 运用在机器人关节控制领域的磁性旋转编码器芯片-AME200
运用在机器人关节控制领域的磁性旋转编码器芯片-AME200
机器人技术的迅猛发展已经在多个领域引起了革命性的变革,从制造业到医疗保健,再到日常生活。机器人的关节伺服电机控制是一种先进的技术,依靠电机驱动器、控制算法来完成精确的电流和速度控制,来调整电机的运动,以确保所需的位置、速度和力矩。
机器人关节控制
随着控制技术和半导体技术的发展进步,伺服控制广泛运用于多种领域,常见如:机器人、机器狗、监控、云台、道闸机、缝纫机和玩具等,目前针对机器人伺服电机控制方案,提出了小型化、开发便捷化、高性价比等更高的设计要求。
关节是工业机器人重要的基础部件之一,也是运动的核心部件:精密减速机。这是一种精密的动力传达机构,其利用齿轮的速度转换器,将电机的回转数减速到所要的回转数,并得到较大转矩的装置,从而降低转速,增加转矩。
机器人关节处的减速传动,要求传动链短、体积小、功率大、质量轻和易于控制,同时,对于中高载荷的工业机器人,还需要足够的刚度、回转精度和运动精度稳定性。
旋转编码器是一种用于测量旋转运动的传感器,它可以将旋转运动转换为数字信号,常用于机械设备、机器人、汽车和航空航天等领域。旋转编码器的工作原理是基于光学或磁性原理,通过测量旋转轴的角度和方向来输出相应的数字信号。
 磁性旋转编码器芯片 - AME200
磁性旋转编码器芯片 - AME200
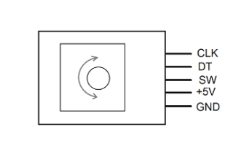
推荐一款由工采网代理的磁性旋转编码器芯片- AME200,该芯片是中科阿尔法推出的新一代基于AMR技术和高性能、专用ASIC信号处理器基础上开发的磁编码器芯片。该芯片内部包含了两对互成45°放置的差分惠斯通电桥组成的AMR传感器元件,能够感应在芯片X-Y平面上旋转磁场分量,并随着磁场角的变化输出相位差90°两路正弦电压信号,再经后续专用电路的放大、补偿和计算后得到角度值,经过特定算法输出ABZ信号,或UVW、PWM、SDI信号,可根据需要进行编程选择(配置)和读取当前角度。用户可以根据需要选择输出模式和参数,订货时注明,也可通过I2C口配置。
AME200提供了单线的12位绝对值PWM输出模式,PWM输出信号其占空比与绝对角位置值成正比。即PWM整个周期包含了4095个较小时钟单元,即一个周期平均分成了4095份,用来表示0~360°绝对角度,高电平个数与绝对角度成线性关系。
如果PWM频率为666Hz,周期T为1.5ms;如果PWM频率为6.67kHz,周期T为150us;推荐使用PWM频率为666Hz。也可以根据用户需要,输出其他格式或频率、位数。
磁性旋转编码器 - AME200的特性:
基于AMR角度传感器和高性能集成电路ASIC处理芯片
非接触式角度测量(0~360°)或增量式编码器输出
多种输出模式:ABZ、UVW、PWM、SDI(四选一);I2C通信
ABZ输出分辨率可任意选择(256,512,1024,250,500,1000 等)
UVW输出支持1~16对极
PWM输出频率可编程
SDI输出脉冲数可编程
I2C通讯,实时读取当前角度;芯片参数可配置
在国产磁性传感器领域,工采网代理的中科阿尔法国产磁性旋转编码器便是其中的佼佼者。了解更多关于国产磁性旋转编码器的技术应用,请登录工采网官网进行咨询。
审核编辑 黄宇
-
机器人
+关注
关注
211文章
28328浏览量
206824 -
编码器
+关注
关注
45文章
3626浏览量
134342 -
磁性传感器
+关注
关注
0文章
101浏览量
15659
发布评论请先 登录
相关推荐
编码器在机器人技术中的应用 编码器在传感器系统中的作用
二进制编码器在机器人中的应用
旋转编码器的类型以及选择与设计注意要点

艾毕胜电子MT6701CT磁性角度编码器IC

MT6701磁编码IC在关节型喷涂机器人领域中的应用
带Arduino的旋转编码器设计 旋转编码器的工作原理和特点
人形机器人关节的磁编码器理想选择——AS5048 产品介绍
编码器在机器人系统中的应用

磁性编码器结构及原理






 工商网监
工商网监
评论