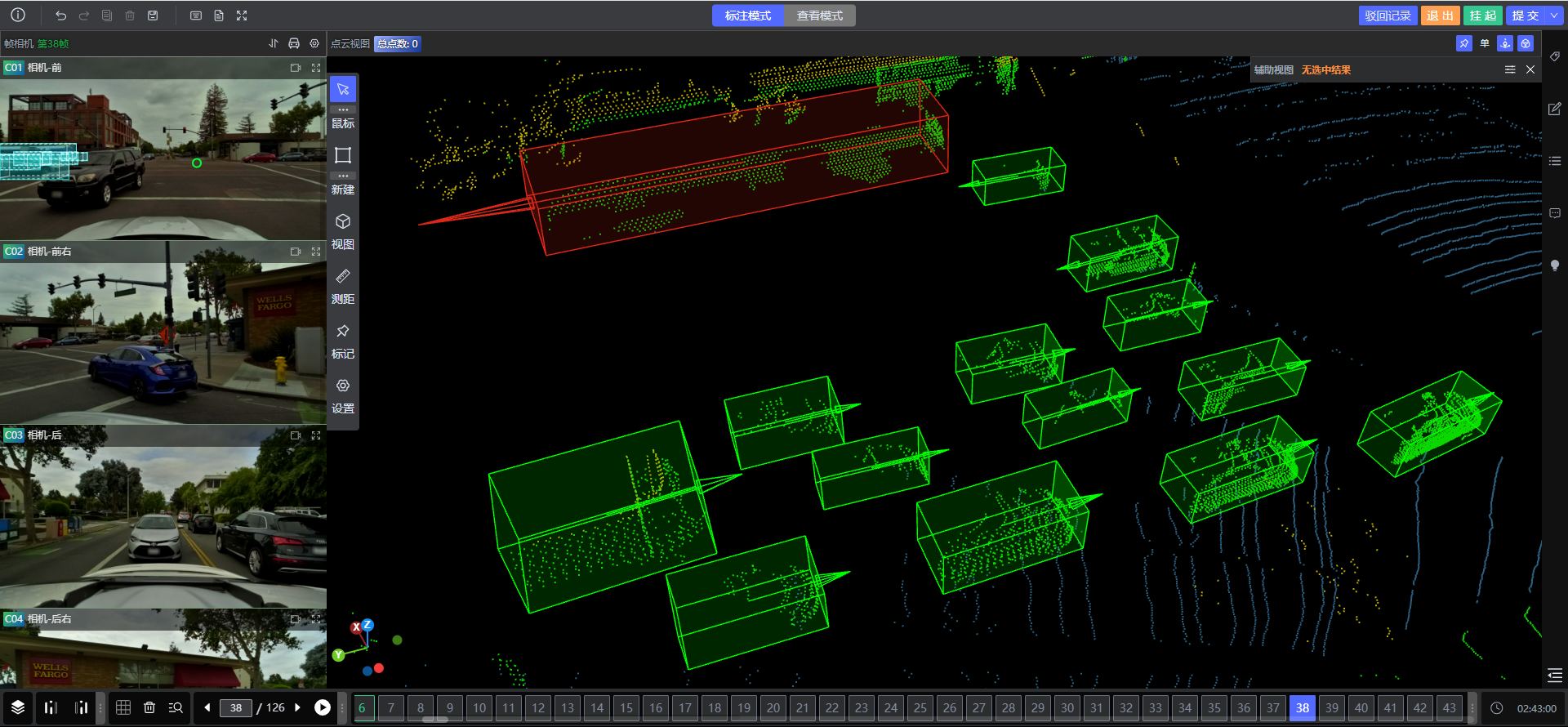
4D-BEV感知算法的输入为具有时序的视频数据,输出为时序信息,例如跟踪、预测、速度、加速度等,其训练数据不仅依赖于3D位姿标注数据,还需要包含时序信息。因此,4D标注不仅需要标注3D空间中的静态目标,还需要标注具有时序信息的动态目标,它是一项为输出3D空间中具有时序信息的任务提供真值的技术。
4D标注在驾驶中的应用
4D标注在自动驾驶中发挥着至关重要的作用。它不仅提供了动态物体的精确信息,还支持感知任务的训练和评测,构建仿真场景库,实现数据闭环,并支持自动驾驶系统的测试和优化。具体如下:
一、提供动态物体的精确信息
记录运动轨迹:4D标注能够准确记录物体在时间轴上的运动和变化,捕捉物体在不同时间点的状态,从而生成完整的运动轨迹。
捕捉形态变化:除了物体的位置信息外,4D标注还能捕捉物体的形态变化,如大小、形状等随时间的变化情况。
二、支持感知任务的训练和评测
真值数据生成:4D标注为自动驾驶的感知任务(如分割、freespace、库位检测和3D跟踪等)提供训练和评测的真值数据。这些数据是算法模型训练和优化的基础。
提升感知性能:通过4D标注生成的真值数据,可以训练出更准确的感知模型,从而提高自动驾驶系统对周围环境的感知能力。
三、构建仿真场景库
静态和动态目标重建:4D标注过程中,可以对场景中的静态和动态目标进行重建,以构建仿真场景库。
合成新场景:根据某些规则,可以将新的车辆加入已有的背景环境中,生成新的真值数据,并进行仿真测试。这种方式可以模拟各种复杂的交通场景,为自动驾驶系统的测试和优化提供有力支持。
四、实现数据闭环
关键模块:4D标注是自动驾驶数据闭环中的关键模块之一。它连接了终端和云端,实现了数据的采集、处理、标注和反馈。
优化算法模型:通过4D标注生成的真值数据,可以对自动驾驶系统的算法模型进行持续优化和改进,提高系统的整体性能。
五、支持自动驾驶测试
单环节测试:4D标注可以为自动驾驶系统中的感知、定位、决策规划和控制等算法模块提供真值数据,从而支持对这些模块进行单独的测试。
端到端测试:由于4D标注提供了完整的场景信息,因此也可以支持自动驾驶系统的端到端测试,即模拟从感知到控制的全过程测试。
4D-BEV(四维鸟瞰视图)在自动驾驶中的使用具有以下优势:
全局感知能力:4D-BEV视角能够提供360度的全方位视野,并且可以表示场景中物体的高度和立体空间信息。这种视角使得车辆能够在复杂环境中精确感知场景,解决了传统视角在感知上的局限性。
传感器数据融合:在4D-BEV空间中,不同传感器(如摄像头、激光雷达、毫米波雷达)的数据可以在同一坐标系下进行对齐和融合,减少了信息丢失,提高了感知的准确性和可靠性。
前融合的优势:4D-BEV支持前融合技术,即直接在BEV空间中进行多传感器数据的融合,而不是在各自传感器中分别处理后再进行融合。这种方法减少了信息丢失,提高了目标识别的准确率,并且简化了多摄像头之间的目标确认过程。
高精度和高感知距离:4D-BEV标注技术提供了高精度的目标检测和占用检测,能够实现500米(前后)、200米(左右)的综合真值感知,这对于自动驾驶车辆在复杂城市环境中的安全行驶至关重要。
4D标注未来面临挑战
当下4D BEV 感知的挑战主要有两个:
1.数据获取与标注成本高:获取高质量的4D BEV真值数据并进行标注是一项昂贵和耗时的任务。为了解决这个问题,标贝科技推出了基于大模型自动化能力的4D-BEV标注工具,支持处理上亿像素点云数量,提高标注效率和准确度。
2.算法复杂度大:4D BEV感知需要处理的数据维度更高,算法复杂度更大,对计算资源的要求也更高。这要求标注工具具备强大的计算能力和优化算法,以应对复杂的数据处理需求。
3.实时性要求高:自动驾驶系统需要实时感知周围环境,这对4D BEV感知的算法提出了很高的实时性要求。因此,标注工具需要支持快速的数据处理和标注,以满足自动驾驶系统的实时性需求。
为了解决这些行业痛点,标贝科技4D标注工具针对3D空间+时序维度进行标注,采用了多种传感器融合的方式,可以支持激光雷达、摄像头、毫米波雷达、机位图等多种数据类型,并通过算法将这些数据进行对齐和融合,以提供更准确、更统一的视图。同时借助自动化技术和云端大数据来提升标注的效率和准确度。
基于自身丰富的3D点云项目标注经验和先进的数据标注工具,标贝科技可以根据客户需求提供相应的数据标注服务,有力突破数据与应用场景之间的边界,支持全面质检、验收和管理,开放甲方验收通道,标注结果支持多种格式在线导出,校对数据,基本实现标注精确率达99%,完成高标注、高质量、快速交付。
审核编辑 黄宇
-
仿真
+关注
关注
55文章
4536浏览量
138672 -
自动驾驶
+关注
关注
794文章
14990浏览量
181559
发布评论请先 登录
4D毫米波雷达成为L3级自动驾驶的感知基石
德州仪器这些技术推动自动驾驶迈向新高度

自动驾驶BEV Camera数据采集系统:高精度时间同步解决方案

自动驾驶BEV Camera数据采集:时间同步技术解析与康谋解决方案


自动驾驶中4D毫米波雷达在雨雾中更具优势吗?

恩智浦4D成像雷达如何助力自动驾驶发展
中车电动助力成都自动驾驶公交示范线开跑
生成式 AI 重塑自动驾驶仿真:4D 场景生成技术的突破与实践

低速自动驾驶与乘用车自动驾驶在技术要求上有何不同?

卡车、矿车的自动驾驶和乘用车的自动驾驶在技术要求上有何不同?

浅析4D-bev标注技术在自动驾驶领域的重要性
自动驾驶技术落地前为什么要先测试?
标贝科技“4D-BEV上亿点云标注系统”入选国家数据局首批数据标注优秀案例



评论