 AI模型部署边缘设备的奇妙之旅:如何在边缘端部署OpenCV
AI模型部署边缘设备的奇妙之旅:如何在边缘端部署OpenCV
1 简介
Opencv(Open Source Computer Vision Library)是一个基于开源发行的跨平台计算机视觉库,它实现了图像处理和计算机视觉方面的很多通用算法,已成为计算机视觉领域最有力的研究工具。在深度学习中,我们会经常接触到两个名称,图像处理和计算机视觉,它们之间有什么区别呢?图像处理 (Image Processing)
目的:图像处理主要集中在改善或转换图像的质量,使得图像更适合人类观察或者为后续的分析做准备。
方法:通常涉及像素级别的操作,比如调整亮度、对比度、颜色校正、滤波(如高斯模糊、中值滤波去噪)、边缘检测、形态学变换(膨胀、腐蚀)等。
计算机视觉 (Computer Vision)
目的:计算机视觉的目标是使计算机能够理解和解释图像或视频的内容,实现类似于人类视觉系统的感知能力。
方法:使用高级算法来解析图像中的内容,包括但不限于特征提取、物体识别、分类、跟踪、场景重建等。这可能涉及到机器学习和深度学习模型的应用。
简而言之,图像处理是计算机视觉的基础,提供了必要的工具和技术来预处理和优化图像数据;而计算机视觉则是在此基础之上,通过更加复杂的算法和模型来解析图像的意义。在实际应用中,这两者往往是紧密结合的,共同作用于解决复杂的问题。例如,在一个自动驾驶系统中,图像处理可能会用于清理传感器输入的数据,而计算机视觉则负责识别道路上的行人、车辆和其他重要元素。
2 基础知识
OpenCV 是一个开源的计算机视觉和机器学习软件库,广泛用于图像处理、视频捕捉、物体检测等领域。一些常用操作及其目的:
读取图片
使用cv2.imread()函数加载图像。
目的:为后续处理和分析准备图像数据。
转换色彩空间
使用cv2.cvtColor()进行色彩空间转换。
目的:适应不同算法的需求,例如灰度图用于简化计算,HSV用于颜色分割等。
滤波
高斯模糊 (cv2.GaussianBlur)、均值滤波 (cv2.blur) 和双边滤波 (cv2.bilateralFilter) 等。
目的:降噪和平滑图像,或在保持边缘的同时模糊细节。
绘制图形
使用cv2.line()、cv2.rectangle()、cv2.circle()和cv2.polylines()来绘制直线、矩形、圆形或多边形。
目的:可视化结果,标注图像中的特征或者创建掩码。
边缘检测
Canny 边缘检测 (cv2.Canny) 或 Sobel 操作符 (cv2.Sobel)。
目的:检测图像中物体的边界,是很多高级计算机视觉任务的基础步骤。
阈值操作
cv2.threshold()用于二值化图像。
目的:突出显示感兴趣区域,简化图像以利于进一步分析。
Sobel 滤波
使用cv2.Sobel()计算图像梯度。
目的:增强边缘,通常与边缘检测相关联。
文件保存
cv2.imwrite()将图像保存到磁盘。
目的:保存处理后的图像以便将来使用或分享。
此外,还有其他重要的OpenCV功能,如:
直方图均衡化(cv2.equalizeHist) 提升图像对比度。
模板匹配(cv2.matchTemplate) 用于查找一个图像中的另一个小图像的位置。
特征点检测和描述子计算,如 SIFT, SURF, ORB 等,用于图像配准、拼接等任务。
这些基础操作和高级特性共同构成了强大的工具集,可以用来开发从简单的图像编辑应用到复杂的计算机视觉系统。 这些操作是构建复杂图像处理流水线的基础,可以单独使用,也可以组合起来解决更复杂的视觉问题。例如,预处理阶段可能会包括去噪、边缘检测和形态学操作;而在后处理阶段,则可能会涉及阈值操作和绘制几何图形来标注或解释结果。以上这些算子仅仅是OpenCV库的一小部分的内容,但是它们是支持我们进行复杂操作的基础。
3 实际操作
在学习OpenCV的初期,可能会觉得每个算子或函数就像是独立的知识点,虽然能够理解它们各自的功能和用法,但当面对实际问题时,却难以将这些知识点有效地组合起来解决问题。这是因为从理论到实践的应用需要一个过渡的过程,在这个过程中,不仅需要掌握单个算子的操作,还需要学会如何根据具体的需求选择合适的算子,并且合理地调整参数以达到预期的效果。OpenCV的强大之处在于它提供了丰富的图像处理功能,但这也意味着使用它的难点在于:
理解和记忆大量的算子:OpenCV库中包含了大量的算子,每个算子都有其特定的应用场景和参数设置。对于初学者来说,理解和记住这么多的内容可能是一个挑战。
算子之间的组合应用:很多情况下,单独使用一个算子并不能完成复杂的任务,而是需要多个算子相互配合。这就要求学习者不仅要了解各个算子的工作原理,还要懂得如何将它们有机地结合起来,以实现更复杂的功能。
参数调优:每个算子通常都带有一系列可调节的参数,这些参数的选择直接影响到最终的结果。找到一组最优化的参数值往往需要通过不断的实验和尝试,这既考验耐心也考验经验。
解决实际问题的能力:将理论知识应用于实践,解决真实世界中的问题是学习任何技术的关键。对于OpenCV而言,这意味着要能够分析给定的任务需求,确定所需的操作步骤,并正确地执行这些步骤。为了克服上述困难,建议多做练习,特别是针对不同类型的图像处理任务进行实战演练。同时,可以参考官方文档、在线教程以及社区讨论来加深对算子的理解,学习他人是如何解决问题的。此外,不断积累经验和案例研究也会有助于提高解决新问题的能力。
本文章主要讲述如何在边缘端设备上使用OpenCV。本次使用的边缘端设备是凌智电子开发的凌智视觉模块,具体如下:

如对该边缘端设备感兴趣,可到Gitee仓库:凌智视觉模块查看该设备的具体信息。
接下来我们通过几个例子来介绍如何在边缘端设备使用OpenCV进行形状检测。
3.1 矩形检测
importlockzhiner_vision_module.cv2ascv2fromlockzhiner_vision_module.editimportEditimporttimeimportsysif__name__ =="__main__": args = sys.argv iflen(args) !=3: print("Need model path. Example: python test_capture.py width height") exit(1) edit = Edit() edit.start_and_accept_connection() video_capture = cv2.VideoCapture() video_capture.set_width(int(args[1])) video_capture.set_height(int(args[2])) ifvideo_capture.open(0)isFalse: print("Failed to open capture") exit(1) whileTrue: read_index =0 total_time_ms =0 foriinrange(30): start_time = time.time() ret, mat = video_capture.read() ifretisFalse: continue end_time = time.time() # 转换为灰度图像 gray = cv2.cvtColor(mat, cv2.COLOR_BGR2GRAY) # 高斯模糊 blurred = cv2.GaussianBlur(gray, (5, 5), 0) # 二值化 _, binary = cv2.threshold(blurred, 127, 255, cv2.THRESH_BINARY_INV) edges = cv2.Canny(binary, 30, 200) contours, _ = cv2.findContours(edges.copy(), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE) for contour in contours: # 近似轮廓 # 计算轮廓周长 epsilon = 0.02 * cv2.arcLength(contour, True) # 将轮廓近似为多边形 if epsilon < 15: continue approx = cv2.approxPolyDP(contour, epsilon, True) # 如果近似轮廓有4个顶点,则认为是矩形 if len(approx) == 4: cv2.putText(mat, "Rectangle", (50,50), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2) cv2.drawContours(mat, [approx], -1, (0, 255, 0), 2) edit.print(mat) total_time_ms += end_time - start_time read_index += 1 print(f"FPS is {1.0 / (total_time_ms / read_index)}")
在这一段代码中的检测效果如下图所示
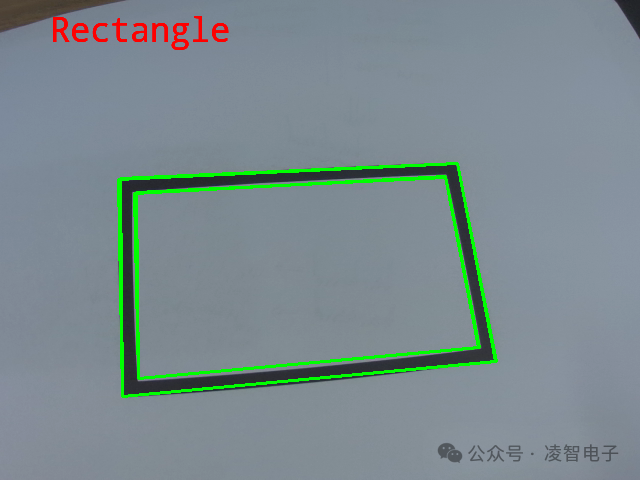
但是当我们只想要外部的矩形时,我们可以怎么做呢?
contours, _ = cv2.findContours(edges.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
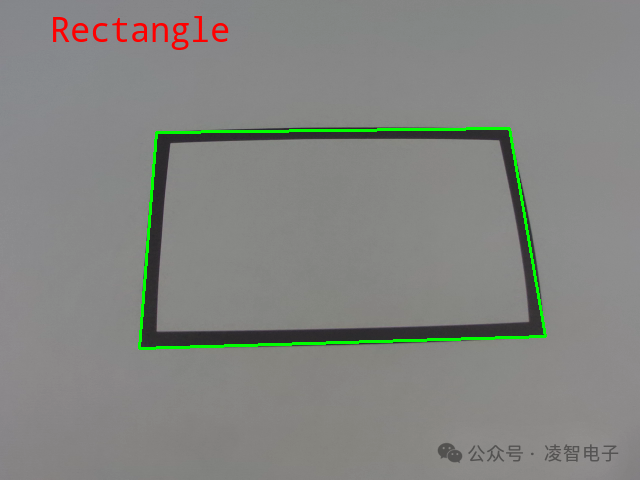
效果如上图所示,接下来我们就得深究一下cv2.findContours mode 参数 和 method 参数的区别及作用了,我就不一一演示了,大家伙可以自行实验,毕竟我也踩过。mode: 轮廓检索模式,定义了如何检索轮廓及其层次结构。有以下几种选择:
cv2.RETR_EXTERNAL: 只检索最外层的轮廓。
cv2.RETR_LIST: 检索所有的轮廓,但不建立它们之间的等级关系。
cv2.RETR_CCOMP: 检索所有的轮廓,并将它们组织为两级层次结构:顶层是外部边界,次级是孔洞。
cv2.RETR_TREE: 检索所有轮廓,并重建完整的包含关系。
method: 轮廓近似方法,决定了轮廓的精度。有以下几种选择:
cv2.CHAIN_APPROX_NONE: 存储所有的轮廓点,即没有近似。
cv2.CHAIN_APPROX_SIMPLE: 压缩水平、垂直和对角方向上的元素,只保留端点。
cv2.CHAIN_APPROX_TC89_L1: 使用一种称为 Teh-Chin 链逼近算法的更复杂的压缩方式。
cv2.CHAIN_APPROX_TC89_KCOS: 同样使用 Teh-Chin 链逼近算法,但与 L1 不同,它是基于 KCOS 的。
3.2 圆形检测
OpenCV 提供了HoughCircles函数来检测圆形。Hough变换是一种用于从图像中提取几何形状(如直线、圆等)的技术,它通过参数空间的投票机制来实现。对于圆形检测,Hough变换可以识别出满足特定条件的圆形结构。下面是使用 OpenCV 进行圆形检测的基本步骤:
首先加载需要检测圆的图像,并将其转换为灰度图,因为颜色信息对于圆形检测不是必要的。调用cv2.HoughCircles函数进行圆形检测。该函数接受几个重要参数:
method:定义了检测方法,通常使用cv2.HOUGH_GRADIENT。
dp:累加器分辨率与图像分辨率的反比。dp=1 表示累加器具有与输入图像相同的分辨率。
minDist:检测到的圆心之间的最小距离。如果设置得太小,可能会检测到多个相邻的圆;如果太大,可能会漏检一些圆。
param1:Canny边缘检测的高阈值,低阈值是高阈值的一半。
param2:累加器阈值。该阈值越小,检测到的圆越多(包括不完美的圆)。越大则只检测到更明显的圆。
minRadius和maxRadius:分别为检测到的圆的最小和最大半径。
请注意,上述参数 (dp,minDist,param1,param2,minRadius,maxRadius) 需要根据具体应用场景调整,以获得最佳检测效果。例如,不同的光照条件、背景复杂度或者目标圆的大小都会影响这些参数的选择。实例代码
fromlockzhiner_vision_module.cv2importVideoCaptureimportlockzhiner_vision_module.cv2ascv2fromlockzhiner_vision_module.editimportEditimporttimeimportsyspi =3.14159265358979323846if__name__ =="__main__": args = sys.argv iflen(args) !=3: print("Need model path. Example: python test_capture.py width height") exit(1) edit = Edit() edit.start_and_accept_connection() video_capture = VideoCapture() video_capture.set_width(int(args[1])) video_capture.set_height(int(args[2])) ifvideo_capture.open(0)isFalse: print("Failed to open capture") exit(1) whileTrue: read_index =0 total_time_ms =0 foriinrange(30): start_time = time.time() ret, mat = video_capture.read() ifretisFalse: continue end_time = time.time() # 转换为灰度图像 # 转换为灰度图像 gray = cv2.cvtColor(mat, cv2.COLOR_BGR2GRAY) # 使用高斯模糊减少噪声 blurred = cv2.GaussianBlur(gray, (9, 9), 2) # 使用 HoughCircles 检测圆形 circles = cv2.HoughCircles(blurred, cv2.HOUGH_GRADIENT, dp=1, minDist=50, param1=50, param2=30, minRadius=120, maxRadius=250) # print(circles) if circles is not None: # 在图像上绘制检测到的圆 for i in circles[0]: center = (int(i[0]), int(i[1])) radius = int(i[2]) cv2.putText(mat, "circle", (50, 50), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 0, 255), 2) # 绘制圆心 cv2.circle(mat, center, 1, (0, 100, 100), 3) # 绘制圆 cv2.circle(mat, center, radius, (0, 255, 0), 3) edit.print(mat) total_time_ms += end_time - start_time read_index += 1 print(f"FPS is {1.0 / (total_time_ms/read_index)}")
检测效果图 :

-
图像处理
+关注
关注
27文章
1288浏览量
56709 -
AI
+关注
关注
87文章
30643浏览量
268824 -
OpenCV
+关注
关注
31文章
634浏览量
41329
发布评论请先 登录
相关推荐
AI模型部署边缘设备的奇妙之旅:如何实现手写数字识别

AI模型部署边缘设备的奇妙之旅:如何实现手写数字识别
恩智浦如何在边缘设备上部署LLM
如何在STM32f4系列开发板上部署STM32Cube.AI,
利用恩智浦云实验室部署AI模型

支持大模型部署和运行的边缘计算SoC芯片
部署在边缘设备上的轻量级模型
NVIDIA与恩智浦联手,在边缘设备上部署AI模型
使用CUBEAI部署tflite模型到STM32F0中,模型创建失败怎么解决?
AI边缘计算机应用场景广泛!大语言模型与数字人结合方案在边缘侧落地





 工商网监
工商网监
评论