 NaVILA:加州大学与英伟达联合发布新型视觉语言模型
NaVILA:加州大学与英伟达联合发布新型视觉语言模型
日前,加州大学的研究人员携手英伟达,共同推出了一款创新的视觉语言模型——NaVILA。该模型在机器人导航领域展现出了独特的应用潜力,为智能机器人的自主导航提供了一种全新的解决方案。
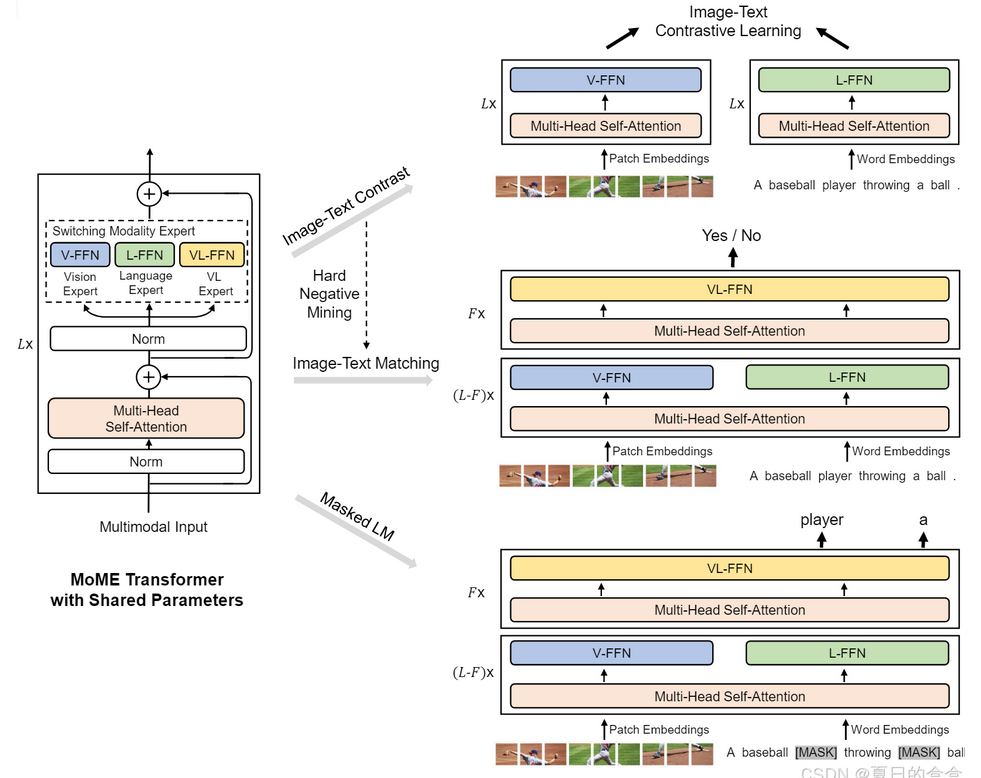
视觉语言模型(VLM)是一种具备多模态生成能力的先进AI模型。它能够智能地处理文本、图像以及视频等多种提示,并通过复杂的推理过程,实现对这些信息的准确理解和应用。NaVILA正是基于这一原理,通过将大型语言模型(LLM)与视觉编码器进行巧妙的结合,从而赋予了LLM“视觉感知”的神奇能力。
这一创新性的结合,使得NaVILA在机器人导航领域展现出了卓越的性能。它能够根据环境中的视觉信息,结合文本指令或描述,为机器人提供精确的定位和导航服务。这一特性不仅提高了机器人的自主性和智能化水平,还为机器人在复杂环境中的应用提供了更加广阔的空间。
NaVILA的发布,标志着视觉语言模型在机器人导航领域取得了重要的突破。未来,随着技术的不断发展和完善,相信NaVILA将在更多领域展现出其独特的价值和潜力,为人工智能技术的发展和应用贡献更多的力量。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
212文章
29061浏览量
210227 -
语言模型
+关注
关注
0文章
551浏览量
10502 -
英伟达
+关注
关注
22文章
3893浏览量
92628
发布评论请先 登录
相关推荐
英伟达Cosmos-Reason1 模型深度解读
英伟达近期发布的 Cosmos-Reason1 模型在物理常识推理领域引发广泛关注。作为专为物理世界交互设计的多模态大语言
VLM(视觉语言模型)详细解析
视觉语言模型(Visual Language Model, VLM)是一种结合视觉(图像/视频)和语言(文本)处理能力的多模态人工智能
英伟达发布Nemotron-CC大型AI训练数据库
近日,英伟达在其官方博客上宣布了一项重大进展,推出了一款名为Nemotron-CC的大型英文AI训练数据库。这一数据库的发布,标志着英伟达在

英伟达Blackwell可支持10万亿参数模型AI训练,实时大语言模型推理
、NVLink交换机、Spectrum以太网交换机和Quantum InfiniBand交换机。 英伟达称,Blackwell拥有6项革命性技术,可支持多达10万亿参数的模型进行AI训练
英伟达推出Eagle系列模型
英伟达最新推出的Eagle系列模型,以其1024×1024像素的高分辨率处理能力,重新定义了视觉信息处理的边界。该模型通过多专家
英伟达推出Flextron AI框架:赋能灵活高效的AI模型部署
在人工智能与机器学习领域,随着技术的不断演进,模型的高效部署与适应性成为研究的新热点。近日,英伟达与德克萨斯大学奥斯汀分校携手宣布了一项重大突破——推出了一种名为FLEXTRON的
商汤科技与泰国DTGO集团联合发布泰语大模型
「日日新」出海了! 7月10日,商汤联合泰国DTGO集 团及旗下Quinnnova共同发布「东风」泰语大模型 (DTLM),成为 全球首个能在泰文、中文、英文三种语言环境下高效工作的A

谷歌发布新型大语言模型Gemma 2
在人工智能领域,大语言模型一直是研究的热点。近日,全球科技巨头谷歌宣布,面向全球研究人员和开发人员,正式发布了其最新研发的大语言模型——Ge
英伟达开源Nemotron-4 340B系列模型,助力大型语言模型训练
近日,英伟达宣布开源了一款名为Nemotron-4 340B的大型模型,这一壮举为开发者们打开了通往高性能大型语言模型(LLM)训练的新天地
中山大学中山眼科中心与华为联合发布ChatZOC眼科大模型
[2024年6月6日]今天是第29个全国爱眼日,中山大学中山眼科中心与华为技术有限公司携手合作,联合发布基于人工智能技术研究构建的眼科大模型ChatZOC,为守护人民群众眼健康开辟新路径。 中山
英伟达首席执行官黄仁勋:AI模型推动英伟达AI芯片需求
近来,以ChatGPT为代表的AI聊天机器人已经导致英伟达AI芯片供应紧张。然而,随着能够创造视频并进行近似人类交流的新型AI模型问世,英伟
英伟达静候新品来临,亚马逊暂缓购买Grace Hopper
今年3月,英伟达发布了全新的Blackwell处理器,距离前任产品Hopper的发布不过短短一年。英伟达
进一步解读英伟达 Blackwell 架构、NVlink及GB200 超级芯片
计算工作负载、释放百亿亿次计算能力和万亿参数人工智能模型的全部潜力提供关键基础。
NVLink释放数万亿参数AI模型的加速性能,显著提升大型多GPU系统的可扩展性。每个英伟达Black
发表于 05-13 17:16





 工商网监
工商网监
评论