 正运动荣获红帆奖、深圳市电子装备工业劳动模范奖章!
正运动荣获红帆奖、深圳市电子装备工业劳动模范奖章!

直击现场
2024年12月10日,由深圳市电子装备产业协会与深圳市智能装备产业协会携手主办的【2024深圳智造大会暨第十届“红帆奖”&第六届“深圳市电子装备工业劳动奖章”颁奖盛典】,在深圳国际会展中心红树林厅隆重举行。
正运动公司受邀参与此次盛会,与众多优秀的深圳智能装备企业代表齐聚一堂,共同见证这一智造业的年度庆典。
红帆奖


正运动技术在本年度装备制造业红帆奖评选活动中,凭借在运动控制领域的持续深耕和显著的创新成果,成功荣获“红帆奖”殊荣。
正运动实现了智能制造核心运动控制产品和软件平台的优化升级,提升了控制系统的高速高精控制、跨平台部署、兼容性、稳定性和易用性,并在产品核心器件国产化方面取得重大突破,实现自主可控。
开发了全国产EtherCAT运动控制器、高性能x86架构Windows实时机器视觉运动控制一体机、超高速PCIe实时运动控制卡等产品,推出了多个符合行业实际应用标准和市场需求的运动控制解决方案,赢得了市场的广泛认可。
经过专家团队的严格评审,正运动从众多竞争者中脱颖而出,肯定了其在运动控制领域全国产化先行者的地位,充分彰显了正运动在智能制造自主自研道路上迈出了坚实步伐。
深圳市电子装备工业劳动奖章



“深圳市电子装备产业工业劳动奖章”旨在表彰和宣传深圳电子装备及智能装备产业的劳动模范,弘扬装备人的创新实干精神。
我司赵建厂先生(深圳市正运动技术有限公司总经理)经评价委员会评定,获得第六届工业劳动模范荣誉。赵建厂先生2006年进入自动化行业,作为运控行业老兵,与正运动技术创始人郑孝洋先生共事多年,双方在使命愿景和经营理念上高度契合,彼此信任,共同致力于做更好用的运动控制,努力缩小国产运动控制与世界领先的差距。
赵建厂先生始终着眼于推动自动化产业进步,大部分精力投放在市场一线,以创造价值为标尺,倾听市场和客户心声,聚焦应用和工艺痛点,与郑孝洋先生紧密配合,秉持长期主义和工匠精神,努力打造纯国产运动控制实时内核及相应生态,助力自动化应用水平提升,持续为客户创造差异化价值。
再次祝贺赵建厂先生,期待赵建厂先生在正运动技术的创新性与可持续发展注入新的动力。
特别合作机构

荣获由深圳市电子装备产业协会、深圳市智能装备产业协会共同授予的“特别合作机构”荣誉牌匾。
体现了协会对正运动在国产运动控制领域自主可控的持续努力的高度认可,也标志着正运动在深耕电子智能装备产业价值链合作、推动技术交流和资源共享方面迈出关键一步。
正运动愿景
未来,正运动技术将始终秉持提升国产运动控制技术和产品的初心,不断克服软硬件技术的瓶颈,矢志于打造自主可控、简单易用、功能强大的运动控制技术,致力于为客户提供更好用的运动控制产品和生态。
切实帮助客户与合作伙伴,合作企业解决卡脖子问题,不断加大技术研发的投入,攻克行业的关键技术难题,积极洞察并把握市场动态,快速响应客户需求,为客户提供更优质的产品和服务,助力智能装备迈向更快更准更智能。
高速高精运动控制产品

01 产品概述
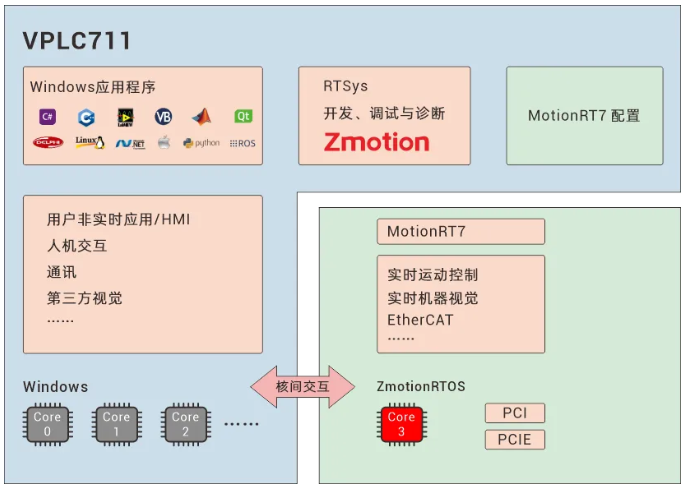
基于x86架构的EtherCAT总线视觉运动控制器,跨平台部署,支持脱机运行,内置丰富的视觉和运动控制功能,大幅简化配置流程。核内数据交互速度快,显著降低时间和成本投入,提高项目实施效率。
安装与拆卸过程便捷,占地空间小,能与其他控制单元部件(如伺服驱动器、传感器等)和MES系统无缝集成。提供一体化开放式IPC形态的实时软控制器/软PLC集成的机器视觉+运动控制解决方案。
面向高速高精、专机系统及中大型产线设备的视觉运动控制解决方案!
02 产品特性
可选6-64轴运动控制(脉冲+EtherCAT总线),EtherCAT周期最快可达250us;
支持多种通讯接口,方便客户集成现有系统中;
搭载MotionRT7,内核交互,指令调用快至us级,支持第三方视觉软件;
多核并行运算,能够高效处理运动控制,机器视觉等自动化设备核心任务;
板载20路通用输入(其中10路为高速输入),20路高速输出;
支持EtherCAT冗余功能,解决单点故障停机,自动诊断并持续运行,增强系统可靠性,简化维护工作。
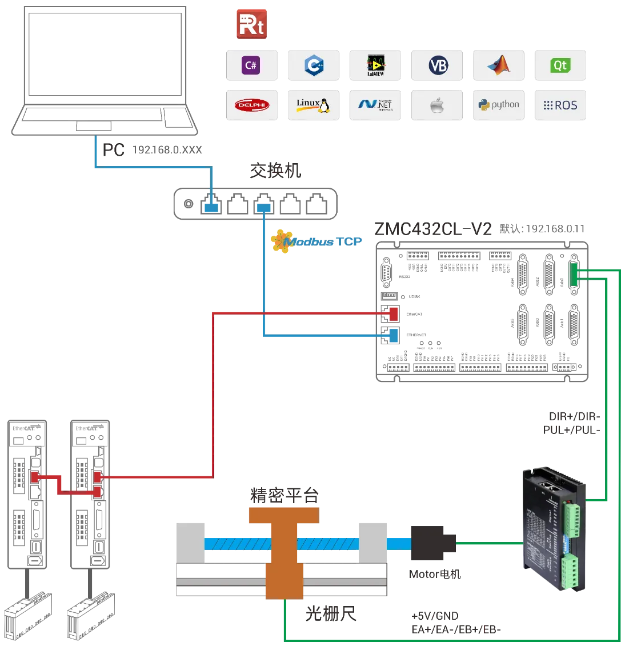
ZMC432CL-V2 脉冲全闭环的32轴总线型运动控制器
01 产品介绍
ZMC432CL-V2是一款高性能运动控制器,具备高速实时反馈功能,支持脉冲全闭环控制,能够实现高精度、高响应速度的运动控制。高精度定位,有效消除机械传动误差,满足高精密加工场景应用要求。
02 主要特点
(1)使用现成的API开发各种装备

(2)步进电机的外置光栅尺全闭环解决方案
ZMC4系列高效的网口读写,PCIe/PCI系列卡可共享内存接口(共享内存的批量读写3-5us);
内置反向间隙补偿,双向螺距补偿,2D平面补偿等;
可以同时支持脉冲轴和EtherCAT轴运动混合使用;
ZMC432CL-V2可支持步进电机的外置光栅尺全闭环解决方案。
高速高精“PC-based运动控制卡”系列家族
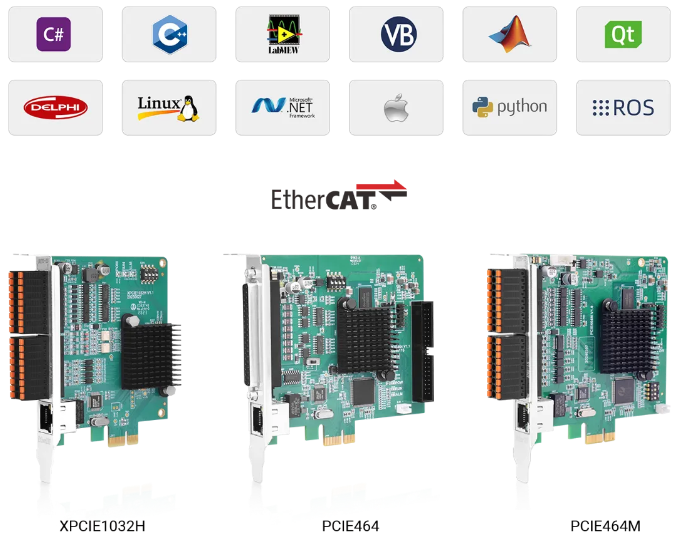
01 产品概述
在“PC+运动控制卡”架构中,实现精准的多轴同步控制与高速点位运动控制,支持灵活定制轴数和功能以满足不同客户需求。支持位置锁存、高速位置比较输出(PSO)、同步跟随、全系插补等功能,并支持多种上位机编程语言,便于用户二次开发。
采用PCIe和EtherCAT总线接口设计,确保半导体封装&测试设备实现高速高精运动控制。通过短周期、高协同性,确保设备运动平稳加工,消除抖动。
广泛应用于高速固晶机、半导体测试分选机、引线键合、PCB曝光机UVW运动控制、晶圆传输机械手等半导体封装&测试设备应用场景中。
02 产品特性
PT/PVT运动,灵活处理运动轨迹和速度的规划;
更安全机制,掉电中断、掉电保存,PC宕机也能正常运行;
SS曲线速度与加速度平滑,解决高速往复运动中的抖动问题;
超高速实时性,可内置RTBasic脚本程序,实现us级的高速响应;
1D/2D/3D硬件位置比较速度PSO,视觉飞拍、精密点胶、激光加工等应用;
在线变速/位置、速度、力矩模式在线切换,实现二段速、三段速和软着陆等应用;
强悍的带轴能力,6-64轴,EtherCAT最快周期可达125us,EtherCAT和脉冲轴混合使用。
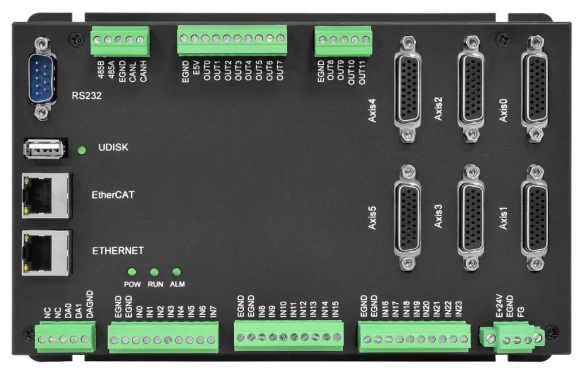
ZMC432HGT 全国产EtherCAT运动控制器
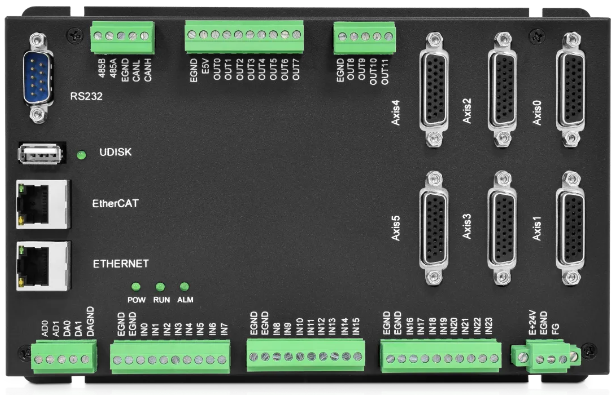
01 产品概述
ZMC432HGT,宽温阈(-40℃~80℃)全国产化器件硬件和全自主软件IDE与实时内核自主自研,自主可控。保障供应链持续供货能力,符合国产替代的国家战略需求。
结合丰富的运动控制功能、实时数据采集、处理和本地计算等,为运动控制协同工业互联网应用带来巨大市场潜力。
02 产品特性
32轴运动控制:支持点到点到多轴同步控制,EtherCAT运动周期最快可达250us;
支持6路10MHz脉冲输出和编码器轴接口,总线轴、脉冲轴可混合插补;
丰富的I/O接口,24路输入和12路输出,其中包括4路高速输入输出;
多类实时运动控制功能,视觉飞拍、多维PSO、高速PWM、高速硬件锁存等;
EtherNET网口对接MES、云平台
可配置Linux系统,实现工艺开发的差异化;
硬件核心器件全国产,运动控制核心runtime软件MotionRT正运动技术自主自研,PC端IDE RTSys正运动技术自主自研持续改进。
03 提供IOT一体化解决方案
ZMC432HGT具备丰富的硬件接口和功能模块,能实现高效稳定的运动控制和实时数据采集,满足工业控制协同工业互联网的应用需求。

审核编辑 黄宇
-
运动控制器
+关注
关注
2文章
400浏览量
24699 -
运动控制
+关注
关注
4文章
577浏览量
32852 -
正运动技术
+关注
关注
0文章
100浏览量
379
发布评论请先 登录
相关推荐
光峰科技荣获第十届红帆奖年度新质生产力百强企业

华秋荣获深圳市电子商会2024年度杰出分销商蓝点奖

宏德伟创荣获第七届“蓝点奖”年度杰出分销商奖

晶发电子荣获第七届“蓝点奖”诚信企业荣誉!

喜讯 | MDD辰达半导体荣获蓝点奖“最具投资价值奖”
MDD辰达半导体荣获蓝点奖“最具投资价值奖”

上海生物芯片有限公司荣获“2024年上海市五一劳动奖状”
博泰车联网创始人应宜伦荣获2024年上海市五一劳动奖章

北重集团北方股份公司董志明荣获“集团公司劳动模范”称号
华大九天主任工程师吴大可荣获“2024年首都劳动奖章”!
飞腾首席科学家窦强荣获 “2024年全国五一劳动奖章”
复旦微电子集团荣获上海市2024年全国五一劳动奖状






 工商网监
工商网监
评论