 基于STM32+Rd-03D做个智能人体跟随旋转台
基于STM32+Rd-03D做个智能人体跟随旋转台
前言
基于STM32F103C8T6+Rd-03D设计的智能人体跟随旋转台,可根据空间内人体的运动位置进行智能跟踪,将旋转台调整至对应的角度。
01项目功能
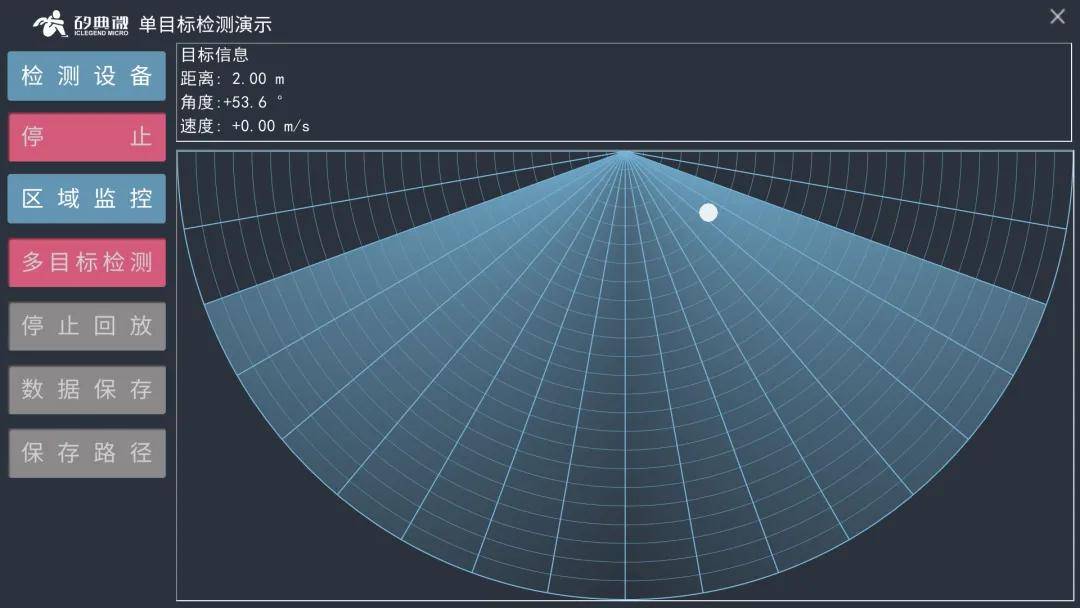
自动旋转功能:Rd-03D雷达可实时检测空间内人体运动的轨迹从而获取对应的空间坐标,通过坐标换算出对应的角度,再驱动步进电机从而将旋转台旋转至对应位置,无需人员手动操作。
无人校准功能:当空间内无人时,步进电机自动回到初始正中间的位置。
02所需产品及配置
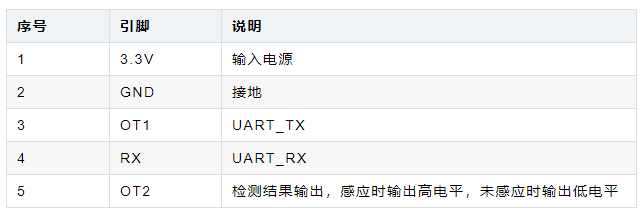
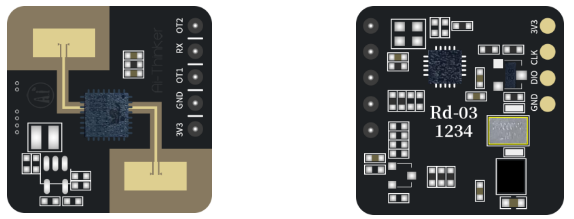
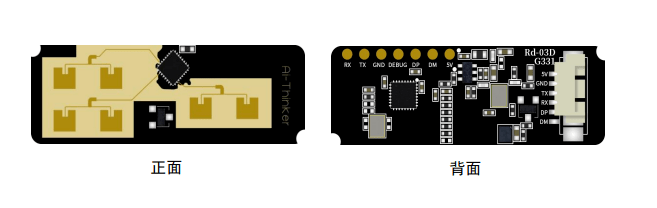
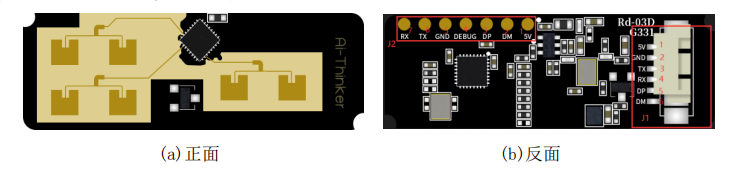
●采用安信可24G毫米波雷达模组——Rd-03D,内置智能定位跟踪算法,能够探测指定区域内的多个目标并实时上报结果。精准感知人体及区域运动状态,搭载的智能算法实现运动轨迹识别与跟踪,实现对区域内目标进行测速、测距。
●采用STM32F103C8T6芯片,经典通用MCU,资料齐全利于开发。
●选用步进电机,四相五线,脉冲控制。
雷达上位机
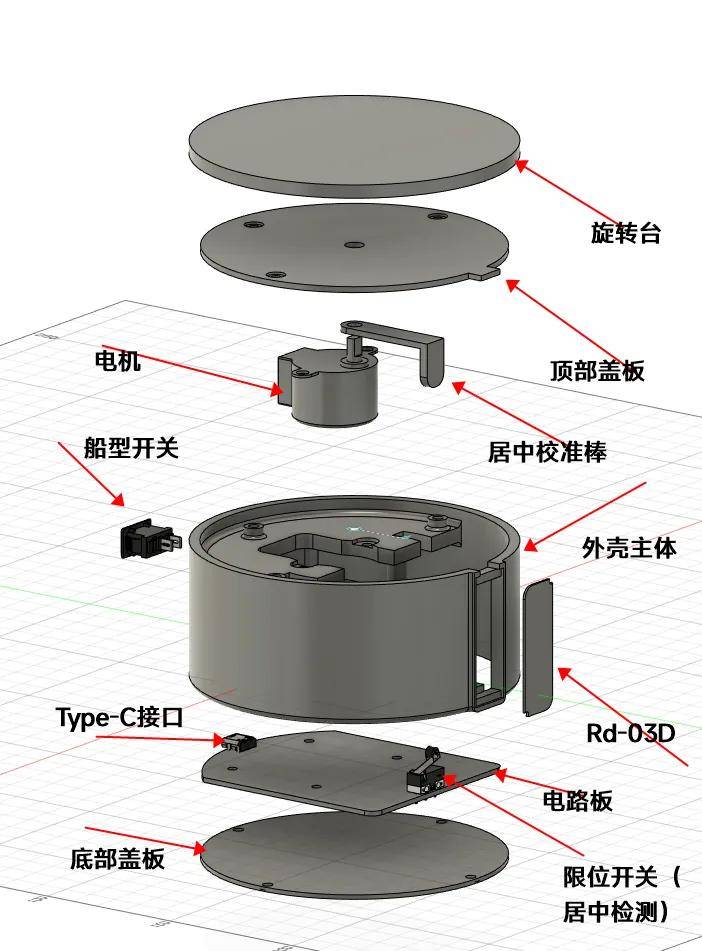
结构设计
本项目由以下部分组成,底部盖子、主体(含电路板)、顶部盖子、旋转台。
3D外壳文件见附件:AiPi-RD-Rotary(点击链接,附件见文尾)。
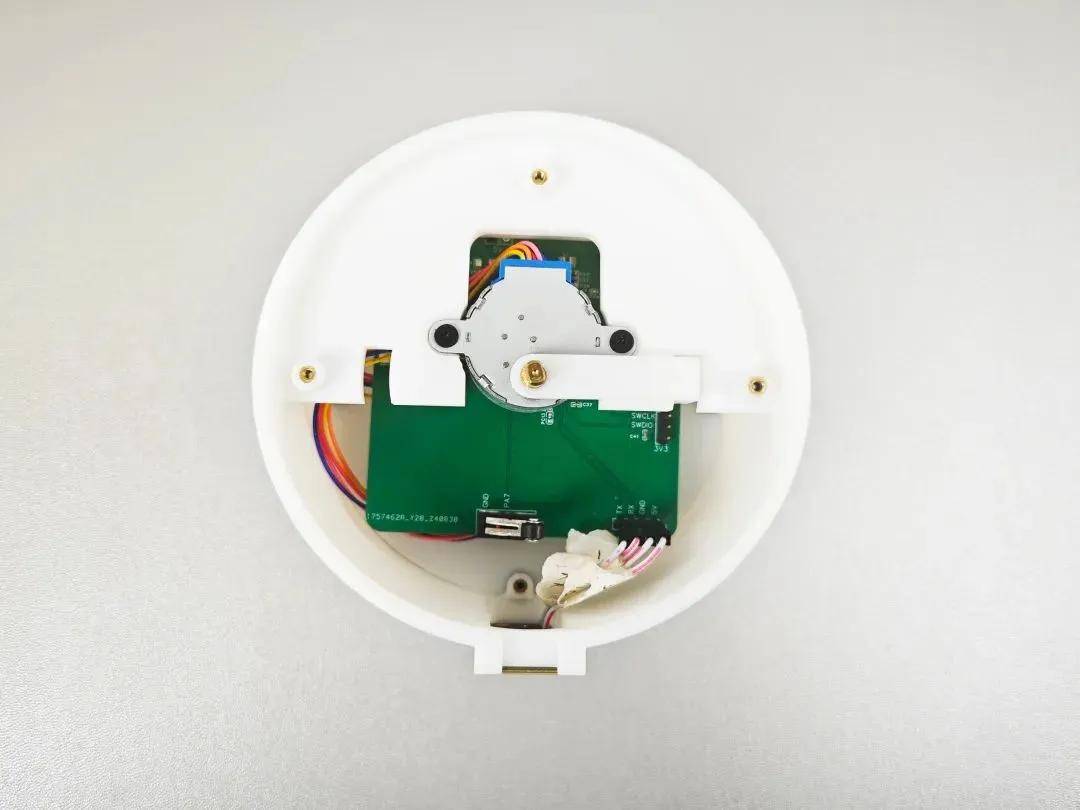
03实物图
俯视图:去掉旋转台

俯视图:去掉顶部盖子
完整展示

04更多资料
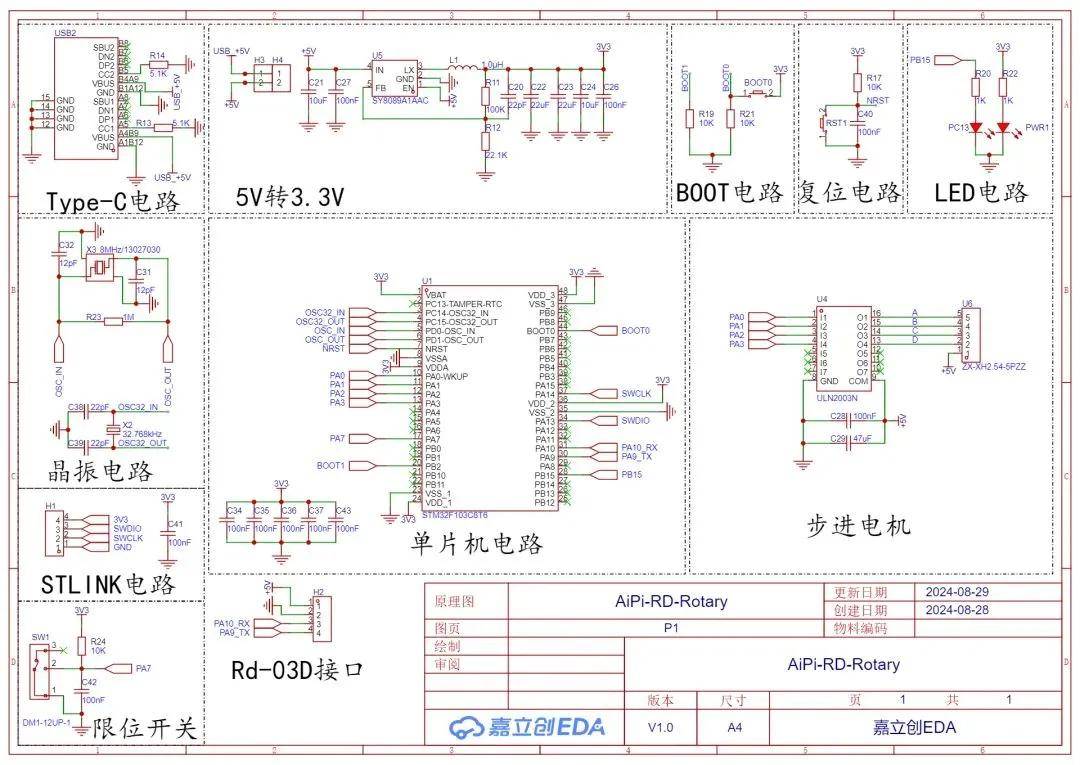
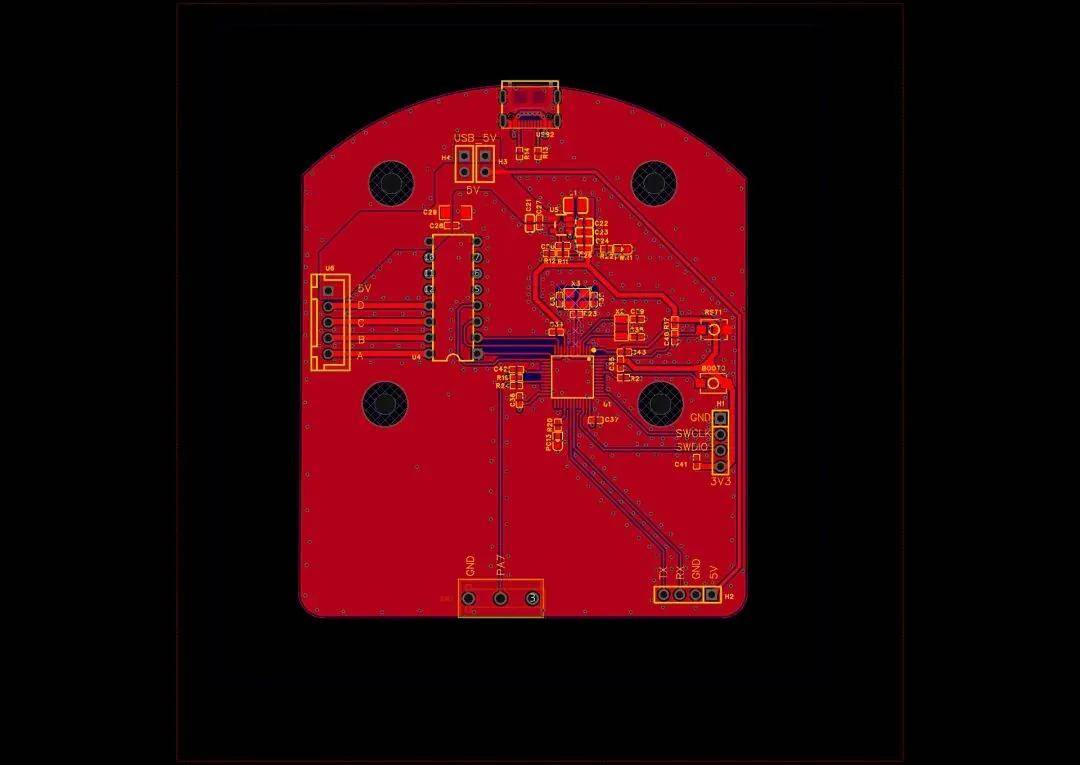
原理图
代码
AiPi-RD-Rotary(点击链接,代码见文尾)https://oshwhub.com/ai-thiner_openteam/aipi-rd-rotary
05注意事项
尽量保持在空旷的空间内进行检测;将旋转台摆置到雷达能检测到的朝向及空间;如果存在多人环境时,雷达会优先检测运动能量最大的目标。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
雷达
+关注
关注
50文章
2926浏览量
117454 -
跟踪算法
+关注
关注
0文章
41浏览量
13009 -
毫米波
+关注
关注
21文章
1923浏览量
64772
发布评论请先 登录
相关推荐
安信可新品雷达模组Rd-03搭配STM32制作简易人体感应雷达灯教程
安信可最新雷达模组Rd-03已经横空出世,为了方便大家使用该模组,本教程将使用STM32F103C8T6搭配Rd-03制作一个简易的人体检测雷达灯。
使用STM32解析Rd-03D的串口数据
安信可新款雷达模组Rd-03D已经上市,该雷达采用一发两收的天线,可以实现目标跟踪,实现对区域内目标测距、测角和测速。

STM32驱动Rd-03D实现不同角度点亮不同LED灯
安信可雷达模组Rd-03D已经上市,该雷达采用一发两收的天线,可以实现目标跟踪,实现对区域内目标测距、测角和测速。可用于智能控制空调、风扇等家电运行、智能马桶、感应灯、台灯、镜子灯、智能


高精度识别人体微动、运动!安信可Ai-Thinker24G人体感应雷达模组 Rd-03 重磅首发
自上个月,安信可发布了24G人体存在感应雷达模组Rd-01,一经推出,便受到了大量关注,不少开发者已经在开发应用。基于不同的应用需求,我们推出了另一款24G人体存在感应雷达模组Rd-03
基于安信可Rd-03+STM32制作人体检测雷达灯
各位小伙伴们,安信可最新雷达模组Rd-03已经横空出世啦!!! Rd-03支持检测人体存在、微动及运动,集高性价比、高性能、高可靠性、高精度识别等优势于一身,能够应用于智能家居、智

多人轨迹怎么识别?安信可Rd-03D雷达模组能做到!
Rd-03D是一款24GHz 单雷达,高性能24GHz一发两收微带天线的模组,能够探测指定区域内的多个目标并实时上报结果。精准感知人体及区域运动状态,搭载的智能算法实现运动轨迹识别与跟踪,实现对区域内目标进行测速、测距。
使用STM32解析Rd-03E的串口数据
安信可新款雷达模组Rd-03E已经上市,该雷达采用高性能一发一收微带天线,包含极简化24GHz雷达传感器硬件Rd-03E和智能算法固件RM01,而智能算法固件RM01采用FMCW波形和
安信可新款雷达模组Rd-03E精准测距效果
专有的先进信号处理技术,可以实现精准的人体测距和运动/微动人体感应。 本应用示例使用STM32解析Rd-03E的串口数据,检测人体距离雷达的
使用小安派-DSL-3.5寸开发的Rd-03D雷达检测站
Hello~工程师又来整活了。这是一个使用小安派-DSL-3.5寸开发的Rd-03D 雷达检测站,可以把Rd-03D检测的内容显示在3.5寸触摸屏上,直观地查看雷达的检测结果。

STM32驱动安信可Rd-03D,实现不同角度点亮不同LED灯
安信可雷达模组Rd-03D已经上市,该雷达采用一发两收的天线,可以实现目标跟踪,实现对区域内目标测距、测角和测速。可用于 智能控制空调、风扇等家电运行、智能马桶、感应灯、台灯、镜子灯、智能
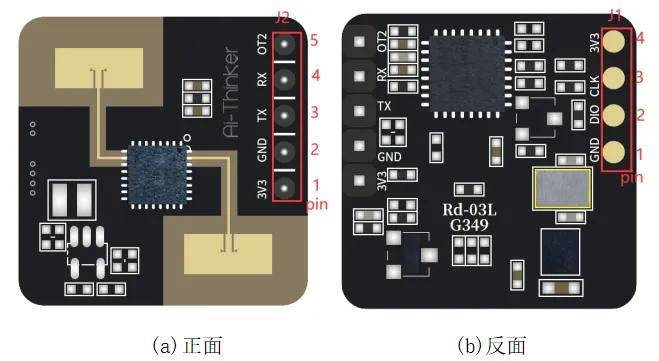
安信可雷达系列的超低功耗人体存在毫米波传感器—Rd-03L
Rd-03L是安信可雷达系列的超低功耗人体存在毫米波传感器,包含极简化24 GHz雷达传感器硬件和低功耗人体存在感应智能算法固件。
安信可Rd-03L检测使用—— 超低功耗实现人体存在检测,上位机配置快速上手
24GHz一发一收天线和外围电路;低功耗智能人体感应算法采用毫米波传感器距离测量技术和ICL1112芯片先进的专有雷达信号处理和低功耗控制技术,实现对运动、微动和静止人体的精确感知。 Rd-03L低功耗





 工商网监
工商网监
评论