 卡尔曼滤波在机器人导航中的应用
卡尔曼滤波在机器人导航中的应用
卡尔曼滤波的基本原理
卡尔曼滤波是一种基于贝叶斯滤波的算法,它通过结合预测和更新两个步骤来估计系统的状态。算法的核心在于最小化估计误差的方差,从而提供最优的状态估计。
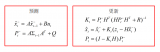
- 预测步骤 :基于系统的动态模型,预测下一时刻的状态和协方差。
- 更新步骤 :利用新的观测数据,调整预测状态,以减少误差。
卡尔曼滤波的关键优势在于其递归性,这意味着它可以实时处理数据流,而不需要存储整个观测序列。
机器人导航中的卡尔曼滤波
在机器人导航中,卡尔曼滤波被用来估计机器人的位置、速度和方向。这些信息对于机器人的自主行动至关重要。
状态估计
机器人的状态通常包括位置(x, y)和方向(θ)。卡尔曼滤波通过结合传感器数据(如里程计、陀螺仪和GPS)来估计这些状态。
- 里程计 :提供机器人的线速度和角速度。
- 陀螺仪 :提供角速度,用于估计方向变化。
- GPS :提供全局位置信息,但可能存在较大的噪声。
卡尔曼滤波将这些传感器数据融合,以获得更准确的状态估计。
定位和地图构建
在同时定位与地图构建(SLAM)任务中,卡尔曼滤波被用来估计机器人的位置和构建环境地图。通过融合来自激光雷达(LIDAR)、摄像头等传感器的数据,卡尔曼滤波可以帮助机器人在未知环境中导航。
避障和路径规划
在避障和路径规划中,卡尔曼滤波可以提供关于障碍物位置的估计,这对于规划安全路径至关重要。通过预测障碍物的动态变化,卡尔曼滤波可以帮助机器人避免碰撞。
实现卡尔曼滤波
实现卡尔曼滤波需要定义系统的动态模型和观测模型。以下是实现卡尔曼滤波的基本步骤:
- 定义状态向量 :包含机器人的位置、速度和方向。
- 定义动态模型 :描述状态如何随时间变化。
- 定义观测模型 :描述如何从状态向量中获得观测数据。
- 初始化状态和协方差矩阵 :设置初始估计和不确定性。
- 预测步骤 :根据动态模型预测下一时刻的状态和协方差。
- 更新步骤 :使用观测数据更新预测状态。
卡尔曼滤波的挑战
尽管卡尔曼滤波在机器人导航中非常有效,但它也面临一些挑战:
- 非线性系统 :卡尔曼滤波假设系统是线性的,但在实际应用中,机器人的动态可能是非线性的。这需要使用扩展卡尔曼滤波(EKF)或无迹卡尔曼滤波(UKF)等方法来处理非线性。
- 传感器噪声和误差 :传感器数据可能包含噪声和误差,这会影响卡尔曼滤波的性能。
- 计算资源 :对于大规模系统,卡尔曼滤波的计算需求可能很高,尤其是在实时应用中。
结论
卡尔曼滤波是机器人导航中一个不可或缺的工具,它通过融合多种传感器数据来提供准确的状态估计。尽管存在挑战,但卡尔曼滤波及其变体仍然是解决机器人导航问题的有效方法。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28799浏览量
209061 -
存储
+关注
关注
13文章
4382浏览量
86288 -
导航
+关注
关注
7文章
536浏览量
42616 -
卡尔曼滤波
+关注
关注
3文章
166浏览量
24734
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主机器人
发表于 01-04 19:22
移动机器人核心科技解码:导航、感知与掌控力的深度剖析
富唯智能移动机器人的核心技术主要包括导航、感知与控制。这些技术共同决定了移动机器人在不同环境中的自主行动能力和工作效率。
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
的设计不仅提高了机器人对环境的理解能力,还使其能够更精准地执行复杂任务。
扩散模型的新思路
除了大模型,扩散模型的引入为机器人控制开辟了新的研究方向。在以UniPi为代表的创新工作中,
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】+数据在具身人工智能中的价值
嵌入式人工智能(EAI)将人工智能集成到机器人等物理实体中,使它们能够感知、学习环境并与之动态交互。这种能力使此类机器人能够在人类社会中有效地提供商品及服务。
数据是一种货币化工具
数
发表于 12-24 00:33
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
关键路径:利用GNSS和IMU等传感器直接获取位置信息,同时通过摄像头、激光雷达获取环境距离信息反向推算位置。在数据处理环节,采用卡尔曼滤波器和最大后验估计方法融合多传感器数据,优化机器人
发表于 12-19 22:26
卡尔曼滤波在图像处理中的应用实例 如何调优卡尔曼滤波参数
、速度等属性的估计。例如,在视频监控系统中,卡尔曼滤波可以用于跟踪行人的运动轨迹,为行为分析和异常检测提供基础数据。
卡尔曼滤波器的特性及仿真
我们前一篇关于人物识别跟踪的文章《视频连续目标跟踪实现的两种方法和示例(更新)》里讲到,视频图像中物体的识别和跟踪用到了卡尔曼滤波器(KF)。这里对这个话题我们稍微对这个

自动停车机器人,如何快速构建?
现场作业 ▲停车移动机器人构成 科聪停车机器人 解决方案 -KC SOLUTION 本方案中核心部分采用的是科聪通用移动机器人控制器,导航方

编码器在机器人系统中的应用
随着科技的飞速发展,机器人技术已广泛应用于工业、医疗、服务等多个领域。在机器人系统中,编码器作为核心的位置和速度检测装置,发挥着至关重要的作用。本文将从编码器的原理、分类及其
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
已经取得了显著的进步,但在技术层面仍存在一些壁垒需要突破。首先,机器人的导航和定位技术仍有提升空间,特别是在复杂家居环境中的精准导航和避障能
发表于 05-05 15:03
卡尔曼滤波是什么 卡尔曼滤波与目标追踪技术分析
卡尔曼滤波以及其扩展算法能够应用于目标状态估计,如果这个目标是行人,那么就是行人状态估计(或者说行人追踪),如果这个目标是自身,那么就是车辆自身的追踪(结合一些地图的先验,GPS等数据的话就是自身的定位)。






 工商网监
工商网监
评论